|
|
|
Tiempo de ejecución y control en tiempo real Los autómatas programables son maquinas secuenciales que ejecutan correlativamente las instrucciones indicadas en el programa de usuario almacenado en su memoria, generando unas ordenes o señales de mando a partir de las señales de entrada leídas de la planta ( aplicación): al detectarse cambios en las señales, el autómata reacciona según el programa hasta obtener las ordenes de salida necesarias. Esta secuencia se ejecuta continuamente para conseguir el control actualizado del proceso. La secuencia básica de operación del autómata se puede dividir en tres fases principales:
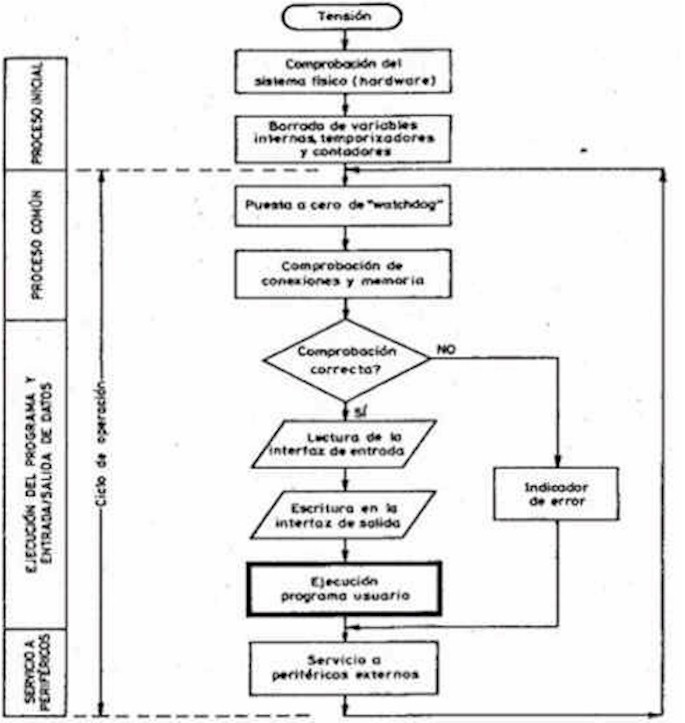
A fin de optimizar el tiempo, la lectura y escritura de las señales se realiza a la vez para todas las entradas y salidas; Entonces, las entradas leídas de los módulos de entrada se guardan en una memoria temporal (Imagen entradas). A esta acude la CPU en la ejecución del programa, y según se va obteniendo las salidas, se guardan en otra memoria temporal ( imagen de salida). Una vez ejecutado el programa completo, estas imágenes de salida se transfieren todas a la vez al módulo de salida. El autómata realiza también otra serie de acciones que se van repitiendo periódicamente, definiendo un ciclo de operación. Dichas acciones se pueden observar en el diagrama de bloques de la figura 2.2.1.
Figura 2.2.1
El autómata de OMRON CQM1H puede trabajar de tres formas diferentes: Program El PLC está en reposo y puede recibir o enviar el programa a un periférco. Monitor El PLC ejecuta el programa que tiene en memoria. Run El PLC ejecuta el programa que tiene en memoria permitiendo el cambio de valores en los registros del mismo.
El funcionamiento del autómata es, salvo el proceso inicial que sigue a un Reset, de tipo secuencial y cíclico, es decir, las operaciones tienen lugar una tras otra, y se van repitiendo continuamente mientras el autómata esté bajo tensión. La figura 2.2.1 muestra esquemáticamente la secuencia de operaciones que ejecuta el autómata, siendo las operaciones del ciclo de operación las que se repiten indefinidamente. El ciclo de funcionamiento se divide en dos partes como se puede observar en el esquema de diagrama de la figura 2.2.1 llamados Proceso Inicial y Ciclo de Operación. Proceso inicial Como se muestra en la figura, antes de entrar en el ciclo de operación el autómata realiza una serie de acciones comunes, que tratan fundamentalmente de inicializar los estados del mismo y chequear el hardware. Estas rutinas de chequeo, incluidas en el programa monitor ROM, comprueban:
Si se encontrara algún error en el chequeo, se activaría el LED de error y quedaría registrado el código del error. Comprobadas las conexiones, se inicializan las variables internas:
Transcurrido el Proceso Inicial y si no han aparecido errores el autómata entra en el Ciclo de Operación. Este ciclo puede considerarse dividido en tres bloques tal y como se puede observar en la figura 2.2.1, dichos bloques son:
Proceso común: En este primer bloque se realizan los chequeos cíclicos de conexiones y de memoria de programa, protegiendo el sistema contra:
El chequeo cíclico de conexiones comprueba los siguientes puntos:
El chequeo de la memoria de programa comprueba la integridad de la misma y los posibles errores de sintaxis y gramática:
Ejecución del programa: En este segundo bloque se consultan los estados de las entradas y de las salidas y se elaboran las ordenes de mando o de salida a partir de ellos.
Y a su vez esto depende, respectivamente de:
Servicio a periféricos: Este tercer y último bloque es únicamente atendido si hay pendiente algún intercambio con el exterior. En caso de haberlo, la CPU le dedica un tiempo limitado, de 1 a 2ms, en atender el intercambio de datos. Si este tiempo no fuera suficiente, el servicio queda interrumpido hasta el siguiente ciclo. Tiempo de ejecución y control en tiempo real El tiempo total que el autómata emplea para realizar un ciclo de operación se llama tiempo de ejecución de ciclo de operación o más sencillamente tiempo de ciclo "Scan time". Dicho tiempo depende de:
Los tiempos totales de ciclos son entonces la suma de tiempos empleados en realizar las distintas operaciones del ciclo como se puede ver en la figura 2.2.2:
(Los tiempos de ejecución de instrucciones se miden en unidades de microsegundos, resultando un tiempo de escrutación del programa variable en función del número e instrucciones contenidas. Precisamente el tiempo de escrutación es uno de los parámetros que caracterizan a un autómata expresado normalmente en milisegundos por cada mil instrucciones ms/k).
Tiempo total SCAN = T1 + T2 + T3 + T4 |
|