

Sistemas de ecuaciones lineales con MATLAB
Determinante
Un determinante es un número asociado a una matriz cuadrada. Para una matriz cuadrada de dimensión 2×2
El determinante de una matriz m×m se desarrolla en términos de una combinación de determinates de matrices de dimensión m-1×m-1 y así, sucesivamente, hasta llegar a los determinantes de matrices 2×2.
Por ejemplo, el determinante de una matriz 3×3 es
El determinante se calcula mediante la siguiente fórmula
Donde M1j es una submatriz obtenida eliminando la fila 1 y la columna j de la matriz A
En la página titulada Matrices hemos visto como se accede a los elementos de una matriz
Tomemos la matriz cuadrada A de dimensión 4×4, la submatriz M12 que se obtiene eliminando la primera fila y la segunda columna es
>> A=[1 2 3 4; 5 6 7 8; 9 10 11 12; 13 14 15 16]
A =
1 2 3 4
5 6 7 8
9 10 11 12
13 14 15 16
>> M12=[A(2:4,1),A(2:4,3:4)]
M12 =
5 7 8
9 11 12
13 15 16
Definimos la función
function d = determinante(A)
n=length(A);
if n==1;
d=A(1,1);
else
d=0;
sgn=1;
for j=1:n
M1j=[A(2:n,1:j-1) A(2:n,j+1:n)];
d=d+sgn*A(1,j)*determinante(M1j);
sgn=-sgn;
end
end
end
Calculamos el determinante de esta matriz utilizando la función
>> A=[-1 0 3; 2 -1 0; 3 1 -2]
A =
-1 0 3
2 -1 0
3 1 -2
>> determinante(A)
ans = 13
En MATLAB la función
>> det(A) ans = 13
Matriz inversa
Se denomina matriz identidad I a aquella matriz cuadrada de dimensiones m×m en la cual los elementos de la diagonal valen 1 y el resto de los elementos vale cero. MATLAB dispone de la función
El producto de la matriz identidad I por otra matriz A nos da la matriz A
Si la matriz A es cuadrada, se obtiene el mismo resultado efectuando el producto A*I o I*A
Si A es una matriz cuadrada, B es su matriz inversa si el producto A*B=B*A=I
En MATLAB se puede obtener la matriz inversa de A elevando A a la potencia -1, A-1 o bien, mediante la función
>> A=[-1 0 3; 2 -1 0; 3 1 -2]
A =
-1 0 3
2 -1 0
3 1 -2
>> B=inv(A)
B =
0.1538 0.2308 0.2308
0.3077 -0.5385 0.4615
0.3846 0.0769 0.0769
>> A*B
ans =
1.0000 0 0
-0.0000 1.0000 -0.0000
0 -0.0000 1.0000
Rango de una matriz
El rango de una matriz es el máximo número de filas linealmente independientes. La función
>> A=[0 -1 2 1; 1 -1 0 -1; 3 1 2 0; 2 -3 2 -1]; >> rank(A) ans = 3
Como podemos apreciar la fila cuatro es combinación lineal de la fila 1 y la fila 2:. a4j=a1j+2·a2j, j=1...4
División por la izquierda y por la derecha
La división por la izquierda se utiliza para resolver la ecuación AX=B. En esta ecuación X es el vector columna de las incógnitas, B es el vector columna de los términos independientes y A es una matriz cuadrada.
A-1AX=IX=X
De modo que
X=A-1B
En MATLAB esta última expresión se escribe utilizando el operador división por la izquierda
X=A\B
La división por la derecha se utiliza para resolver la ecuación XC=D. En esta ecuación X y D son vectores fila y C es una matriz cuadrada.
XCC-1=DC-1
X=DC-1 o bien, X=D/C (división por la derecha)
Sistema de ecuaciones lineales
Sistema de n ecuaciones con n incógnitas. Regla de Cramer
Consideremos un sistema de n ecuaciones con n incógnitas cuya solución es única.
Llamemos A a la matriz de los coeficientes, cuyo determinate d es distinto de cero
La regla de Cramer nos dice que cada una de las incógnitas xj se puede obtener a partir del determinante de la matriz en la que se ha sustituido la columna j de la matriz A por el vector columna de los términos independientes b.
Sea el sistema
A=[3 -1 0; -2 1 1; 2 -1 4];
b=[5;0;15];
n=length(b);
d=det(A);
x=zeros(n,1);
for i=1:n
Ab=[A(:,1:i-1),b,A(:,i+1:n)];
x(i)=det(Ab)/d;
end
disp('Solución')
disp(x);
Solución
2.0000
1.0000
3.0000
Sistema de m ecuaciones con n incógnitas
Sea el sistema
que podemos escribir Ax=b, donde A es una matriz de dimensión m×n, y x y b son dos vectores columna de longitudes n y m respectivamente. Tenemos un sistema de m ecuaciones con n incógnitas.
- El sistema tiene solución si y solo si el rango de la matriz A es igual al rango de la matriz ampliada A|b. Sistema compatible.
- Si el rango es igual al número n de incógnitas el sistema tiene una solución única. Sistema compatible determinado
- Si el rango es menor que el número n de incógnitas entonces hay un número infinito de soluciones. Sistema compatible indeterminado.
Vamos a ver algunos ejemplos:
1.-Sea el sistema de tres ecuaciones con dos incógnitas
En forma matricial se escribe
La matriz A y la matriz ampliada A|b son respectivamente
>> A=[2 1; 2 -1; 1 -2];
>> b=[3;0;4];
>> Ab=[A b]
Ab =
2 1 3
2 -1 0
1 -2 4
>> rank(A)
ans = 2
>> rank(Ab)
ans = 3
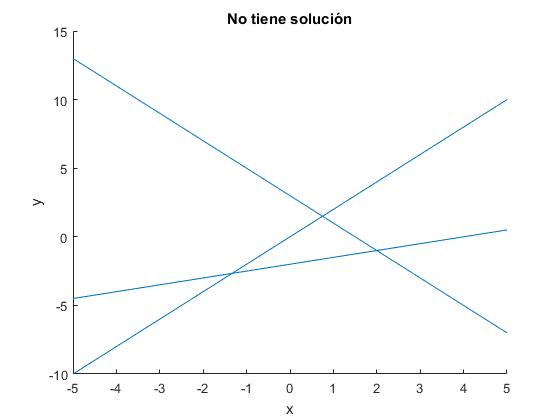
El sistema no tiene solución (primer caso). Cada una de las ecuaciones del sistema representa una recta, identificamos x1 con x y x2 con y. En la figura, vemos la representación gráfica de las rectas: y=3-2x, y=2x, y=x/2-2; que como vemos no se cortan en un punto.
line([-5,5],[13,-7])
line([-5,5],[-10,10])
line([-5,5],[-9/2,1/2])
xlabel('x')
ylabel('y')
title('No tiene solución')
2.-Sea el sistema de tres ecuaciones con dos incógnitas
>> A=[2 1; 4 2; 6 3]; >> b=[3;6;9]; >> Ab=[A b]; >> rank(A) ans = 1 >> rank(Ab) ans = 1
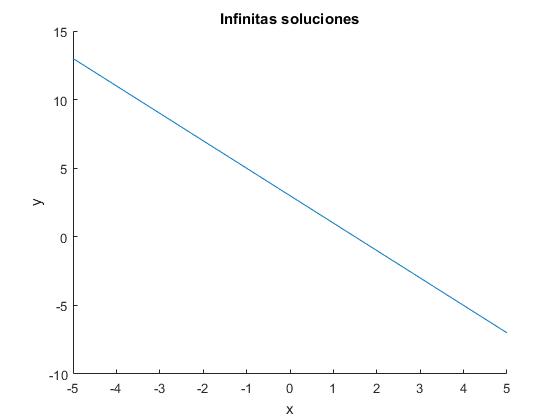
El sistema tiene solución, pero como el rango es menor que el número de incógnitas hay un número infinito de soluciones (tercer caso).
Tenemos tres ecuaciones iguales, la segunda es igual a la primera multiplicada por dos y la tercera es igual a la primera multiplicada por tres. En la figura, se representa la recta y=3-2x, que es la solución del sistema de ecuaciones.
line([-5,5],[13,-7])
xlabel('x')
ylabel('y')
title('Infinitas soluciones')
3.-Sea el sistema de tres ecuaciones con dos incógnitas y su representación matricial
>> A=[2 1; 2 -1; 1 -2]; >> b=[3;5;4]; >> Ab=[A b]; >> rank(A) ans = 2 >> rank(Ab) ans = 2
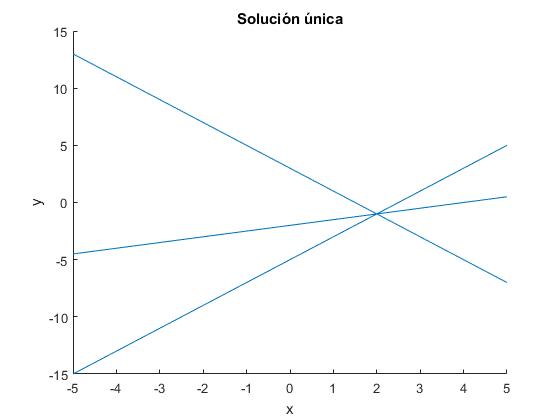
El sistema tiene solución única ya que el rango es igual al número de incógnitas (segundo caso).
>> X=A\b X = 2.0000 -1.0000
En la figura vemos la representación gráfica de las rectas: y=3-2x, y=2x-5, y=x/2-2; que como vemos se cortan en un el punto x=2, y=-1.
line([-5,5],[13,-7])
line([-5,5],[-15,5])
line([-5,5],[-9/2,1/2])
xlabel('x')
ylabel('y')
title('Solución única')
División por la izquierda \
Vamos a practicar la división por la izquierda \ resolviendo el sistema de tres ecuaciones con tres incógnitas:
>> A=[3 -1 0; -2 1 1; 2 -1 4];
>> b=[5;0;15];
>> Ab=[A b];
>> rank(A)
ans = 3
>> rank(Ab)
ans = 3
>> A\b
ans =
2.0000
1.0000
3.0000
>> inv(A)*b
ans =
2.0000
1.0000
3.0000
La función rref
Esta función nos puede ser útil para resolver sistemas de ecuaciones.
- La matriz ampliada Ab del sistema de tres ecuaciones con tres incógnitas del apartado anterior es
>> A=[3 -1 0; -2 1 1; 2 -1 4];
>> b=[5;0;15];
>> Ab=[A b];
>> R=rref(Ab)
R =
1 0 0 2
0 1 0 1
0 0 1 3
Pasamos la matriz Ab a la función
- Sea ahora, el sistema de tres ecuaciones con tres incógnitas siguiente:
Creamos la matriz A de los coeficientes y la matriz ampliada Ab
>> A=[1 1 1;1 0 -2;2 1 -1];
>> b=[-6;4;18];
>> Ab=[A b];
>> R=rref(Ab)
R =
1 0 -2 0
0 1 3 0
0 0 0 1
El sistema equivalente es
Se trata de un sistema incompatible, tal como podemos comprobar calculando el rango de la matriz A y de su ampliada Ab
>> rank(A) ans = 2 >> rank(Ab) ans = 3
- Finalmente, sea el sistema
Creamos la matriz A de los coeficientes y la matriz ampliada Ab
>> A=[1 1 1; 1 0 -2;2 1 -1];
>> b=[6;4;10];
>> Ab=[A b];
>> rref(Ab)
ans =
1 0 -2 4
0 1 3 2
0 0 0 0
La última fila 0x1+0x2+0x3=0 se verifica para cualquier valor de x1, x2 y x3
El sistema equivalente es
Una solución sería por ejemplo, x1=4, x2=2 y x3=0.
>> rank(A) ans = 2 >> rank(Ab) ans = 2
El sistema es compatible e indeterminado.