

Péndulo eléctrico
El sistema está formado por una partícula de masa m y carga q unida a un hilo inextensible de longitud l. A una distancia d por debajo de la posición θ=0 hay una carga fija Q que puede ser positiva (color rojo) o negativa (color azul).
Equilibrio y estabilidad
La energía potencial tiene dos contribuciones: la energía potencial gravitatoria y la energía potencia correspondiente a la interacción entre las dos cargas. Cuando la posión angular del péndulo es θ, las distancia entre las cargas es r
Expresamos la energía potencial por unidad de masa, en términos de dos parámetros, b y c
El parámetro c>1, ya que . El parámetro k y por tanto, b es positivo, si las cargas son del mismo signo y negativo si son de signo contrario
Las posiciones de equilibrio son
Para determinar si estas psiciones son estables (mínimo) o inestables (máximo), calculamos la derivada segunda
Para k<0 ó b<0 (cargas de distinto signo)
Para θ=0 (mínimo), estable
Para θ=π (máximo), inestable
Para k>0 ó b>0 (cargas del mismo signo)
Para θ=0
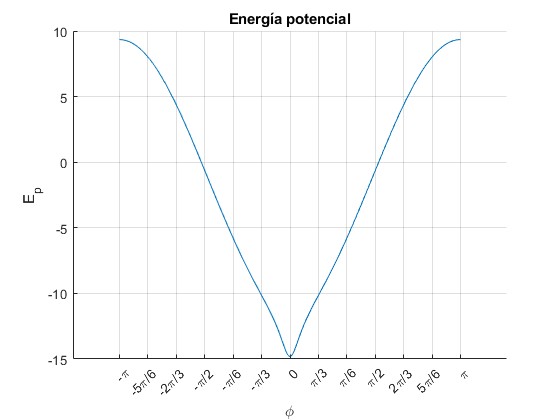
Representamos la función energía potencial para, k=-1, la distancia entre las cargas para θ=0 es d=0.2 m, la longitud del péndulo es l=1 m
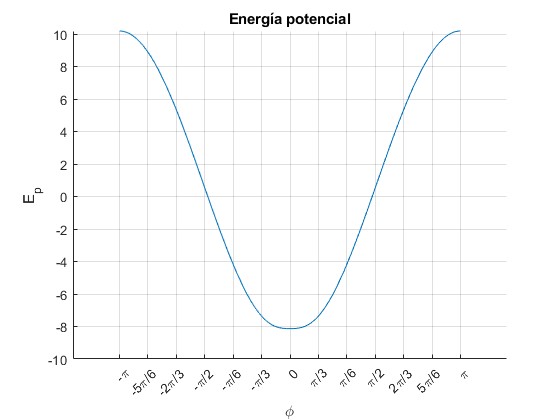
Representamos la función energía potencial para, k=1, la distancia entre las cargas para θ=0 es d=0.6 m, la longitud del péndulo es l=1 m
Representamos la función energía potencial para, k=1, la distancia entre las cargas para θ=0 es d=0.1 m, la longitud del péndulo es l=1 m
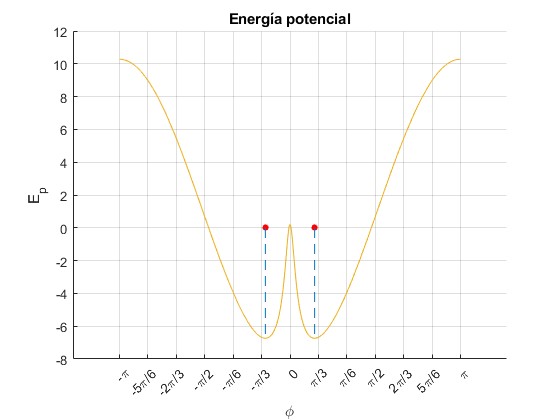
Fijada la longitud del péndulo l=1 y el parámetro k=1, existe una distancia crítica dc, por debajo de la cual d<dc la posición θ=0, es inestable y por encima d>dc, es estable. Véase las dos figuras
La distancia crítica es la raíz real positiva de la ecuación cúbica, dc= 0.5396 m
>> l=1; >> k=1; >> roots([9.8,0,-k,-k*l]) ans = 0.5396 + 0.0000i -0.2698 + 0.3411i -0.2698 - 0.3411i
Para θ=π
Fijada la longitud del péndulo l=1 y el parámetro k=1, buscamos una nueva distancia crítica dc.
>> l=1; >> k=1; >> roots([1,6*l, (12*l^2-k/9.8),8*l^3-k*l/9.8]) ans = -2.5396 + 0.0000i -1.7302 + 0.3411i -1.7302 - 0.3411i
No hay raíz real positiva de la ecuación cúbica. La posición θ=π corresponde a un máximo (inestable), como se aprecia en las representaciones gráficas
Para d<dc hay dos posiciones angulares dadas por la ecuación, ,iguales pero de signo contrario, señaladas por dos puntos de color rojo en la figura
No ha sido posible demostrar que ambas corresponden a mínimos de la energía potencial (posiciones de equilibrio estable), tal como se aprecia en las figuras
El código para representar las dos figuras anteriores es el siguiente
l=1; %longitud del péndulo
d=0.1; %distancia entre cargas para th=0
k=1; %parámetro
b=k/sqrt(2*(l+d)*l);
c=((l+d)^2+l^2)/(2*(l+d)*l);
hold on
if k>0
rr=roots([9.8,0,-k,-k]);
for r=rr'
if isreal(r)
d_c=r;
break;
end
end
if d<d_c
th_1=acos(c-(b/(2*9.8*l))^(2/3));
plot(th_1,0,'ro','markersize',4,'markerfacecolor','r')
plot(-th_1,0,'ro','markersize',4,'markerfacecolor','r')
line([th_1,th_1],[0,f(th_1)],'lineStyle','--')
line([-th_1,-th_1],[0,f(th_1)],'lineStyle','--')
end
end
f=@(x) -9.8*l*cos(x)+b./sqrt(c-cos(x));
fplot(f,[-pi,pi])
set(gca,'XTick',-pi:pi/6:pi)
set(gca,'XTickLabel',{'-\pi', '-5\pi/6','-2\pi/3','-\pi/2','-\pi/6','-\pi/3',
'0','\pi/3','\pi/6','\pi/2','2\pi/3','5\pi/6','\pi'})
hold off
grid on
xlabel('\phi')
ylabel('E_p')
title('Energía potencial')
Ecuación del movimiento
La energía cinética de la partícula es
La energía potencial
Como las fuerzas sobre la partícula de masa m y carga q son conservativas, la energía permanece constante
La lagrangiana es
La ecuación del movimiento es
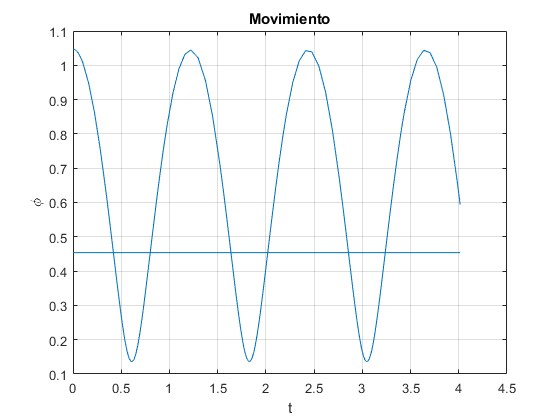
El caso más interesante se produce cuando k=1, (cargas del mismo signo) y d<dc, la distancia entre las cargas es menor que la crítica
Estudiamos el caso
- La longitud del pendulo, l=1 m
- El parámetro k=1 (cargas del mismo signo)
- Distancia crítica, dc=0.5396 m
- Distancia entre las cargas para θ=0, d=0.1 m
- Posición inicial θ0=π/3 (60°)
- Velocidad angular inicial, (dθ/dt)0=0
La energía de la partícula es, E/m=-3.9508
La energía potencial para θ=0, es Ep(0)=0.2
La partícula oscila alrededor de la posición de equilibrio estable,
θ1=26°, señalada por una recta horizontal en la figura
Resolvemos la ecuación diferencial con las condiciones iniciales especificadas, por el procedimiento
l=1; %longitud del péndulo
d=0.1; %distancia entre cargas para th=0
k=1; %parámetro
b=k/sqrt(2*(l+d)*l);
c=((l+d)^2+l^2)/(2*(l+d)*l);
tf=2*2*pi/sqrt(9.8/l);
th_1=acos(c-(b/(2*9.8*l))^(2/3));
f=@(t,x) [x(2);-9.8*sin(x(1))/l+b*sin(x(1))/(2*l^2*(c-cos(x(1)))^(3/2))];
[t,x]=ode45(f,[0,tf],[pi/3,0]);
plot(t,x(:,1))
line([0,tf],[th_1,th_1])
grid on
ylabel('\phi')
xlabel('t')
title('Movimiento')
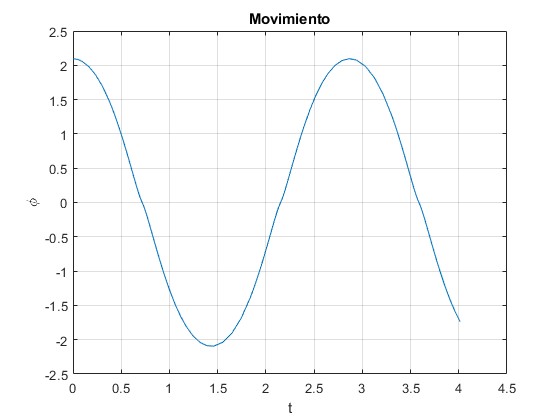
Cambiamos la posición inicial θ0=2π/3 (120°)
La energía de la partícula es, E/m= 5.4496, mayor que Ep(0)=0.2
La partícula oscila alrededor de la posición de equilibrio estable θ=0, tal como se aprecia en la figura
Actividades
Se introduce
- El signo del parámetro k, positivo si las cargas son del mismo signo y negativo si son de signo contrario, en el contrro titulado Cargas
- La distancia entre las dos cargas para θ=0, en el control titulado Distancia
- La posición angular inicial θ0 en grados, en el contro titulado Angulo
- Se ha fijado la velocidad angular inical, parte del reposo
- El valor del parámetro, k=1
- La longitud del péndulo, l= 1 m
Se pulsa el botón titulado Nuevo
Referencias
O. Aguilar Loreto, A. Muñoz, A. Jiménez Pérez. Dynamics for an electric pendulum. Revista Mexicana de Física E 65 (2019) 213–217