

Trayectorias de persecución (II)
En primer lugar, volvemos a revisar el problema original, del torpedo a la caza de un submarino, o del barco pirata al asalto de un barco mercante, para que puedan compararse las dos soluciones al mismo problema
La luz se propaga con velocidad infinita
El barco mercante se mueve a lo largo de la línea recta x=x0 con velocidad constante Vm partiendo del punto (x0,0) en el instante t=0. Mientras, el barco pirata parte del origen con velocidad constante Vp
En el instante t, el barco mercante se encuentra en la posición (x0, Vmt). En dicho instante, el barco pirata se encuentra en la posición (x,y), su vector velocidad (cuya dirección es tangente a la trayectoria) apunta al barco mercante
El barco pirata recorre con velocidad constante Vp el camino que une el origen con el punto (x,y) en un tiempo t. La longitud del camino es
Sustituimos el tiempo t en la primera ecuación. Denominamos p=dy/dx
Derivamos respecto de x
Integramos esta ecuación diferencial, sabiendo que para x=0, p=dy/dx=0
Integramos, sabiendo que el pirata parte del origen x=0, y=0
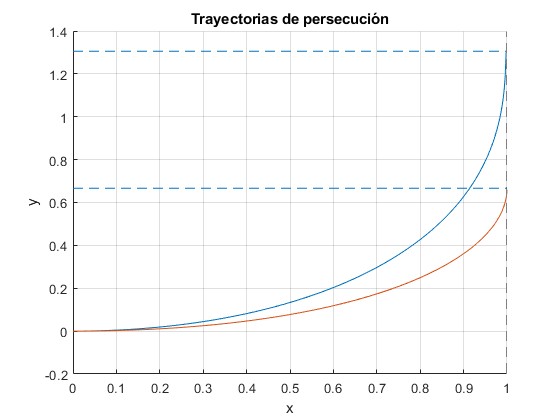
Representamos las trayectorias de persecución para dos valores del parámetro α=0.7 y 1.5
x0=1;
hold on
for a=[1.5,0.7]
f=@(x) x0*((1-x/x0).^(1+a)/(1+a)-(1-x/x0).^(1-a)/(1-a))/2+a*x0/(1-a^2);
fplot(f,[0,x0])
end
line([0,x0], [f(x0),f(x0)], 'lineStyle','--')
hold off
grid on
ylim([0,5])
xlabel('x')
ylabel('y')
title('Trayectorias de persecución')
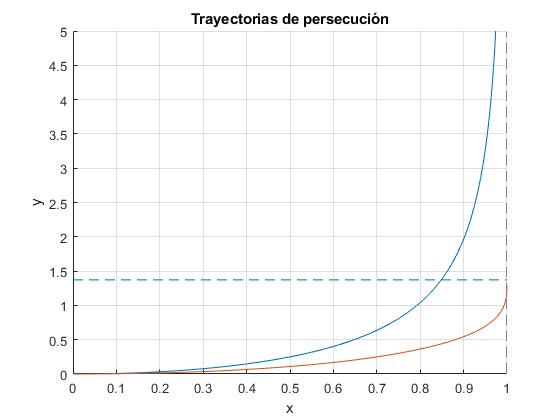
Para α≥1, no hay encuentro, y→∞ cuando x→x0
Para α=0.7, el encuentro entre los dos barcos se produce para y=1.4 aproximadamente
>> f(x0) ans = 1.3725
la luz se propaga con velocidad finita
Sustituimos los barcos por naves espaciales, supongamos que la velocidad de propagación de la luz c ya no es infinita sino comparable a las velocidades Vm y Vp de las dos naves espaciales. Sin embargo, analizaremos el problema en el marco de la mecánica Newtoniana
El aspecto fundamental de este problema es que en un instante t, el vector velocidad de la nave pirata apunta en la dirección en la que ve a la nave mercante. Como a la señal luminosa emitida por la nave mercante le lleva un tiempo en alcanzar la nave pirata, su posición habrá cambiado.
La posición de la nave pirata es en el instante t, cuando recibe la señal y la posición de la nave mercante es cuando la emitió en un instante anterior tr. Si la señal se propaga con velocidad c, el tiempo entre la emisión y recepción de la señal es t-tr
Situación inicial
El instante t=0, la señal emitida por la nave mercante alcanza la nave pirata situada en el origen. Como la primera señal viaja una distancia x0, la posición de la nave mercante en dicho instante es (x0, Vmx0/c).
Situación en el instante t
En el instante t la nave mercante está situada en el punto (x0, ym(t)), con
El vector velocidad de la nave pirata apunta en la dirección en la que ve a la nave mercante, (la posición de la nave mercante ym(tr) en el instante tr en la que emitió la señal). La dirección del vector velocidad es tangente a la trayectoria de persecución
que junto con la definición del tiempo tr,
definen la trayectoria de persecución teniendo en cuenta la velocidad finita de propagación de la luz. Para ello, tenemos que eliminar el tiempo tr del sistema de dos ecuaciones
En la primera ecuación, despejamos ym(tr)-y
Introducimos en la segunda
Despejamos tr en la primera ecuación y sustituimos en ésta última
El barco pirata recorre con velocidad constante Vp un camino que une el origen con el punto (x,y) en un tiempo t. La longitud del camino es
Introducimos el tiempo t en la última ecuación
Derivando respecto de x
Caso particular: cuando β→0 (la velocidad de propagación de la luz se hace infinita), recuperamos la ecuación diferencial de la trayectoria de persecución del primer apartado
Integramos la última ecuación, sabiendo que para x=0, p=dy/dx=0
Ahora, tenemos una función implícita de x en función de p=dy/dx. No podemos despejar dy/dx e integrar de forma analítica o numérica con la condición inicial de que la nave pirata parte del origen, x=0, y=0.
Para obtener la ecuación de la trayectoria de persecución, y=f(x) procedemos del siguiente manera:
Despejamos x=x(p)
Creamos una tabla de datos x, p que guardaamos en los vectores
pp yxx
x0=1;
a=0.5; %alfa
b=0.8; %beta
%tabal de valors x, p
f=@(p) 1-1./((1+p.^2).^(a*b/2).*(p+sqrt(1+p.^2)).^(1/(a*(1+b))));
pp=0:0.1:100;
xx=f(pp);
Utilizamos un procedimiento de integración numérica. En este caso, se ha elegido el método Simpson 1/3
function suma=simpson(ff,x0,xf,n)
%n número par de intervalos, n+1 número de puntos en el vector
x=linspace(x0,xf,n+1);
h=x(2)-x(1);
suma=ff(x(1))+ff(x(n+1));
for i=2:2:n
suma=suma+4*ff(x(i));
end
for i=3:2:n-1
suma=suma+2*ff(x(i));
end
suma=suma*h/3;
end
end
Para un valor de x que no esté en la tabla, el correspondiente valor de p se determina mediante interpolación lineal utilizando la función
function y=curva(x)
y=interp1(xx,pp,x,'linear');
end
Representamos la trayectoria de persecución para α=0.5 y β=0.8, tomando x0=1. Se compara con la trayectoria de persecución cuando la velocidad c tiende a infinito, β→0, deducida en el primer apartado
function persecucion_9
x0=1;
a=0.5; %alfa
b=0.8; %beta
%tabal de valors x, p
f=@(p) 1-1./((1+p.^2).^(a*b/2).*(p+sqrt(1+p.^2)).^(1/(a*(1+b))));
pp=0:0.1:100;
xx=f(pp);
x1=0:0.002:x0-0.002;
y1=zeros(length(x1),1);
k=1;
for xk=x1
y1(k)=simpson(@curva, 0,xk,50);
k=k+1;
end
hold on
plot(x1,y1)
line([0,x0],[y1(end),y1(end)],'lineStyle','--')
%instantánea
f=@(x) x0*((1-x/x0).^(1+a)/(1+a)-(1-x/x0).^(1-a)/(1-a))/2+a*x0/(1-a^2);
fplot(f,[0,x0])
line([0,x0],[f(x0),f(x0)],'lineStyle','--')
hold off
grid on
xlabel('x')
ylabel('y')
title('Trayectorias de persecución')
function y=curva(x)
y=interp1(xx,pp,x,'linear');
end
function suma=simpson(ff,x0,xf,n)
%n número par de intervalos, n+1 número de puntos en el vector
x=linspace(x0,xf,n+1);
h=x(2)-x(1);
suma=ff(x(1))+ff(x(n+1));
for i=2:2:n
suma=suma+4*ff(x(i));
end
for i=3:2:n-1
suma=suma+2*ff(x(i));
end
suma=suma*h/3;
end
end
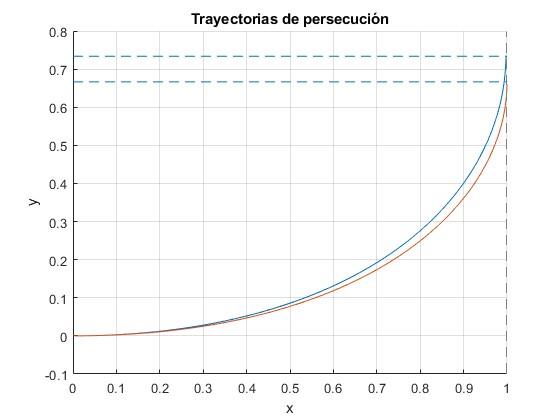
Cuando la velocidad c es muy grande y β es muy pequeño. Por ejemplo, α=0.5 y β=0.1. Ambas trayectorias casi se superponen
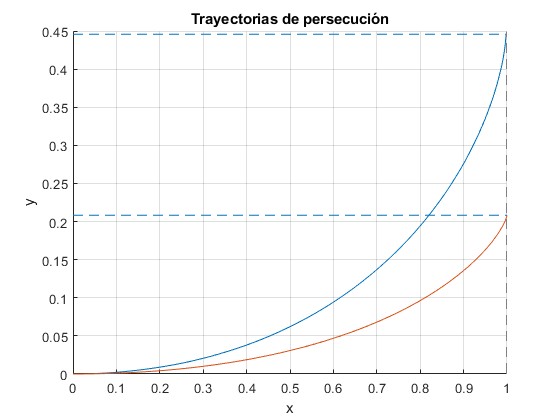
Un último ejemplo, α=0.2 y β=0.99
Referencias
Thales Azevedo, Anderson Pelluso. Space pirates: A pursuit curve problem involving retarded time. Am. J. Phys. 90 (10), October 2022. pp. 730-735