

Solución numérica de ecuaciones diferenciales mediante ode45
Su sintaxis es la siguiente
x es una matriz donde cada columna corresponde a las variables dependientes y t es el vector tiempo.odefun es el nombre de la funcióntspan especifica el intervalo de tiempo, un vector de dos númerostspan=[ti,tf] , tiempo inicial y final.x0 es un vector que contiene los valores iniciales.options es una estructura que se crea con la funciónodeset , que explicaremos al final de esta página ya que es un asunto bastante complicado.params son parámetros que queremos pasar a la funciónodefun
En la mayor parte de los ejemplos, utilizaremos los tres primeros parámetros: llamaremos al procedimiento
Vamos a volver a resolver los problemas planteados en este capítulo mediante la función MATLAB
Ecuación diferencial de primer orden
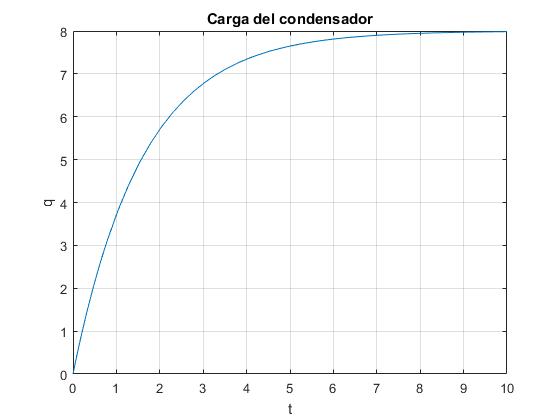
Elaboramos un script para integrar la ecuación diferencial de primer orden que describe la carga de un condensador.
V0=10;
R=2; %resistencia
C=0.8; %capacidad ;
tf=10; %tiempo final
f=@(t,x) V0/R-x/(R*C);
x0=0; %situación inicial
[t,x]=ode45(f,[0,tf],x0);
plot(t,x)
grid on
xlabel('t')
ylabel('q');
title('Carga del condensador')
Sistema de dos ecuaciones diferenciales de primer orden
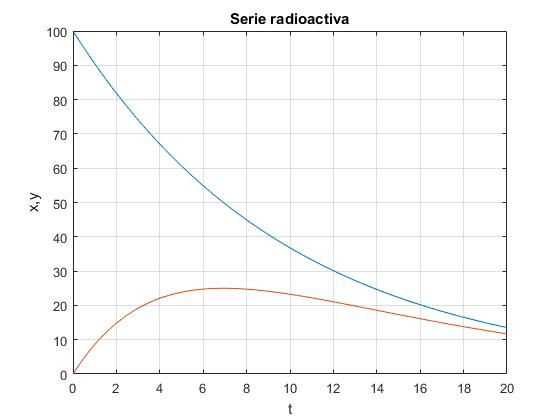
Elaboramos un script para integrar el sistema de dos ecuaciones diferenciales de primer orden que describe la serie de desintagración radioactiva. A-->B-->C donde C es un elemento estable.
En el vector
La definición de las funciones
fg=@(t,x) [-a*x(1);a*x(1)-b*x(2)]; % x(1) es x, x(2) es y
El script será el siguiente:
a=0.1; %parámetro a
b=0.2; %parámetro b
%condiciones iniciales en el vector x0
x0=[100,0]; %100 es el valor inicial de x, 0 es valor inicial de y
tf=20; %tiempo final, tf
fg=@(t,x) [-a*x(1);a*x(1)-b*x(2)];
[t,x]=ode45(fg,[0,tf],x0);
plot(t,x)
grid on
xlabel('t')
ylabel('x,y');
title('Serie radoioactiva')
En la ventana de comandos corremos el script
Alternativamente, vamos a definir las funciones
function z=func_radioactivo(t,x,a,b)
z=[-a*x(1);a*x(1)-b*x(2)]; % x(1) es x, x(2) es y
end
Elaboramos un script para establecer los valores de los parámetros
Ahora bien,
fg=@(t,x) func_radioactivo_1(t,x,a,b);
a=0.1; %parámetro a
b=0.2; %parámetro b
%condiciones iniciales en el vector x0
x0=[100,0]; %100 es el valor inicial de x, 0 es valor inicial de y
tf=20; %tiempo final, tf
fg=@(t,x) func_radioactivo(t,x,a,b);
%fg=@(t,x) [-a*x(1);a*x(1)-b*x(2)];
[t,x]=ode45(fg,[0,tf],x0);
plot(t,x)
grid on
xlabel('t')
ylabel('x,y');
title('Serie radioactiva')
Ecuación diferencial de segundo orden
Una vez que se ha entendido como resolver un sistema de dos ecuaciones diferenciales de primer orden es posible entender la resolución de cualquier ecuación diferencial o sistema. Podemos definir las funciones de forma anónima o explícitamente en un fichero .m
|
|
En este sistema de dos ecuaciones diferenciales de primer orden
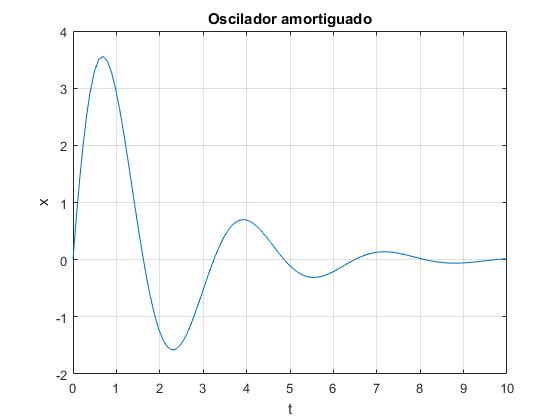
Como ejemplo, estudiamos las oscilaciones amortiguadas, que hemos descrito en la página anterior.
Las funciones a integrar v, y f (t,x,v) aparecen en un vector columna, separadas por ; (punto y coma)
f=@(t,x) [x(2);-2*g*x(2)-w0*w0*x(1)]; % x(1) es x, x(2) es v
Elaboramos un script para resolver la ecuación de segundo grado que describe las oscilaciones amortiguadas
w0=2; %frecuencia angular
g=0.5; %constante rozamiento
%condiciones iniciales
x0=[0,10]; % 0 es posición inicial, 10 es velocidad inicial
tf=10; %tiempo final
f=@(t,x) [x(2);-2*g*x(2)-w0*w0*x(1)];
[t,x]=ode45(f,[0,tf],x0);
plot(t,x(:,1))
grid on
xlabel('t')
ylabel('x');
title('Oscilador amortiguado')
Si solamente queremos representar la posición
Podría ocurrir casos en los que se precisase definir la función
function dr=amortiguadas(t, x, g, w0)
dr=zeros(2,1);
dr(1)=x(2);
dr(2)=-2*g*x(2)-w0*w0*x(1);
end
A esta función se le necesita pasar además del vector
w0=2; %frecuencia angular
g=0.5; %constante rozamiento
%condiciones iniciales
x0=[0,10]; % 0 es posición inicial, 10 es velocidad inicial
tf=10; %tiempo final
f=@(t,x) amortiguadas(t,x,g,w0);
[t,x]=ode45(f,[0,tf],x0);
plot(t,x(:,1))
grid on
xlabel('t')
ylabel('x');
title('Oscilador amortiguado')
Sistema de dos ecuaciones diferenciales de segundo orden
En este caso tenemos un sistema de cuatro ecuaciones difrenciales de primer orden
|
|
|
|
En este sistema
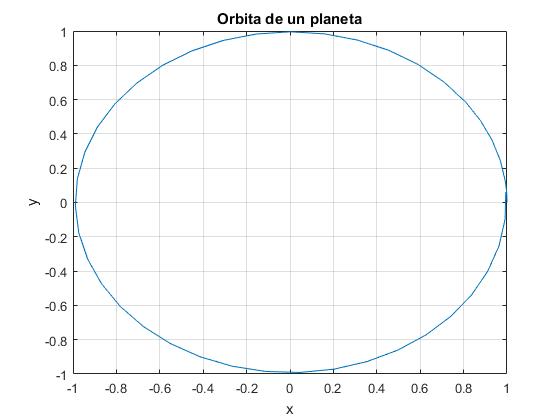
Como ejemplo, estudiamos el movimiento de un planeta alrededor del Sol o de un satélite artificial alrededor de la Tierra.
Elaboramos un script para resolver el sistema de dos ecuaciones de segundo grado que describe el movimiento de un cuerpo celeste.
%posición inicial x, velocidad x, posición y, velocidad y
x0=[1,0,0,6.27];
tf=1; %tiempo final
fg=@(t,x)[x(2);-4*pi*pi*x(1)/(sqrt(x(1)*x(1)+x(3)*x(3)))^3; x(4);
-4*pi*pi*x(3)/(sqrt(x(1)*x(1)+x(3)*x(3)))^3];
[t,x]=ode45(fg,[0,tf],x0);
plot(x(:,1),x(:,3))
grid on
xlabel('x')
ylabel('y');
title('Orbita de un planeta')
Representamos la trayectoria, es decir, los puntos de abscisas
Podría ocurrir casos en los que se precisase definr la función
function dr=planeta(t, x)
dr=zeros(4,1);
dr(1)=x(2);
dr(2)=-4*pi*pi*x(1)/(sqrt(x(1)*x(1)+x(3)*x(3)))^3;
dr(3)=x(4);
dr(4)=-4*pi*pi*x(3)/(sqrt(x(1)*x(1)+x(3)*x(3)))^3;
end
La llamada a esta función desde el procedimiento
%posición inicial x, velocidad x, posición y, velocidad y
x0=[1,0,0,6.27];
tf=1; %tiempo final
[t,x]=ode45(@planeta,[0,tf],x0);
plot(x(:,1),x(:,3))
grid on
xlabel('x')
ylabel('y');
title('Orbita de un planeta'
Opciones de ode45
Imaginemos que estudiamos el movimiento de caída de un cuerpo, no sabemos cuanto tiempo tardará en llegar al suelo, desconocemos el valor del elemento
Detener la integración de la ecuación diferencial
La opción más importante cuando resolvemos ecuaciones diferenciales es la de detener la integración numérica cuando se cumple una o varias condiciones
En el ejemplo, del movimiento de un cuerpo celeste, queremos que la integración del sistema de dos ecuaciones diferenciales se detenga cuando regrese a la posición inicial.
Los pasos a seguir son los siguientes:
El cuerpo celeste parte de la posición (1,0). Definimos la función cuyo nombre es
stop_planeta y que detiene la integración cuando la ordenada y vuelve a ser es cero.Creamos la estructura
opts con la llamada a la funciónodeset Le pasamos
opts al procedimientoode45 en su cuarto parámetro
function [value,isterminal,direction]=stop_planeta(t,x)
%x(1) es x, x(3) es y
value=x(3);
isterminal=1; %1 detiene la integración cuando la velocidad se hace cero
direction=1; % 1 crece, -1 decrece, 0 no importa
end
Cuando se utiliza
Creamos un script para resolver la ecuación diferencial de segundo orden y detener el proceso de integración de acuerdo con lo estipulado en el parámetro
%posición inicial x, velocidad x, posición y, velocidad y
x0=[1,0,0,6.27];
tf=10; %tiempo final
opts=odeset('events',@stop_planeta);
fg=@(t,x)[x(2);-4*pi*pi*x(1)/(sqrt(x(1)*x(1)+x(3)*x(3)))^3; x(4);
-4*pi*pi*x(3)/(sqrt(x(1)*x(1)+x(3)*x(3)))^3];
[t,x, te]=ode45(fg,[0,tf],x0,opts);
plot(x(:,1),x(:,3))
grid on
xlabel('x')
ylabel('y');
title('Orbita de un planeta')
En la ventana de comandos vemos el tiempo te que tarda el cuerpo celeste en completar una vuelta
te =
0.0000
0.9779
En la página web titulada Una esfera que choca con un escalón cuya altura es menor que su radio. Si la velocidad inicial de la esfera es mayor que un valor crítico, la esfera apoyada en la esquina del escalón gira 90 grados y continúa su movimiento con una velocidad menor. Si es menor que el valor crítico, la esfera gira hasta un ángulo máximo cuando su velocidad angular se hace cero y regresa al punto de partida con la misma velocidad pero de sentido contrario
Resolvemos la ecuación diferencial con las condiciones iniciales: en el instante t=0, la posición angular θ=θ0, la velocidad angular dθ/dt=(dθ/dt)0 (
h=0.3; %altura escalón
R=1; %radio esfera
v0=2; %velocidad incial
w0=(1-5*h/(7*R))*v0/R; %velocidad angular inicial
th_0=asin((R-h)/R); %ángulo inicial
x0=[th_0,w0];
f=@(t,x) [x(2); -5*9.8*cos(x(1))/(7*R)];
opts=odeset('events',@stop_esfera_escalon);
[t,x, te, xe,ie]=ode45(f,[0,50],x0,opts);
plot(t, x(:,1))
grid on
xlabel('t')
ylabel('\theta')
title('Esfera que choca con un escalón')
Definimos la función
- Cuando su posición angular alcance, θ=π/2 ( 90°)
- Cuando alcance el ángulo máximo, θm con velocidad angular cero
function [value,isterminal,direction]=stop_esfera_escalon(t,x)
value=[x(2), x(1)-pi/2];
isterminal=[1, 1];
direction=[-1,1];
end
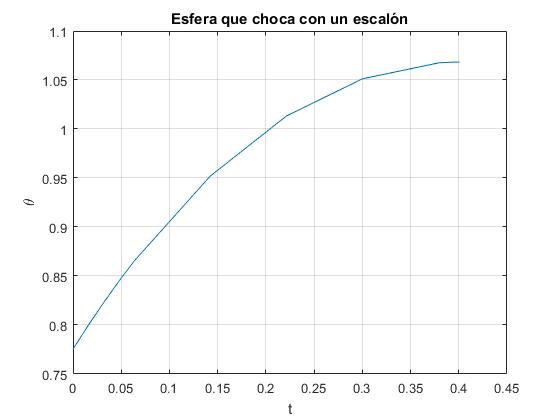
La variable xe nos proporciona la posición angular y la velocidad angular final, y la variable te el tiempo. Cuando la velocidad inicial v0=2, el centro de la esfera gira un ángulo máximo θm=1.07 (61.2°), hasta que se detiene, empleando un tiempo de 0.4.
>> te te = 0.4007 >> xe xe = 1.0682 -0.0000
Cuando cambiamos la velocidad inicial a v0=3, la posición angular final es π/2 (90°), y la velocidad angular final 1.16. El centro de la esfera gira 90° y proseguirá su movimiento en el escalón a una velocidad menor
>> te te = 0.5139 >> xe xe = 1.5708 1.1643
Para el caso de la velocidad inicial v0=2, nos podría interesar el movimiento completo de la esfera, girando alrededor de la esquina del escalón. La esfera parte de la posición incial θ0 en el instante t=0, alcanza la máxima posición angular θm=1.07 (61.2°), con velocidad angular nula y retorna a la posición inicial θ0 con la misma velocidad que la de partida pero en sentido contrario. Redefinimos la función
function [value,isterminal,direction]=stop_esfera_escalon(t,x, th_0)
value=[x(1)-th_0, x(1)-pi/2];
isterminal=[1, 1];
direction=[-1,1];
end
Este ejemplo, ilustra además, la forma de pasar parámetros a la función
h=0.3; %altura escalón
R=1; %radio esfera
v0=2; %velocidad incial
w0=(1-5*h/(7*R))*v0/R; %velocidad angular inicial
th_0=asin((R-h)/R); %ángulo inicial
x0=[th_0,w0];
f=@(t,x) [x(2); -5*9.8*cos(x(1))/(7*R)];
opts=odeset('events',@(t,x) stop_esfera_escalon(t,x,th_0));
[t,x, te, xe,ie]=ode45(f,[0,50],x0,opts);
plot(t, x(:,1))
grid on
xlabel('t')
ylabel('\theta')
title('Esfera que choca con un escalón')
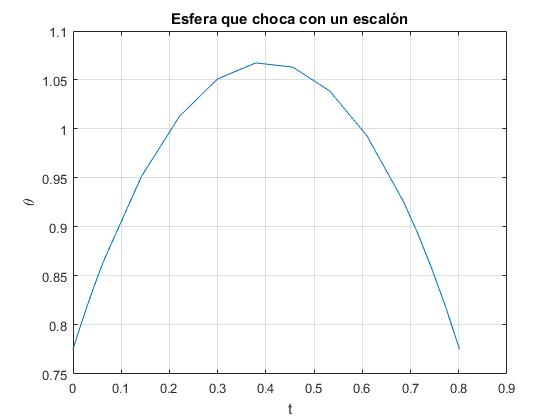
Vuelve a la posición inicial, con la misma velocidad angular de partida (cambiada de signo) después de un tiempo t=0.8
>> te te = 0.8015 >> xe xe = 0.7754 -1.5712 >> w0 w0 = 1.5714 >> th_0 th_0 = 0.7754
Resaltar información relevante
A veces nos interesa además, resaltar información relevente en las gráficas, máximos, mínimos, puntos de corte con el eje X, etc.
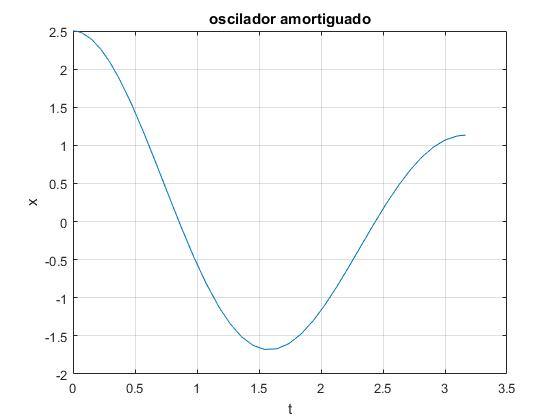
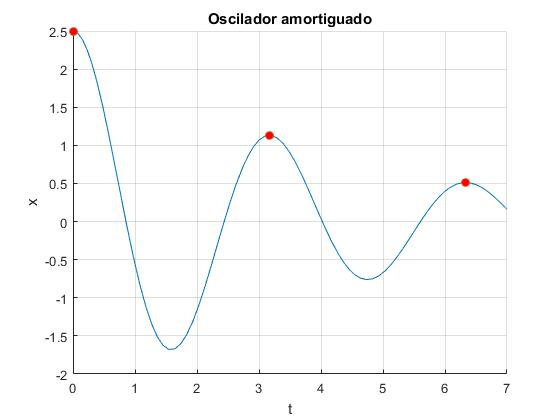
Volvamos a considerar el oscilador amortiguado estudiado anteriormente, de frecuencia natural ω0=2, constante de amortiguamiento γ=0.25, parte de la posición x0=2.5 con velocidad nula. Queremos detener el proceso de integración cuando el móvil alcance la posición máxima, cuando su velocidad es nula, tal como se muestra en la figura (más abajo), con lo que se completa un periodo.
Volvemos a describir los pasos a seguir:
Definimos la función cuyo nombre es
opcion_ode45 Creamos la estructura
opts con la llamada a la funciónodeset Le pasamos
opts al procedimientoode45 en su cuarto parámetro
function [value,isterminal,direction]=opcion_ode45(t,x)
value=[x(1) x(2)]; %[posición, velocidad]
%1 indice que detiene la integración cuando la velocidad se hace cero
isterminal=[0 1];
direction=[0 -1]; % 1 crece, -1 decrece, 0 no importa
end
Cuando se utiliza
Escribimos un script para resolver la ecuación diferencial de segundo orden y detener el proceso de integración de acuerdo con lo estipulado en el parámetro opts.
w0=2;
g=0.25;
x0=[2.5 0]; %posición inicial, velocidad inicial
tf=10;
f=@(t,x) [x(2);-2*g*x(2)-w0*w0*x(1)];
tf=10;
opts=odeset('events',@opcion_ode45);
[t,x,te,xe,ie]=ode45(f,[0,tf],x0,opts);
plot(t,x(:,1))
grid on
xlabel('t')
ylabel('x');
title('Oscilador amortiguado')
En la ventana de comandos se imprime los siguientes datos relativos a los eventos, que se explican en la tabla.
>> te,xe,ie
te =
0.0000
0.8547
2.4378
3.1662
xe =
2.5000 -0.0000
-0.0000 -4.0378
0.0000 2.7173
1.1322 -0.0000
ie =
2
1
1
2
| Tiempo, te | Posición x(1) | Velocidad x(2) | Indice ie |
|---|---|---|---|
| 0.0000 | 2.5000 | -0.0000 | 2 |
| 0.8547 | -0.0000 | -4.0378 | 1 |
| 2.4378 | 0.0000 | 2.7173 | 1 |
| 3.1662 | 1.1322 | -0.0000 | 2 |
- Cuando parte de la posición inicial
x(1) =2.5 la velocidad es cerox(2) =0, detecta velocidad (índiceie =2). - Cuando pasa por el origen
x(1) =0 detecta posición (índiceie =1), pero no se detiene ya que enisterminal se ha puesto un cero. - Cuando la posición es
x(1) =1.1322 detecta velocidad nulax(2) =0, (índiceie =2) y la integración numérica se detiene ya que enisterminal se ha puesto un uno y la velocidad decrece endirection se ha puesto un -1.
La columna de tiempos nos porporciona el periodo de la oscilación,
Se sugiere al lector, cambiar en la función
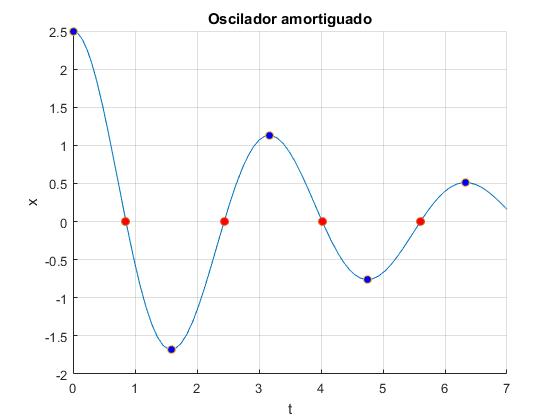
Vamos ahora a marcar en la representación gráfica de la oscilación amortiguada, las posiciones de máxima amplitud
Definimos una nueva versión de la función
function [value,isterminal,direction]=opcion1_ode45(t,x)
value=[x(1), x(2)]; %[posición, velocidad]
isterminal=[0, 0];
direction=[0, 0];
end
Creamos la estructura
w0=2;
g=0.25;
x0=[2.5 0]; %posición inicial, velocidad inicial
tf=10;
f=@(t,x) [x(2);-2*g*x(2)-w0*w0*x(1)];
tf=7;
opts=odeset('events',@opcion1_ode45);
[t,x,te,xe,ie]=ode45(f,[0,tf],x0,opts);
hold on
plot(t,x(:,1))
plot(te(ie==1),xe(ie==1),'o','markersize',6,'markerfacecolor','r')
plot(te(ie==2),xe(ie==2),'o','markersize',6,'markerfacecolor','b')
hold off
grid on
xlabel('t')
ylabel('x');
title('Oscilador amortiguado')
Si solamente estamos interesados en los máximos definimos una nueva versión de la función
function [value,isterminal,direction]=opcion1_ode45(t,x)
value=x(2); %[posición, velocidad]
isterminal=0;
direction=-1;
end
Modificamos el script
w0=2;
g=0.25;
x0=[2.5 0]; %posición inicial, velocidad inicial
tf=10;
f=@(t,x) [x(2);-2*g*x(2)-w0*w0*x(1)];
tf=7;
opts=odeset('events',@opcion1_ode45);
[t,x,te,xe,ie]=ode45(f,[0,tf],x0,opts);
hold on
plot(t,x(:,1))
plot(te(ie==1),xe(ie==1),'o','markersize',6,'markerfacecolor','r')
hold off
grid on
xlabel('t')
ylabel('x');
title('Oscilador amortiguado')
El paso de integración
En el procedimiento Runge-Kutta de integración de ecuaciones diferenciales requiere un paso que se especifica en la variable
Resolvemos el sistema de ecuaciones diferenciales que describe el movimiento de una partícula sobre una plataforma en rotación
La partícula parte del origen ξ=0, θ=0, con velocidad radial dξ/dτ=2, dθ/dt=0. Representamos la trayectoria hasta el instante τ=80
% x(1) es r, x(2) dr/dt, x(3) es th, x(4) dth/dt
fg=@(t,x)[x(2); x(1)*x(4)^2+x(1)+2*x(1)*x(4)-x(2)/sqrt(x(2)^2+x(1)^2*x(4)^2);
x(4); -2*x(2)*x(4)/x(1)-2*x(2)/x(1)-x(4)/sqrt(x(2)^2+x(1)^2*x(4)^2)];
[~,x]=ode45(fg,[0,80],[eps, 2, 0, 0]); %eps evita la división entre cero
xx=x(:,1).*cos(x(:,3));
yy=x(:,1).*sin(x(:,3));
plot(xx,yy)
axis equal
grid on
xlabel('x')
ylabel('y');
title('Partícula sobre un disco en rotación')
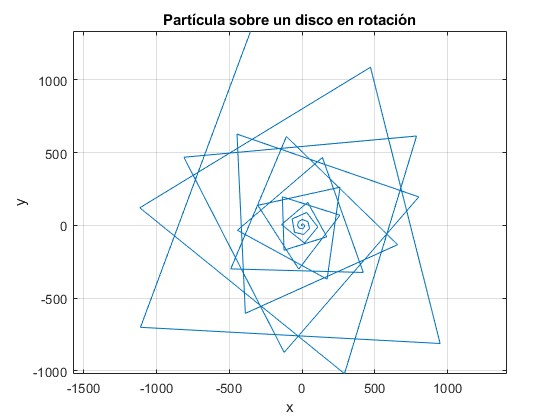
La representación gráfica de la trayectoria de la partícula es completamente insatisfactoria
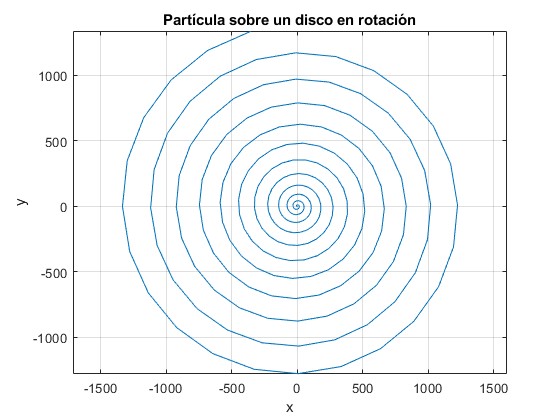
Si cambiamos el vector de los instantes inicial y final
% x(1) es r, x(2) dr/dt, x(3) es th, x(4) dth/dt
fg=@(t,x)[x(2); x(1)*x(4)^2+x(1)+2*x(1)*x(4)-x(2)/sqrt(x(2)^2+x(1)^2*x(4)^2);
x(4); -2*x(2)*x(4)/x(1)-2*x(2)/x(1)-x(4)/sqrt(x(2)^2+x(1)^2*x(4)^2)];
[~,x]=ode45(fg,linspace(0,80,300),[eps, 2, 0, 0]);
xx=x(:,1).*cos(x(:,3));
yy=x(:,1).*sin(x(:,3));
plot(xx,yy)
axis equal
grid on
xlabel('x')
ylabel('y');
title('Partícula sobre un disco en rotación')
Paso de parámetros a la función
Como hemos visto, a
El sistema de ecuaciones de Lorentz es un sistema de tres ecuaciones diferenciales de primer orden
donde σ=10, β=8/3 y ρ=28
Vamos a resolver el sistema de tres ecuaciones diferenciales con las condiciones iniciales siguientes: en el instante t=0, x0=-8, y0=8 z0=27.
- Escribir una función denominada
lorentz(t,x,p) como fichero .m que contenga las tres ecuaciones y dependa de los tres parámetros σ=p(1) , β=p(2) y ρ=p(3) . Observar que la variable x se guarda en el primer elementox(1) , la variable y en el segundox(2) y la variable z en el tercerx(3) elemento del vectorx . - Escribir un script denominado que llame a la función MATLAB
ode45 , para resolver el sistema de ecuaciones diferenciales para las condiciones iniciales especificadas. - Pasar los parámetros σ, β y ρ como elementos de un vector
p al procedimientoode45 para que a su vez se los pase a la funciónlorentz . - Representar z en función de x hasta el instante tf=20 en una primera ventana gráfica.
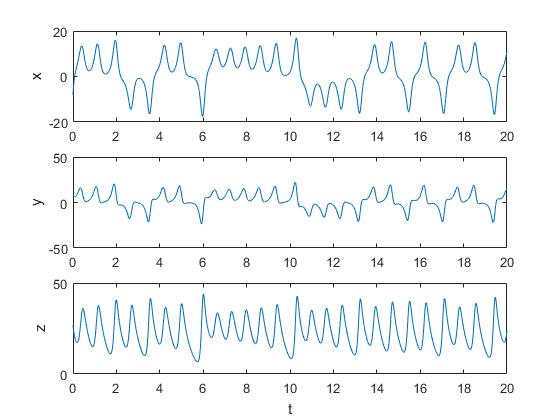
- Dibujar x, y y z en función del tiempo en tres zonas de una segunda ventana gráfica.
- Examinar el comportamiento del sistema para otras condiciones iniciales, t=0, x0=1, y0=2 z0=3.
Definimos la función
function fg=lorentz(t,x,p)
%x(1) es x, x(2) es y y x(3) es z
% p(1) es sigma, p(2) es beta y p(3) es rho
fg=[-p(1)*x(1)+p(1)*x(2); p(3)*x(1)-x(2)-x(1)*x(3); -p(2)*x(3)+x(1)*x(2)];
end
Elaboramos el script
x0=[-8 8 27]; %valores iniciales
tf=20; %instante final
p=[10 8/3 28]; %parámetros
%no pasamos nada [] en el parámetro options de ode45
[t,x]=ode45(@lorentz,[0,tf],x0,[],p);
figure
plot(x(:,1),x(:,3),'r')
xlabel('x')
ylabel('z');
title('Atractor de Lorentz')
figure
subplot(3,1,1)
plot(t,x(:,1))
ylabel('x');
subplot(3,1,2)
plot(t,x(:,2))
ylabel('y');
subplot(3,1,3)
plot(t,x(:,3))
ylabel('z');
xlabel('t')
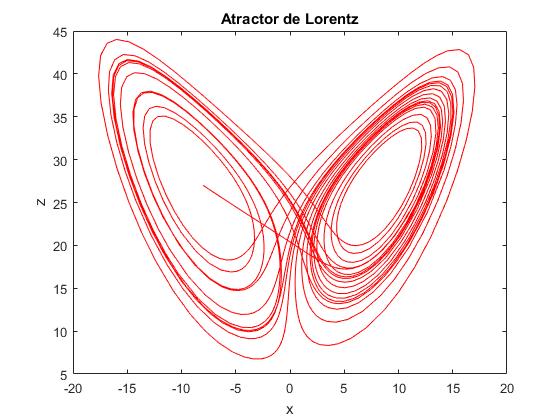
Aparecen dos ventanas gráficas, la primera con el atractor de Lorentz, la representación z(x) y la segunda ventana dividida en tres regiones que muestran x(t), y(t) y z(t)
Otra forma de pasar parámetros
Se pasan los parámetros a la función a integrar de la siguiente forma
x0=[-8,8,27]; %valores iniciales
tf=20; %instante final
sigma=10;
beta=8/3;
rho=28;
fg=@(t,x) lorentz_1(t,x,sigma, beta, rho);
[t,x]=ode45(fg,[0,tf],x0);
figure
plot(x(:,1),x(:,3),'r')
xlabel('x')
ylabel('z');
title('Atractor de Lorentz')
figure
subplot(3,1,1)
plot(t,x(:,1))
ylabel('x');
subplot(3,1,2)
plot(t,x(:,2))
ylabel('y');
subplot(3,1,3)
plot(t,x(:,3))
ylabel('z');
xlabel('t')
La definición de la función denominada
function z=lorentz_1(t,x,sigma, beta, rho)
%x(1) es x, x(2) es y y x(3) es z
z=[-sigma*x(1)+sigma*x(2); rho*x(1)-x(2)-x(1)*x(3); -beta*x(3)+x(1)*x(2)];
end
Este modo de pasar parámetros a la función a integrar es preferible y más transparente que la forma anterior
Ejemplos en el curso de Física
ode45
Movimiento sobre una superficie semicircular cóncava
Movimiento sobre una superficie cóncava en forma de cicloide
Movimiento sobre una superficie parabólica
Un péndulo simple situado sobre una plataforma móvil
Movimiento del extremo de una cadena bajo la acción de un fuerza constante
Estudio del movimiento de una cadena con una máquina de Atwood
Movimiento de dos bloques atados por una cuerda
Movimiento de una partícula atada a una cuerda que se enrolla en un cilindro horizontal.
Solución numérica de las ecuaciones del movimiento
Dos partículas unidas por una cuerda.
El problema de Euler de los tres cuerpos
Caída de una varilla inclinada
Caída de un lápiz en posición vertical
Movimiento bajo la acción de fuerzas centrales
Simulación de los giros del patinador de hielo
Fuerza de rozamiento proporcional al cuadrado de la velocidad
Descenso de un paracaidista en una atmósfera no uniforme
Oscilador amortiguado por una fuerza de módulo constante.
Vibración de una molécula diatómica.El potencial de Lennard-Jones
Oscilaciones forzadas en un sistema formado por partículas unidas por muelles. Fuerza periódica
El motor electrostático de Franklin
Movimiento de dos cargas de distinto signo en campo magnético uniforme
Oscilaciones de un cilindro que rueda sobre un plano inclinado con un imán en su interior
Oscilaciones de un imán colgado de un muelle
Movimiento de un imán en un tubo metálico vertical
Oscilaciones de un imán colgado de un muelle amortiguadas por una bobina
Osciladores magnéticamente acoplados
Oscilaciones de un imán colgado de un muelle amortiguadas por una placa metálica
Péndulo accionado por las fuerzas de marea
ode15s
Vaciado de un depósito cerrado