

Solución numérica de ecuaciones diferenciales (I)
Procedimiento de Picard
Vamos a resolver la ecuación diferencial
con la condición inicial, t=t0, x=x0
Integrando
Aproximaciones sucesivas
Ejemplo. Sea la ecuación diferencial
Con la condición inicial t=0, x=1
Solución analítica
Solución aproximada
La solución de la ecuación diferencial homogénea es
La solución particular es xp=Bt+C. Introduciendo en la ecuación diferencial
La solución completa de la ecuación diferencial es
El coeficiente A se determina a partir de la condición inicial, t=0, x=1
Representamos la solución exacta y aproximada en el intervalo [-3,3]
syms t;
x=1; %para t=0, condición inicial
for n=1:5
x=1+int(@(t) t+x, 0,t);
x=simplify(x);
end
hold on
disp(x)
fplot(x,[-3,3]) %aproximada
x=2*exp(t)-t-1;
fplot(x,[-3,3]) %exacta
hold off
grid on
xlabel('t')
ylabel('x')
legend('aproximada', 'exacta')
title('Solución exacta y aproximada')
t^6/720 + t^5/60 + t^4/12 + t^3/3 + t^2 + t + 1
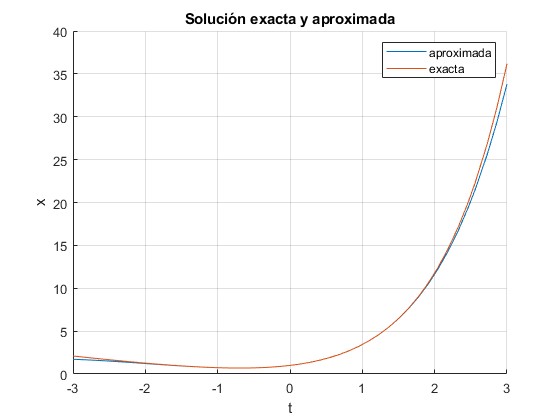
Desarrollamos en serie la exponencial et en la solución exacta y la comparamos con la solución aproximada
>> syms t; >> 2*taylor(exp(t),t,0,'order',7)-t-1 ans =t^6/360 + t^5/60 + t^4/12 + t^3/3 + t^2 + t + 1
Vemos que coinciden hasta el término en t5
El procedimiento de Picard está limitado a ecuaciones diferenciales que se pueden integrar fácilmente en las sucesivas aproximaciones. Por ejemplo, la ecuación diferencial
Con la condición inicial, t=0, x=1
Solamente se puede obtener la primera aproximación
Esta integral es muy difícil de resolver
Método de Euler
Vamos aresolver la ecuación diferencial de primer orden
con con la condición inicial de que en el instante t0 la posición es x0
La primera derivada nos permite conocer la posición xi+1 en el instante ti+1, a partir de la posición xi en el instante ti de acuerdo a la fórmula siguiente. La línea de color rojo es la tangente a la curva en el instante ti
xi+1=xi+f(ti,xi)h
El procedimiento de Euler produce un error que se acumula a cada paso h de integración, que es el segmento en color azul que une los dos puntos en la figura.
Escribimos una función denominada
- la función f(t,x),
- la condición inicial de que en el instante t0 la posición es x0,
- el instante final tf
- el número de pasos de integración n
y nos devolverá un vector
function [t,x] =euler(f,t0,tf,x0,n)
h=(tf-t0)/n;
t=t0:h:tf;
x=zeros(n+1,1); %reserva memoria para n+1 elementos del vector x
x(1)=x0;
for i=1:n
x(i+1)=x(i)+f(t(i),x(i))*h;
end
end
Supongamos que queremos integrar la ecuación diferencial
con las condición inicial t=0, x=0.
Tomamos un intervalo h=π/6, y construimos la siguiente tabla
t |
|
x(Euler) |
x=sin t |
|---|---|---|---|
| 0 | 1 | 0 | 0 |
| π/6 | 0.866 | 0.523 | 0.5 |
| π/3 | 0.5 | 0.977 | 0.866 |
| π/2 | 0 | 1.239 | 1 |
| 2π/3 | -0.5 | 1.239 | 0.866 |
| 5π/6 | -0.866 | 0.977 | 0.5 |
| π | 0.523 | 0 |
Para aplicar el método de Euler precisamos de un paso h pequeño, incluso así los errores se van acumulando y al cabo de cierto tiempo la diferencia entre el valor exacto y el calculado es grande.
Escribimos un script en el que definiremos la función f(t,x), las condiciones iniciales y llamaremos a la función
tf=input('tiempo final, tf: ');
n=input('número de pasos, n: ');
f=@(t,x) cos(t);
%condiciones iniciales
t0=0;
x0=0;
[t,x]=euler(f,t0,tf,x0,n);
hold on
plot(t,x,'b')
y=sin(t);
plot(t,y,'r')
xlabel('t')
ylabel('x')
grid on
legend('aproximada','exacta')
title('dx/dt=cost')
hold off
En la ventana de comandos corremos el script
tiempo final, tf: pi número de pasos, n: 40
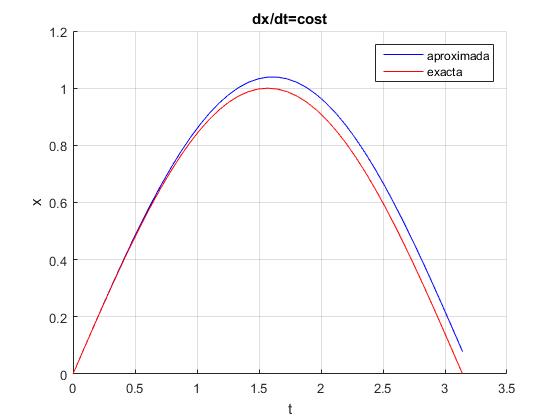
Apreciamos diferencias entre la solución exacta y la obtenida mediante integración numérica por el método de Euler
Método de Runge-Kutta
En esta sección vamos a estudiar la aplicación del método de Runge-Kutta a:
- Una ecuación diferencial de primer orden
- Un sistema de dos ecuaciones diferenciales de primer orden
- Una ecuación difrencial de segundo orden
- Un sistema de dos ecuaciones diferenciales de segundo orden
Ecuación diferencial de primer orden
Sea una ecuación diferencial de primer orden, con la condición inicial de que en el instante t0 el valor inicial de x es x0
Se elige una anchura de paso h y se calculan cuatro números k1, k2, k3, k4 de acuerdo con el procedimiento esquematizado en la tabla adjunta. Según el procedimiento ordinario de Runge-Kutta, a partir del valor de x en el instante t se determina el valor de x en el instante t+h mediante la fórmula que figura en la última fila de dicha tabla.
|
|
|
Definimos la función
- la función f(t,x),
- la condición inicial de que en el instante t0el valor inicial es x0,
- el instante final tf
- el número de pasos de integración n comprendidos entre el instante inical t0 y final tf.
y nos devolverá un vector
function [t,x] =rk_1(f,t0,tf,x0,n)
h=(tf-t0)/n;
t=t0:h:tf;
x=zeros(n+1,1); %reserva memoria para n elementos del vector x
x(1)=x0;
for i=1:n
k1=h*f(t(i),x(i));
k2=h*f(t(i)+h/2,x(i)+k1/2);
k3=h*f(t(i)+h/2,x(i)+k2/2);
k4=h*f(t(i)+h,x(i)+k3);
x(i+1)=x(i)+(k1+2*k2+2*k3+k4)/6;
end
end
Considérese el circuito en serie de la figura. Inicialmente el condensador está descargado. Si se cierra el interruptor I la carga empieza a fluir produciendo corriente en el circuito, el condensador se empieza a cargar. Una vez que el condensador adquiere la carga máxima, la corriente cesa en el circuito.
Escribimos un script para que realice las siguientes tareas:
- Establezca, mediante comandos
input : - La resistencia R del circuito
- La capacidad C del condensador
- El tiempo final, tf
- el número de pasos, n.
- Fije las condiciones iniciales, en el instante inicial t=0, el condensador está descargado x=0.
- Defina la función f(t,x),
- Llame al procedimiento numérico
rk_1 - Mediante el comando
plot realice una representación gráfica de la solución numérica - Realice una representación gráfica de la solución exacta
Ejemplo: R=2.0, C=0.8, y tf=10.
V0=10;
R=input('Resistencia R: ');
C=input('Capacidad C: ');
tf=input('tiempo final, tf: ');
n=input('número de pasos, n: ');
f=@(t,x) V0/R-x/(R*C);
%condiciones iniciales
t0=0; x0=0;
[t,x]=rk_1(f,t0,tf,x0,n);
hold on
plot(t,x,'b')
y=C*V0*(1-exp(-t/(R*C)));
plot(t,y,'r')
xlabel('t')
ylabel('q')
grid on
legend('aproximada','exacta','Location','Southeast')
title('Carga del condensador')
hold off
En la ventana de comandos corremos el script
Resistencia R: 2 Capacidad C: 0.8 tiempo final, tf: 10 número de pasos, n: 50
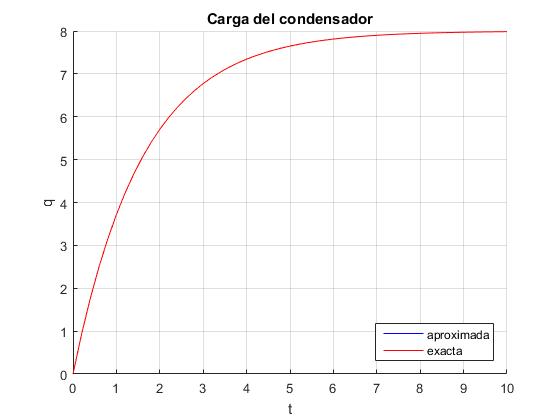
No se aprecia diferencia entre la solución exacta y la numérica, aplicando el procedimiento de Runge_Kutta.
Sistema de dos ecuaciones diferenciales de primer orden
El procedimiento de Runge-Kutta es igualmente efectivo en la resolución de un sistema de dos ecuaciones diferenciales de primer orden.
El procedimiento de aplicación del método de Runge-Kutta a cada una de las ecuaciones diferenciales, con las condición inicial siguiente, en el instante t0
- el valor inicial de x es x0
- el valor inicial de y es y0
se esquematiza en la tabla adjunta. Como vemos además de los cuatro números k1, k2, k3, k4 para la primera ecuación diferencial precisamos otros cuatro números l1, l2, l3, l4 para la segunda ecuación diferencial. A partir del valor de x en el instante t, se determina el valor de x en el instante t+h, y a partir del valor de y en el instante t se determina el valor de y en el instante t+h mediante las fórmulas de la última fila de la tabla.
|
|
|
|
|
|
Definimos la función
- las funciones f (t,x,y) y g(t,x,y)
- las condiciones iniciales (x0,y0) en el instante t0
- el número n de pasos de integración entre t0 y el tiempo final tf
Nos devuelve los vectores
function [t,x,y] =rk_2_1(f,g,t0,tf,x0,y0,n)
h=(tf-t0)/n;
t=t0:h:tf;
%reserva memoria para n+1 element(i)os del vect(i)or x(i)
x=zeros(n+1,1);
y=zeros(n+1,1);
x(1)=x0; y(1)=y0;
for i=1:n
k1=h*f(t(i),x(i),y(i));
l1=h*g(t(i),x(i),y(i));
k2=h*f(t(i)+h/2,x(i)+k1/2,y(i)+l1/2);
l2=h*g(t(i)+h/2,x(i)+k1/2,y(i)+l1/2);
k3=h*f(t(i)+h/2,x(i)+k2/2,y(i)+l2/2);
l3=h*g(t(i)+h/2,x(i)+k2/2,y(i)+l2/2);
k4=h*f(t(i)+h,x(i)+k3,y(i)+l3);
l4=h*g(t(i)+h,x(i)+k3,y(i)+l3);
x(i+1)=x(i)+(k1+2*k2+2*k3+k4)/6;
y(i+1)=y(i)+(l1+2*l2+2*l3+l4)/6;
end
end
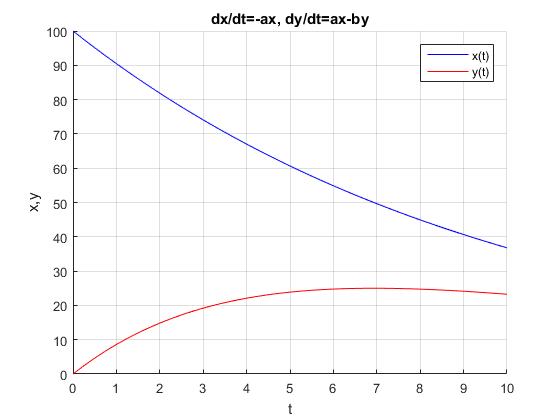
Consideremos una serie radioactiva de tres elementos A-->B-->C en la que, una sustancia radiactiva A se desintegra y se transforma en otra sustancia radiactiva B, que a su vez se desintegra y se transforma en una sustancia C estable. Las ecuaciones diferenciales que gobiernan el proceso y sus soluciones analíticas son, respectivamente,
La solución analítica que aparece a la derecha, se ha obtenido con las condiciones iniciales t=0, x=x0 e y=0. La segunda solución se obtiene siempre que a sea distinto de b. En el caso de que a sea igual a b, la solución analítica para y es
La interpretación del sistema de ecuaciones diferenciales no es complicada. En la unidad de tiempo, desaparecen ax núcleos de la sustancia A al desintegrarse (primera ecuación). En la unidad de tiempo, se producen ax núcleos de la sustancia B y a su vez desaparecen bx núcleos de la sustancia B, que al desintegrarse se transforman en núcleos de la sustancia C estable (segunda ecuación).
Escribimos un script en el que definiremos las funciones f(t,x,y), g(t,x,y), las condiciones iniciales y llamaremos a la función
a=input('parámetro a: ');
b=input('parámetro b: ');
x0=input('valor inicial de x: ');
y0=input('valor inicial de y: ');
tf=input('tiempo final, tf: ');
n=input('número de pasos, n: ');
f=@(t,x,y) -a*x;
g=@(t,x,y) a*x-b*y;
%condiciones iniciales
t0=0;
[t,x,y]=rk_2_1(f,g,t0,tf,x0,y0,n);
hold on
plot(t,x,'b')
plot(t,y,'r')
xlabel('t')
ylabel('x,y')
grid on
legend('x(t)','y(t)')
title('dx/dt=-ax, dy/dt=ax-by')
hold off
En la ventana de comandos corremos el script
parámetro a: 0.1 parámetro b: .2 valor inicial de x: 100 valor inicial de y: 0 tiempo final, tf: 10 número de pasos, n: 40
Ecuación diferencial de segundo orden
Existen muchas situaciones en las que es necesario resolver una ecuación diferencial de segundo orden.
con las condiciones iniciales
Una ecuación diferencial de segundo orden es equivalente a un sistema de dos ecuaciones diferenciales de primer orden, por lo que aplicaremos el mismo esquema.
|
|
|
|
|
|
Definimos la función
- la función f (t,x,v)
- las condiciones iniciales: posición inicial x0 y velocidad inicial v0 en el instante t0
- el número n de pasos de integración entre t0 y el tiempo final tf
Nos devuelve los vectores de las posiciones
function [t,x,v] =rk_2(f,t0,tf,x0,v0,n)
h=(tf-t0)/n;
t=t0:h:tf;
%reserva memoria para n+1 element(i)os del vect(i)or x(i)
x=zeros(n+1,1);
v=zeros(n+1,1);
x(1)=x0; v(1)=v0;
for i=1:n
k1=h*v(i);
l1=h*f(t(i),x(i),v(i));
k2=h*(v(i)+l1/2);
l2=h*f(t(i)+h/2,x(i)+k1/2,v(i)+l1/2);
k3=h*(v(i)+l2/2);
l3=h*f(t(i)+h/2,x(i)+k2/2,v(i)+l2/2);
k4=h*(v(i)+l3);
l4=h*f(t(i)+h,x(i)+k3,v(i)+l3);
x(i+1)=x(i)+(k1+2*k2+2*k3+k4)/6;
v(i+1)=v(i)+(l1+2*l2+2*l3+l4)/6;
end
end
La ecuación diferencial que describe un oscilador armónico amortiguado y su solución para unas condiciones iniciales fijadas es
Condiciones iniciales: en el instante t=0, la posición inicial es x0 y la velocidad inicial v0.
Escribimos un script en el que definiremos la función f(t,x,v), las condiciones iniciales y llamaremos a la función
w0=input('frecuencia angular w0: ');
g=input('rozamiento, gamma: ');
x0=input('posición inicial, x0: ');
v0=input('velocidad inicial,v0: ');
tf=input('tiempo final, tf: ');
n=input('número de pasos, n: ');
f=@(t,x,v) -2*g*v-w0*w0*x;
%condiciones iniciales
t0=0;
hold on
%solución numérica
[t,x,v]=rk_2(f,t0,tf,x0,v0,n);
plot(t,x,'b')
%solución analítica
w=sqrt(w0*w0-g*g);
x=((v0+g*x0)*sin(w*t)/w+x0*cos(w*t)).*exp(-g*t);
plot(t,x,'r')
grid on
xlabel('t')
ylabel('x');
legend('aproximado','exacto')
title('oscilador amortiguado')
hold off
En la ventana de comandos corremos el script oscilador con distintas condiciones iniciales
>> oscilador frecuencia angular, w0: 2 rozamiento, gamma: 0.5 posición inicial, x0: 1.5 velocidad inicial, v0: 0 tiempo final, tf: 8 número de pasos, n: 100
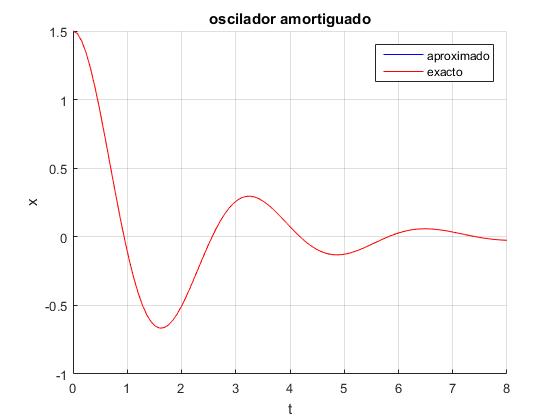
No se aprecia tampoco diferencia entre la solución exacta y la numérica, aplicando el procedimiento de Runge_Kutta.
Ejemplos en el Curso de Física
Ecuación de Lane-Emden. Interior de los cuerpos celestes
Referencias
Procedimiento de Picard