

Movimiento relativo de rotación uniforme
Sea S'un sistema de referencia inercial X',Y',Z' y sea S un sistema de referencia X,Y,Z en rotación. Los orígenes de ambos sistemas de referencia coinciden así como los ejes Z y Z'.
Vamos a utilizar coordenadas esféricas de modo que la posición de un punto P en el sistema S es (r, φ, θ) y el sistema inercial S' es (r', φ', θ'). Dado que el origen de S y S' es el mismo r=r', y como los ejes Z y Z' coinciden θ=θ'. Los ángulos φ y φ' están relacionados por φ'=φ+Ωt
La posición de P en el sistema inercial S' y en el sistema S en rotación son, respectivamente
Como vemos z'=z. Relacionamos utilizando notación compleja x',y' con x,y
El resultado es
Derivando con respecto del tiempo relacionamos las componentes de la velocidad en ambos sistemas de referencia
Calculamos el cuadrado del módulo de la velocidad para obtener la expresión de la energía cinética T'=mv'2/2 en términos de la energía cinética T=mv2/2 en el sistema S
Sea V(x,y,z) la energía potencial de la partícula en el sistema S o V(x',y',z') en el sistema inercial S'
La lagrangiana L=T'-V de la partícula en el sistema inercial S' es
Ecuaciones del movimiento
- Ecuación del movimiento a lo largo del eje X
- Ecuación del movimiento a lo largo del eje Y
- Ecuación del movimiento a lo largo del eje Z
Las tres ecuaciones se pueden expresar en una sola ecuación vectorial:
La velocidad angular de rotación , es un vector que tiene la dirección del eje Z, sentido la regla del sacacorchos,
El primer término es la fuerza aplicada, el segundo término es la fuerza de Coriolis y el tercer término la fuerza centrífuga.
La fuerza centrífuga tiene dirección radial, es la responsable del incremento del radio de la trayectoria y la fuerza de Coriolis es perpendicular a la velocidad es responsable de su curvatura.
Movimiento de una partícula a lo largo del eje X
El ejemplo más sencillo es el de una partícula se lanza con velocidad v0 desde el origen a lo largo del eje X sobre una plataforma en rotación con velocidad angular constante Ω. Vamos a determinar la trayectoria vista por el observador inercial.
En este caso V(x,y,z)=0. El movimiento tiene lugar en el plano XY de la plataforma. Las ecuaciones del movimiento son
Utilizando notación compleja
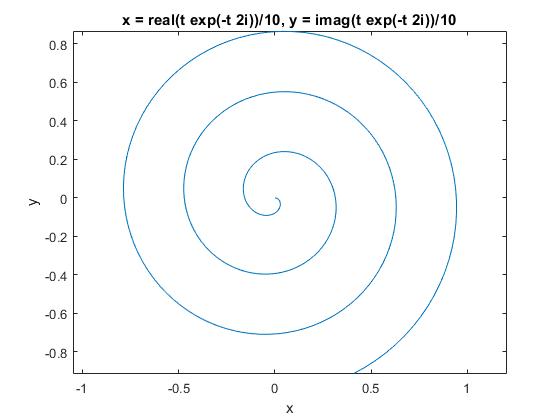
Resolvemos la ecuación diferencial utilizando la función MATLAB
>> syms W x;
>> z=dsolve('D2x+2*1i*W*Dx-W^2*x=0','Dx(0)=0.1','x(0)=0');
>> z=subs(z,W,2);
>> ezplot(real(z),imag(z),[0,10])
Las raíces de la ecuación característica son
La solución de esta ecuación diferencial lineal con raíces repetidas es
Donde C y D son números complejos cuya parte real e imaginaria se determinan a partir de las condiciones iniciales:
El resultado es
Las expresiones de x e y en función del tiempo son:
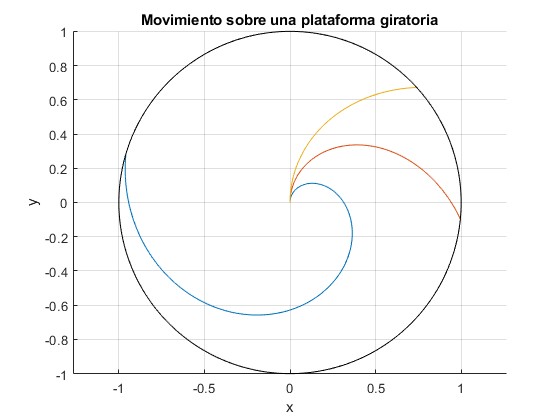
Una plataforma de radio R=1, gira con velocidad angular Ω=0.5 rad/s. Las partículas parten del origen con velocidades v0x=0, y v0y=0.1, 0.3, 0.6 m/s, respectivamente
El programa calcula el instante en el que la partícula alcanza el borde de la plataforma, mediante la función
W=0.5; %velocidad angular de rotación
v0x=0;
x0=0; %posición inicial (origen)
R=1; %radio de la plataforma
hold on
for v0y=[0.1,0.3,0.6]
x=@(t) (x0+v0x*t).*cos(W*t)+(v0y+W*x0)*t.*sin(W*t);
y=@(t) -(x0+v0x*t).*sin(W*t)+(v0y+W*x0)*t.*cos(W*t);
r=@(t) sqrt(x(t).^2+y(t).^2);
g=@(t) r(t)-R;
tf=fzero(g,[1,50]);
fplot(x,y,[0,tf])
end
fplot(@(th) cos(th), @(th) sin(th),[0,2*pi],'color','k') %plataforma
hold off
axis equal
grid on
xlabel('x')
ylabel('y')
title('Movimiento sobre una plataforma giratoria')
Obtenemos la misma trayectoria que en la página Movimiento relativo de rotación uniforme
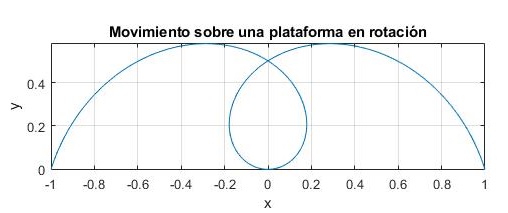
Otro ejemplo estudiado en la misma página. La partícula sale de la posición A, x0=-R, y0=0, y llega a B (R, 0) después de un tiempo t=2π/Ω
Las condiciones finales en B en el instante t=2π/Ω implican las dos relaciones
Las condiciones iniciales en A el instante t=0, implican
Cr=-R, Ci=0, Di=0, por lo que v0sinα=ΩR. La velocidad del móvil respecto al Sistema de Referencia Intercial tiene la dirección del diámetro AB. La posición (x,y) en función del tiempo t es
R=1; %radio del disco
W=1; %velocidad angular de rotación
x=@(t) R*(W*t/pi-1).*cos(W*t);
y=@(t) -R*(W*t/pi-1).*sin(W*t);
fplot(x,y,[0,2*pi])
axis equal
grid on
xlabel('x')
ylabel('y')
title('Movimiento sobre una plataforma en rotación')
Movimiento de una partícula unida a un muelle elástico
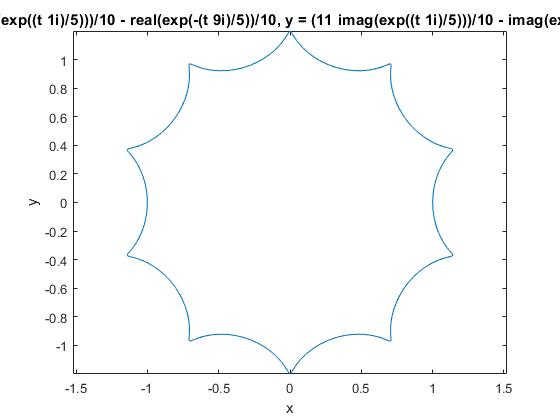
Vamos a estudiar el comportamiento de una partícula de masa m unida a uno de los extremos de un muelle elástico de constante k mientras que el otro está sujeto al eje de la plataforma en rotación. Si el muelle está sobre la plataforma, en el plano XY, la energía potencial del muelle será
Las ecuaciones del movimiento para este sistema son
La trayectoria de la partícula está confinado al plano XY de la plataforma en rotación. Utilizando notación compleja ξ=x+iy
Resolvemos la ecuación diferencial utilizando la función MATLAB
Probamos el siguiente ejemplo:
- Velocidad angular de rotación, Ω=0.8
- Frecuencia angular (vibración) k/m=ω2=1
- Posición inicial, ξ0=1
- Velocidad inicial, (dξ/dt)0=0.4·i
>> syms w W x;
>> z=dsolve('D2x+2*1i*W*Dx+(w^2-W^2)*x=0','Dx(0)=0+0.4*1i','x(0)=1+0*1i');
>> z=subs(z,{w,W},{1,0.8});
>> ezplot(real(z),imag(z),[0,40])
Las raíces de la ecuación característica
La solución de la ecuación diferencial es
Donde C y D son números complejos cuya parte real e imaginaria se determinan a partir de las condiciones iniciales:
El resultado es
La posición de la partícula en la plataforma, sus coordenadas x e y en función del tiempo t son:
Donde Cr es la parte real del coeficiente C, Ci es la parte imaginaria y lo mismo cabe decir del coeficiente D
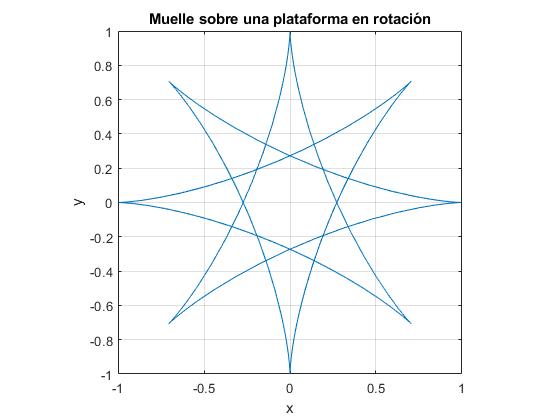
Probamos el siguiente ejemplo:
- Velocidad angular de rotación, Ω=0.25
- Frecuencia angular (vibración) k/m=ω2=1
- Posición inicial, x0=1, y0=0
- Velocidad inicial, v0x=0, v0y=0
w=1; %sqrt(k/m)
W=0.25; %velocidad rotación
x0=1; %posición inicial
y0=0;
vx0=0; %velocidad inicial
vy0=0;
%coeficientes
C=((1+W/w)*x0+vy0/w+1i*((1+W/w)*y0-vx0/w))/2;
D=((1-W/w)*x0-vy0/w+1i*((1-W/w)*y0+vx0/w))/2;
x=@(t) real(C)*cos((w-W)*t)+real(D)*cos((w+W)*t)-imag(C)*sin((w-W)*t)+
imag(D)*sin((w+W)*t);
y=@(t) imag(C)*cos((w-W)*t)+imag(D)*cos((w+W)*t)+real(C)*sin((w-W)*t)-
real(D)*sin((w+W)*t);
fplot(x,y,[0,40])
grid on
axis equal
xlabel('x')
ylabel('y')
title('Muelle sobre una plataforma en rotación')
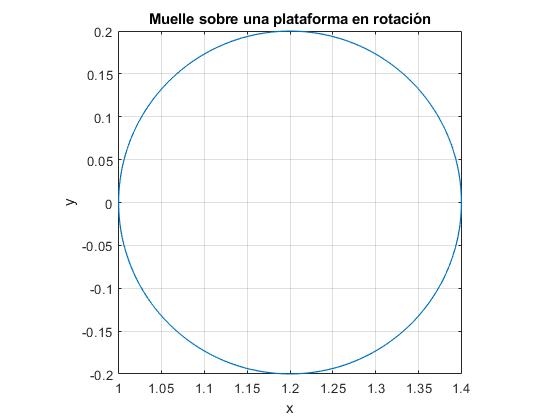
Trayectoria circular
Cuando y0=0, y v0x=0, Ci=0, y Di=0.
La trayectoria es circular centrada en el origen (0,0) cuando Cr=0, o Dr=0,
w=1; %sqrt(k/m)
W=0.7; %velocidad rotación
x0=1; %posición inicial
y0=0;
vx0=0; %velocidad inicial
vy0=-(w+W)*x0;
%coeficientes
Cr=(1+W/w)*x0+vy0/w;
Dr=(1-W/w)*x0-vy0/w;
x=@(t) Cr*cos((w-W)*t)+Dr*cos((w+W)*t);
y=@(t) Cr*sin((w-W)*t)-Dr*sin((w+W)*t);
fplot(x,y,[0,40])
grid on
axis equal
xlabel('x')
ylabel('y')
title('Muelle sobre una plataforma en rotación')
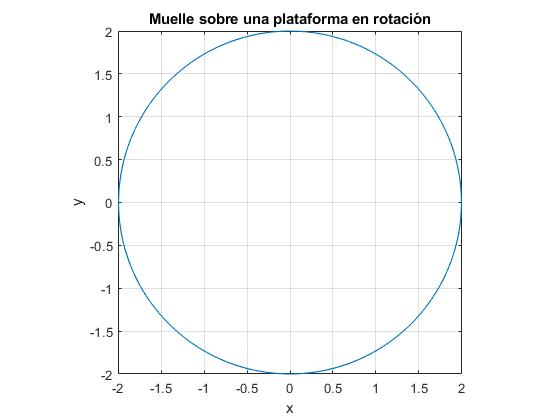
Cuando Ω=ω la trayectoria es circular
Elevando al cuadrado y sumando
Con los datos del ejemplo, Cr=1.2, Ci=0, (centro de la circunferencia). Dr=-0.2, Di=0, el radio es 0.2
Actividades
Especificamos los parámetros del sistema
- La velocidad angular de rotación, el control titulado Velocidad rotación Ω
- El cociente ω2=k/m, donde k es la constante del muelle y m la masa de la partícula se ha fijado en ω=1
Especificamos las condiciones iniciales
- La posición inicial x0 e y0, en los controles titulados Posición, X y Posición, Y
- La velocidad inicial (dx/dt)0 e (dy/dt)0, en los controles titulados Velocidad, X y Velocidad, Y
Si la trayectoria aparece grande o se ve pequeña, se puede reducir o aumentar la escala para ajustarla a la ventana gráfica, en el control titulado Escala
Se sugiere al lector probar los siguientes casos: Ω=1, y Ω=0.2
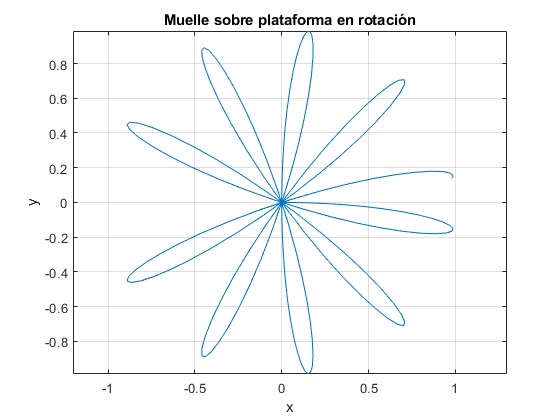
La velocidad angular de rotación Ω no es constante
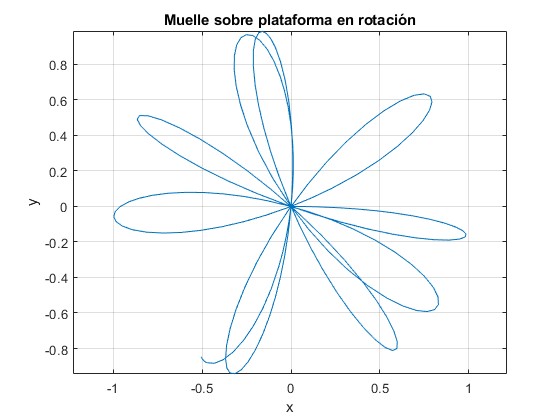
Cuando la velocidad angular de rotación Ω no es constante, hay que añadir una fuerza de inercia más, denominada fuerza de Euler
Sobre la partícula actúan: la fuerza que ejerce el muelle, la fuerza de Coriolis, la centrífuga y la de Euler. La ecuación del movimiento de la partícula es
Para una partícula unida a un muelle elástico, hay que resolver el sistema de dos ecuaciones diferenciales
Los dos términos adicionales y·dΩ/dt y x·dΩ/dt corresponden a la fuerza de Euler
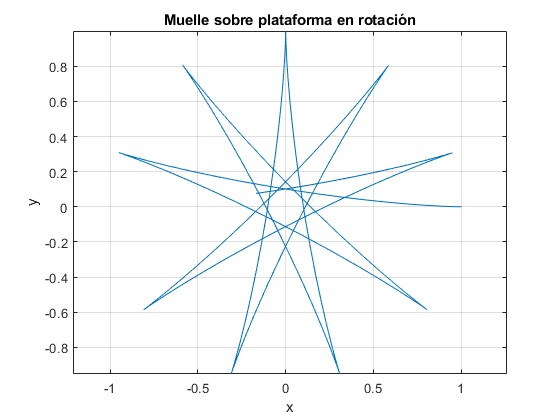
Supongamos que la velocidad angular de rotación varía linealmente con el tiempo, Ω=Ω0+kt.
Resolvemos numéricamente el sistema de dos ecuaciones diferenciales utilizando el procedimiento
W0=0.1; %velocidad angular de rotación
w=1; %frecuencia angular
k=5e-3;
%x(1) es x, x(2) es dx/dt, x(3) es y y x(4) es dy/dt
fg=@(t,x)[x(2); ((W0+k*t)^2-w^2)*x(1)+2*(W0+k*t)*x(4)+k*x(3); x(4);
((W0+k*t)^2-w^2)*x(3)-2*(W0+k*t)*x(2)-k*x(1)];
[~,x]=ode45(fg,[0,30],[1, 0, 0, 0]);
plot(x(:,1),x(:,3))
axis equal
grid on
xlabel('x')
ylabel('y');
title('Muelle sobre plataforma en rotación')
k=0. Sin fuerza de Euler
k=0.005. Con fuerza de Euler
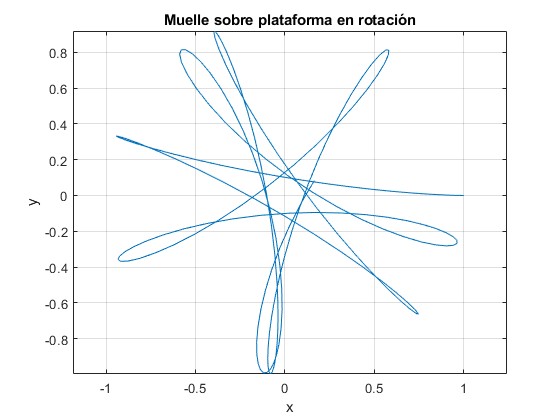
Cambiamos las condiciones iniciales, para t=0, x=0, dx/dt=1, y=0, dy/dt=0
k=0. Sin fuerza de Euler
k=0.005. Con fuerza de Euler
Referencias
J Barcelos-Neto, M B Dias da Silva. An example of motion in a rotating frame. Eur. J. Phys. 10 (1989) pp. 305-308
Vladimir Ivchenko. On the "Forgoten" Euler Inertial Force. Resonance, Volume 29, Issue 6, June 2024. pp. 815-823