

Se dispara un proyectil desde una plataforma en rotación
Se dispara un proyectil con velocidad inicial v0 desde una plataforma en rotación con velocidad angular constante ω desde una posición situada a una distancia d al eje de rotación, formando un ángulo θ con el eje vertical y otro ángulo φ con la perpendicular a la línea que une el centro de la plataforma y la posición de disparo (eje X).
También podría describir el chorro de agua que sale de un aspersor, el dispositivo que al girar alrededor de su eje vertical distribuye agua sobre una superficie circular
En el caso del aspersor, hay una relación entre la velocidad angular de rotación ω y la velocidad inicial v0, véase el artículo citado en las referencias
Sistema de referencia inercial
En el sistema inercial de referencia, el proyectil parte de la posición
Con velocidad inicial
El movimiento del proyectil es la composición de tres movimientos: uniformes a lo largo del eje X e Y y uniformemente acelerado a lo largo del eje Z
Alcance
El proyectil retorna a la plataforma z=0, en el instante tf
El alcance del proyectil es
Elevamos al cuadrado ambos términos y simplificamos, teniendo en cuenta que sin2(ωt)+cos2(ωt)=1, llegamos al resultado
Sistema de referencia en rotación
En el sistema de referencia en rotación el eje Z' coincide con el eje Z que es el eje de rotación
La relación entre las aceleraciones , en el sistema de referencia en rotación y , en el sistema de referencia inercial es
, es la velocidad en el sistema de referencia en rotación
, es la posición
, es la velocidad angular de rotación
Los resultados de los productos vectoriales son
Tenemos que resolver el sistema de tres ecuaciones diferenciales
Con las condiciones iniciales, para t=0
La última ecuación diferencial es la más fácil de integrar, se trata de un movimiento rectilíneo uniformemente acelerado
Para las dos primeras ecuaciones diferenciales, utilizamos notación compleja
Las raíces de la ecuación característica son iguales
La solución de esta ecuación diferencial lineal con raíces repetidas es
Donde C y D son coeficientes complejos cuya parte real e imaginaria se determinan a partir de las condiciones iniciales:
Los coeficientes valen
Conocidas las componentes de la velocidad inicial, obtenemos la parte real x'(t) e imaginaria y'(t) de ξ
Alcance
El tiempo que tarda el proyectil en regresar a la plataforma z'=0
El alcance es
El mismo resultado se ha obtenido para el sistema de referencia inercial
Alcance máximo se obtiene
Se resuelve este sistema de dos ecuaciones para obtener θm y φm que hacen que el alcance R sea máximo
Ejemplos
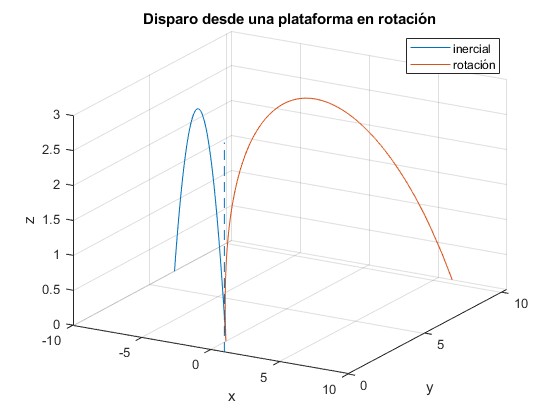
Representamos la trayectoria del proyectil en el sistema inercial de referencia y en el sistema de referencia en rotación para
- Velocidad angular de rotación, ω=5 rad/s
- Distancia al eje de rotación, d=1 m
- Velocidad inicial, v0=10 m/s
- Angulos de tiro: con la vertical Z, θ=0, con el eje X, φ=0. (disparo vertical)
v0=10; %velocidad inicial
th=0; %ángulos de tiro
phi=0;
d=1; %distancia al eje de rotación
w=5; %velocidad angular de rotación
tf=2*v0*cos(th)/9.8;%tiempo de regreso
%inercial
x=@(t) (v0*sin(th)*cos(phi)-w*d)*t;
y=@(t) d+v0*sin(th)*sin(phi)*t;
z=@(t) v0*cos(th)*t-4.9*t.^2;
hold on
fplot3(x,y,z,[0,tf]);
%en rotación
X=@(t) (v0*sin(th)*cos(phi)-w*d)*t.*cos(w*t)+(d+v0*sin(th)*sin(phi)*t).*sin(w*t);
Y=@(t) -(v0*sin(th)*cos(phi)-w*d)*t.*sin(w*t)+(d+v0*sin(th)*sin(phi)*t).*cos(w*t);
fplot3(X,Y,z,[0,tf]);
line([d,d],[0,0],[0,3],'lineStyle','--')
hold off
grid on
xlabel('x')
ylabel('y')
zlabel('z')
legend('inercial','rotación','Location','best')
title('Disparo desde una plataforma en rotación')
view(30,25)
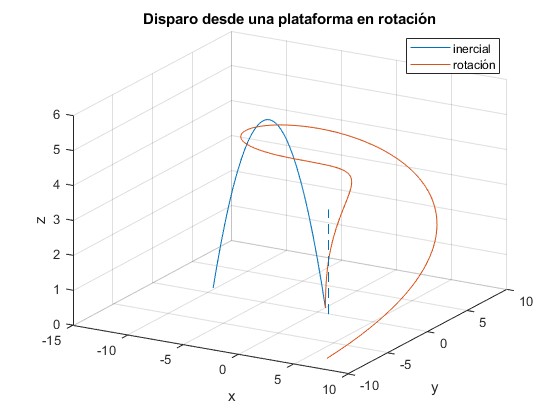
La línea a trazos señala el eje Z de rotación
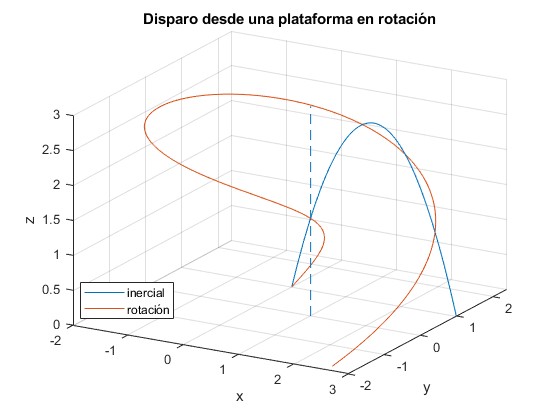
Cambiamos los ángulos de tiro, θ=π/4 (45°) y φ=0
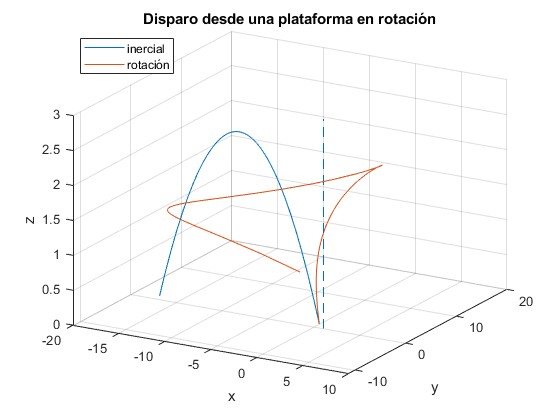
Cambiamos los ángulos de tiro, θ=π/4 (45°) y φ=π (180°)
Representamos el alcance R en función de los ángulos de tiro θ y φ para la velocidad inicial v0=10 m/s y una velocidad angular de rotación, ω=1 rad/s
Se señala mediante un punto de color rojo el alcance máximo
phi=linspace(0,2*pi,50);
th=linspace(0,pi/2,50);
v0=10; %velocidad inicial
w=1; %velocidad angular de rotación
[Th,Phi]=meshgrid(th,phi);
Z=sqrt(v0^4*sin(2*Th).^2/9.8^2+d^2*(4*w^2*v0^2*cos(Th).^2/9.8^2+1)+
2*d*v0^2*sin(2*Th).*(sin(Phi)-2*w*v0*cos(Th).*cos(Phi)/9.8)/9.8);
hold on
mesh(Th,Phi,Z);
set(gca,'XTick',0:pi/6:pi/2)
set(gca,'XTickLabel',{'0','\pi/6','\pi/3','\pi/2'})
set(gca,'YTick',0:pi/2:2*pi)
set(gca,'YTickLabel',{'0','\pi/2','\pi','3\pi/2','2\pi'})
g=@(th) atan(-4.9/(w*v0*cos(th)));
f=@(th) v0^2*sin(4*th)/9.8-2*d^2*w^2*sin(2*th)/9.8+2*d*v0^2*cos(2*th)*
sin(g(th))+2+d*w*v0*cos(g(th)*(sin(2*th)*sin(th)-cos(2*th)+cos(th)));
th_m=fzero(f,[0,pi/2]);
phi_m=pi+g(th_m);
R=@(th,phi) sqrt(v0^4*sin(2*th)^2/9.8^2+d^2*(4*w^2*v0^2*cos(th)^2/9.8^2+1)+
2*d*v0^2*sin(2*th)*(sin(phi)-2*w*v0*cos(th)*cos(phi)/9.8)/9.8);
R_m=R(th_m,phi_m);
plot3(th_m,phi_m, z_m,'ro','markersize',3,'markerfacecolor','r')
line([th_m,th_m],[phi_m,phi_m],[0,z_m],'lineStyle','--')
disp([th_m*180/pi,phi_m*180/pi,R_m])
hold off
xlabel('\theta')
ylabel('\phi')
zlabel('R')
title('Alcance')
view(30,25)
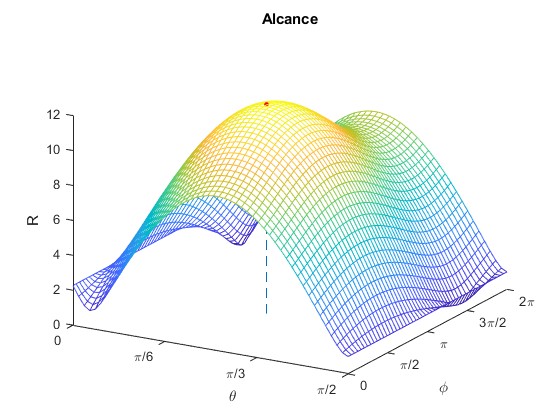
42.1230 146.5497 11.9668
Los ángulos de tiro par los cuales el alcance es máximo Rm=11.97 m, son θ=42.1° y φ=146.5°
Representamos la trayectoria para esta alcance
- Velocidad angular de rotación, ω=1 rad/s
- Distancia al eje de rotación, d=1 m
- Velocidad inicial, v0=10 m/s
- Angulos de tiro: con la vertical Z, θ= 0.7352, con el eje X, φ=2.5578.
Referencias
J. A. Weyland, J. D. Patterson. Rotating water sprinkler. Am. J. Phys. 44 (11) November 1976, pp. 1106-1109