

Movimiento relativo de rotación uniforme
Comenzamos esta página con un pequeño juego
Sea una plataforma circular horizontal, de radio R, que gira con velocidad angular constante ω, alrededor de un eje perpendicular a la plataforma y que pasa por su centro. Cerca de la plataforma hay una canasta O
Un jugador, situado en el centro, lanza una pelota con velocidad v, que desliza sobre la plataforma sin rozamiento en la dirección radial y deberá acertar a introducirla en la canasta.
En la figura se muestra la situación inicial, t=0, la canasta forma un ángulo φ, con la dirección inicial de la velocidad. Veremos que hay infinitas velocidades para encestar
En el instante t, la pelota se encuentra a una distancia vt del origen formando un ángulo ωt con el eje X. Las coordenadas de la partícula son
Se encesta en el instante t=R/v, tal que
Ejemplo: velocidad angular de rotación de la plataforma, ω=1 rad/s, radio de la plataforma R=1 m. Sea φ=π/6.
Las velocidades v de la pelota que encestan en la canasta son: 1.91, 0.147, 0.076, ... m/s
Actividades
Se introduce
- La posición angular φ de la canasta en grados
- La velocidad con la que se lanza la pelota desde el centro del disco en rotación
- El radio del disco se ha fijado en R=1 m
- La velocidad angular de rotación se ha fijado en ω=1 rad/s
Se pulsa el botón titulado Nuevo
Movimiento rectilíneo y uniforme
El dispositivo experimental consiste en un carrito que se mueve por una vía rectilínea con velocidad constante v, sobre una plataforma en rotación que gira con velocidad angular constante ω. El carrito dispone de un rotulador, o de un pequeño depósito de tinta, de modo que dibuja su trayectoria rectilínea en el Sistema de Referencia del laboratorio, sobre la plataforma en rotación.
Vector posición
Una partícula P se mueve a lo largo del eje X con velocidad constante v, sabiendo que en el instante inicial t=0, se encuentra en la posición x0, determinar la trayectoria en el sistema no inercial que gira con velocidad angular constante ω en el sentido de las agujas del reloj.
Sistema inercial
La posición de la partícula P en función del tiempo es
x=x0+vt
y=0.
El vector posición es
La trayectoria de la partícula es rectilínea
Sistema no inercial
x’=x·cos(ω·t)
y’=x·sin(ω·t)
El vector posición es
Si la partícula parte del origen en el instante t=0, x=v·t. La distancia r de la partícula al origen en el instante t es
El ángulo girado por el sistema no inercial al cabo de un cierto tiempo t es θ=ω·t
x0=0;
v=0.1; %velocidad de la partícula
w=2; %velocidad angular de rotación
x=@(t) (x0+v*t).*cos(w*t);
y=@(t) (x0+v*t).*sin(w*t);
fplot(x,y,[0,10])
grid on
axis equal
xlabel('x')
ylabel('y')
title('Movimiento relativo de rotación uniforme')
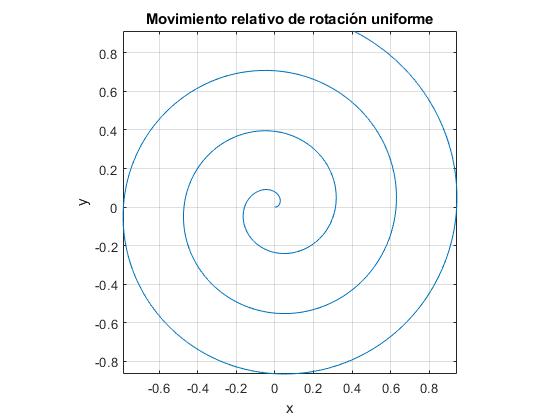
La ecuación de la trayectoria en coordenadas polares es una espiral de Arquímedes
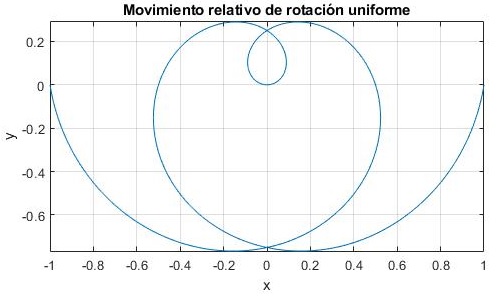
La partícula sale de la posición x0=-1, se mueve con velocidad v=1/π. Cuando la velocidad angular ω=2, la trayectoria es
x0=-1; %posición inicial
v=1/pi; %velocidad de la partícula
w=2; %velocidad angular de rotación, probar 1,3,4
x=@(t) (x0+v*t).*cos(w*t);
y=@(t) (x0+v*t).*sin(w*t);
fplot(x,y,[0,2*pi])
grid on
axis equal
xlabel('x')
ylabel('y')
title('Movimiento relativo de rotación uniforme')
Vector velocidad
Sistema inercial
La velocidad v de la partícula P es constante
Sistema no inercial
Derivando respecto del tiempo obtenemos la velocidad de la partícula medida en el sistema no inercial
Vamos a comparar este resultado con el que nos proporciona la fórmula (se justifica al final de la página)
Con
se obtiene
Ahora, relacionamos los vectores unitarios , del sistema de referencia OXY inercial con los vectores unitarios del sistema OX’Y’ no inercial
Obtenemos de nuevo, el vector velocidad
Vector aceleración
Sistema inercial
La velocidad v de la partícula P es constante en módulo y dirección
Sistema no inercial
Derivando las componentes de la velocidad con respecto del tiempo obtenemos la aceleración medida en el sistema no inercial.
Veamos ahora mediante la fórmula (se justifica al final de la página)
Los datos que tenemos son
, el movimiento es uniforme en el sistema de referencia inercial
Calculamos cada aceleración separadamente
Aceleración de Coriolis
En la figura, se muestra que la aceleración de Coriolis es siempre perpendicular a la velocidad . A la izquierda, se muestra el producto vectorial en el espacio, y a la derecha la misma representación en el plano.
Aceleración centrífuga
El resultado del triple producto vectorial es
La aceleración centrífuga tiene dirección radial.
Sumando las dos contribuciones volvemos a obtener la aceleración medida en el sistema no inercial
Actividades
Se introduce los siguientes datos:
- La velocidad angular de rotación ω, en el control titulado Velocidad angular
- la velocidad constante de la partícula v, en el control titulado Velocidad del móvil
- la posición inicial de la partícula x0, en el control titulado Posición inicial
Se pulsa el botón titulado Nuevo
Para ver la representación del vector velocidad, aceleración centrífuga y de Coriolis activar la casilla titulada Vectores.
Ejemplos
- Posición inicial, x0=0
- Velocidad del móvil, v=0.1
- Velocidad angular de rotación, ω=2
Otro ejemplo
- Posición inicial, x0=0.9
- Velocidad del móvil, v=x0/π=0.2865
- Velocidad angular de rotación, ω=2
Se detiene el movimiento cuando el móvil llegue a la posición diametralmente opuesta, x=0.9. Cambiar la velocidad angular a 1, 3, 4
Oscilaciones
Supongamos que una partícula describe un Movimiento Armónico Simple de frecuencia angular ωp en el Sistema de Referencia Inercial.
x=Acos(ωpt)
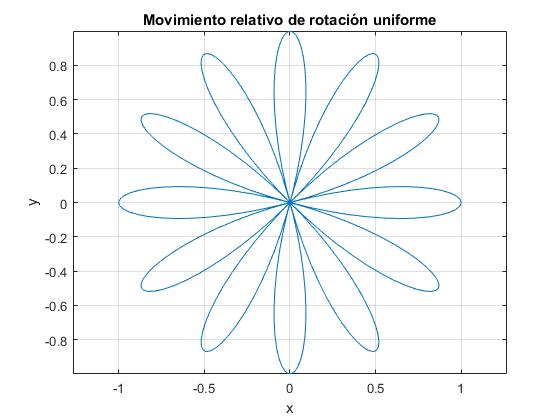
Se dibuja la trayectoria en el sistema no inercial OX’Y’ aplicando la transformación
x’=x·cos(ω t)=Acos(ωpt)·cos(ω t)
y’=x·sin(ω t)=Acos(ωpt)·sin(ω t)
Donde ω es la velocidad angular de rotación
En la figura, se muestra el ángulo girado por el plano de oscilación del "péndulo" durante el periodo de una oscilación. El péndulo parte de A y regresa a B, para iniciar una nueva oscilación. El ángulo girado es Δθ =ω·P. Siendo P=2π/ωp el periodo de una oscilación
wp=6;
w=1;
t=0:0.02:2*pi;
x=cos(wp*t).*cos(w*t);
y=cos(wp*t).*sin(w*t);
plot(x,y)
grid on
axis equal
xlabel('x')
ylabel('y')
title('Movimiento relativo de rotación uniforme')
Caso particular ω =ωp
Las ecuaciones paramétricas de la trayectoria son
Eliminamos el tiempo t de las ecuaciones paramétricas de la trayectoria y obtenemos la ecuación de una circunferencia centrada en el punto (A/2, 0) y de radio A/2.
Actividades
Se introduce
- La velocidad angular ω de rotación, un número entero, en el control titulado Velocidad angular
- La frecuencia angular ωp del MAS, un número entero, en el control titulado Frecuencia angular
Se pulsa el botón titulado Nuevo
Movimiento relativo de rotación uniforme
Comenzamos con la derivada con respecto del tiempo, de un vector de módulo constante
En el instante t, el vector posción es
En el instante t+dt, el vector posción es
El vector diferencia es el vector , que es tangente a la circunferencia de radio r·sinθ. Su módulo es
donde ω es la velocidad angular de rotación constante. En forma vectorial escribimos
Sistema de Referencia inercial, O XYZ
Vector posición, velocidad y aceleración
Sistema de Referencia no inercial O X'Y'Z'
Vector posición
Vector velocidad
Vector aceleración
El primer término es
El segundo término es
La suma de los tres términos es
Habitualmente, la velocidad angular es constante
Referencias
Lenka Czudková, Jana Musilová. Physics in a lift and on turntable. Phys. Educ. 35 (1) January 2000, pp. 22-29
Marcelo Alonso, Edward J. Finn. Física, Mecánica. Fondo Educativo Interamericano. 1976, pp. 126-128