

Relación entre las magnitudes angulares y lineales
De la definición de radián (unidad natural de medida de ángulos) obtenemos la relación entre el arco y el radio. Como vemos en la figura, el ángulo se obtiene dividiendo la longitud del arco entre su radio
Velocidad
Derivando s=rθ respecto del tiempo, obtenemos la relación entre la velocidad lineal y la velocidad angular
La dirección de la velocidad es tangente a la trayectoria circular, es decir, perpendicular a la dirección radial
Aceleración tangencial
Derivando esta última relación con respecto del tiempo obtenemos la relación entre la aceleración tangencial at y la aceleración angular.
Un móvil tiene aceleración tangencial, siempre que el módulo de su velocidad cambie con el tiempo.
Aceleración normal
El cálculo de la componente normal de la aceleración es algo más complicado. La aceleración normal está relacionada con el cambio de la dirección de la velocidad con el tiempo.
Supongamos un móvil que describe un movimiento circular uniforme.
- En el instante t la velocidad del móvil es , cuyo módulo es v, y cuya dirección es tangente a la circunferencia.
- En el instante t' la velocidad del móvil , que tiene el mismo módulo v, pero su dirección ha cambiado.
Calculemos el cambio de velocidad que experimenta el móvil entre los instantes t y t', tal como se ve en la figura. El vector tiene dirección radial y sentido hacia el centro de la circunferencia. Los triángulos de color rojo y de color azul de la figura son isósceles y semejantes por lo que establecemos la siguiente relación
Donde la cuerda Δs es el módulo del vector desplazamiento entre los instantes t y t'
Dividiendo ambos miembros entre el intervalo de tiempo Δt=t'-t
Cuando el intervalo de tiempo Δt tiende a cero, la cuerda Δs se aproxima al arco, y el cociente ds/dt nos da el módulo de la velocidad v del móvil,
La aceleración normal an tiene dirección radial y sentido hacia el centro de la circunferencia que describe el móvil y su módulo viene dado por una u otra de las expresiones siguientes:
Esta es la deducción más elemental de la fórmula de la aceleración normal que se basa en la identificación de la longitud del arco entre dos puntos de la circunferencia con la cuerda que pasa por dichos puntos, cuando ambos puntos están muy próximos entre sí.
Resumen
La dirección de la velocidad de un móvil en movimiento circular es tangente a la circunferencia que describe.
Un móvil tiene aceleración tangencial at siempre que cambie el módulo de la velocidad con el tiempo. El sentido de la aceleración tangencial es el mismo que el de la velocidad si el móvil acelera y es de sentido contrario, si se frena. Un móvil que describe un movimiento circular uniforme no tiene aceleración tangencial.
Un móvil que describe un movimiento circular siempre tiene aceleración normal, an ya que cambia la dirección de la velocidad con el tiempo. La aceleración normal tiene dirección radial y sentido hacia el centro de la circunferencia que describe.
La aceleración del móvil se obtiene sumando vectorialmente ambas componentes de la aceleración.
Ejemplo
Una rueda de r=0.1 m de radio está girando con una velocidad de ω0=4π rad/s, se le aplican los frenos y se detiene en 4s. Calcular
-
La aceleración angular
ω=ω0+αt
En el instante t=4 s la velocidad angular ω=0
α=-π rad/s2
El ángulo girado hasta este instante es
-
En el instante t=1 s, la posición y la velocidad angular del móvil es
θ=7π/2=2π+3π/2 rad
ω=4π+(-π)·1=3π rad/s
La velocidad lineal
v=ω·r v=0.3π m/s
-
La componente tangencial de la aceleración es
at=α·r at=-0.1π m/s2
La componente normal de la aceleración es
an=v2/r an=0.9π2 m/s2
Movimiento de un saltador sobre una plataforma que gira con velocidad angular constante.
Supongamos una plataforma que se mueve a lo largo del eje X con velocidad constante V. Una persona salta verticalmente sobre la plataforma en una determinada posición x0 y cae en la misma posición
Si v0 es la velocidad inicial del saltador, el tiempo T que tarda en regresar a la plataforma es T=2v0/g.
Desde el punto de vista del observador sobre la plataforma, el saltador parte de la posición x0 y regresa a la misma posición. Para el observador en tierra, el saltador parte de la posición x0 y regresa a la posición x0+VT
Vamos a analizar ahora, que sucede en una plataforma en rotación con velocidad angular ω constante.
Desde el punto de vista del observador en tierra, el saltador está situado inicialmente a una distancia r0 del eje de la plataforma giratoria haciendo un ángulo inicial θ0 con el eje X.
La velocidad del saltador es ωr0, cuya dirección es tangente a la circunferencia de radio r0. Una vez iniciado el salto, en el instante t=0, el saltador se mueve horizontalmente con esta velocidad y verticalmente, con velocidad v0-gt.
Después de un tiempo T=2v0/g regresa a la plataforma, a una distancia r1 del eje, haciendo un ángulo θ0+θ con el eje X, tal como se aprecia en la figura.
θ0 es el ángulo inicial de partida y θ es el ángulo entre las posiciones inicial y final del salto
que es independiente del radio r, es constante para todos los saltos
La hipotenusa del triángulo rectángulo es
Supongamos que el saltador una vez que impacta sobre la plataforma vuelve a saltar una y otra vez sin descanso. Al cabo de un número de n de saltos, se habrá caído de la plataforma de radio R.
Al terminar el segundo salto, en el instante 2T, el saltador se encontrará sobre la plataforma a una distancia r2 del eje haciendo un ángulo θ0+2θ
Al terminar el tercer salto, en el instante 3T, el saltador se encontrará sobre la plataforma a una distancia r3 del eje haciendo un ángulo θ0+3θ
Al terminar el salto k, en el instante kT, el saltador se encontrará sobre la plataforma a una distancia rk del eje haciendo un ángulo θ0+k·θ
Suponiendo que el saltador parte del eje X, θ0=0, el saltador inicia el salto k+1 en el punto de coordenadas polares (rk, k·θ)
El movimiento posterior se realiza a lo largo de la tangente a la circunferencia de radio rk con velocidad ω·rk, las coordenadas en el plano horizontal del saltador mientras se encuentra suspendido en el aire, serán
En el instante t=(k+1)T, el saltador regresa a la plataforma y finaliza el salto k+1. Las coordenadas del punto de impacto son
Al terminar el salto n, el saltador se caerá de la plataforma
n será el entero mayor que el cociente
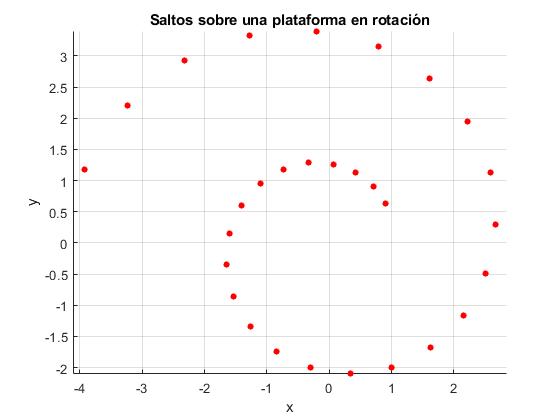
Representamos las posiciones iniciales de cada uno de los saltos hasta que cae de la plataforma, con los siguientes datos:
- Radio de la plataforma, R=4 m
- Velocidad angular de rotación, ω= 3 rpm
- Distancia inicial del saltador al eje de rotación, r0= 1 m
- Tiempo de salto, mientras el saltador está suspendio en el aire, T= 1 s
R=4; %radio de la plataforma
T=1; %tiempo del salto
r0=1; %distancia inicial al eje de rotación
w=3*2*pi/60; %velocidad angular de rotación
th=atan(w*T);
n=floor(2*(log(R)-log(r0))/log(1+(w*T)^2)); %número de saltos
hold on
for k=0:n
r=r0*(1+(w*T)^2)^(k/2); %distancia al eje de rotación
x=r*cos(k*th); %coordenadas
y=r*sin(k*th);
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
end
hold off
axis equal
grid on
xlabel('x')
ylabel('y')
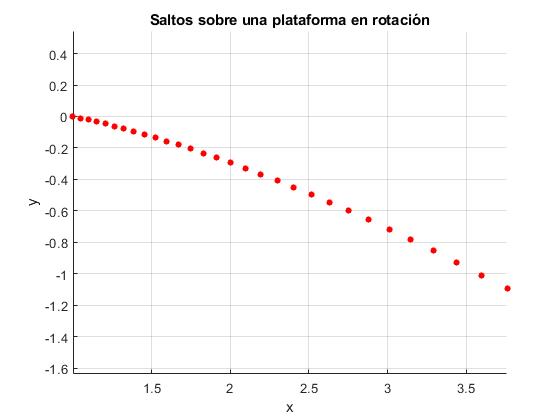
title('Saltos sobre una plataforma en rotación')
Observador sobre la plataforma
Al terminar el salto k, en el instante kT, el saltador se encontrará sobre la plataforma a una distancia rk del eje haciendo un ángulo k·θ con el eje X, mientras tanto la plataforma habrá girado un ángulo k·ωT. La posición relativa del punto de impacto respecto de la plataforma será
Representamos las posiciones de impacto (xk, yk) vistas por un observador ligado a la plataforma
R=4; %radio de la plataforma
T=1; %tiempo del salto
r0=1; %distancia inicial al eje de rotación
w=3*2*pi/60; %velocidad angular de rotación
th=atan(w*T);
n=floor(2*(log(R)-log(r0))/log(1+(w*T)^2)); %número de saltos
hold on
for k=0:n
r=r0*(1+(w*T)^2)^(k/2); %distancia al eje de rotación
x=r*cos(k*(th-w*T));
y=r*sin(k*(th-w*T));
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
end
hold off
axis equal
grid on
xlabel('x')
ylabel('y')
title('Saltos sobre una plataforma en rotación')
El saltador no se mueve en la dirección radial
Actividades
Se introduce
- La velocidad angular ω de la plataforma en rpm, en el control titulado Velocidad angular
- El tiempo T del salto, mientras el saltador se encuentra suspendido en el aire, en el control titulado Tiempo suspendido
- Se ha fijado el radio de la plataforma, R=4 m
- Se ha fijado la distancia inicial del saltador al eje de rotación, r0= 1 m
Se pulsa el botón titulado Nuevo
En la parte superior izquierda, se proporcionan los datos de
- El tiempo, t en s
- Las distancias al eje de rotación, rk en m
- El número de saltos completos
Los puntos de color rojo indican las posiciones de partida del saltador sobre la plataforma. El punto de color azul, muestra al saltador suspendido en el aire, mientas efectúa el salto. Una flecha señala la dirección de la velocidad horizontal del saltador, perpendicular a la dirección radial en el momento en el que se inicia el salto
Referencias
Terrence Toepker. Jumping Off a Merry-Go-Round. The Physics Teacher. Vol. 60, March 2022. pp. 176-178