

El oscilador forzado que rebota
El oscilador forzado
La ecuación diferencial que describe las oscilaciones forzadas es
- donde ω0 es la frecuencia natural o propia del oscilador
- ωf es la frecuencia angular de la fuerza oscilante de amplitud F
- γ es la constante de amortiguamiento, γ<ω0
- δ es el desfase de la fuerza oscilante, que se utilizará más adelante
La solución de la ecuación diferencial es la suma de dos términos:
La solución de la ecuación diferencial homogénea, que describe el estado transitorio y la solución particular que describe el estado estacionario
Introduciendo la solución particular en la ecuación diferencial completa se obtienen los coeficientes A y B
Los coeficientes C y D se determinan a partir de las condiciones iniciales
La velocidad vale
Si las condiciones iniciales son t=0, x=x0, v=v0.
En el estado estacionario
La exponencial exp(-γt) tiende a cero, por lo que
x=Acos(ωf·t)+ Bcos(ωf·t)=A0sin(ωf·t+φ)
A0 es la amplitud de la oscilación forzada en el estado estacionario
Utilizando la fórmula del seno de una suma, tenemos el sistema de ecuaciones
A0·cos φ=A
A0·sin φ=B
El oscilador forzado que rebota en el origen
El choque de la partícula con la barrera hace que su velocidad cambie bruscamente de signo. Para describir su movimiento tenemos que resolver la ecuación diferencial de las oscilaciones forzadas en los intervalos de tiempo entre dos choques consecutivos, tal como se describirá en este apartado.
Primer rebote
El móvil parte en reposo v0=0, desde la posición x0 en el instante t=0, la fase de la fuerza oscilante es δ=0. Conocidas las condiciones iniciales calculamos los coeficientes C y D que describen el estado transitorio
La partícula tarda en llegar al origen x=0, un tiempo t1, alcanzando una velocidad v1.
Determinamos el instante t1 resolviendo la ecuación trascendente
Calculamos la velocidad del móvil cuando llega al origen
La partícula rebota elásticamente en la barrera cambiando el sentido de su velocidad de v1<0 a –v1>0. Hasta el próximo choque con la barrera describe una oscilación forzada. Tomamos como cero, el instante en el que rebota, de modo que las condiciones iniciales son:
t=0, x0=0, v0=-v1,
La fase de la fuerza oscilante no es cero, sino δ=ωf·t1,
Se determinan los valores de las constantes A, B, C y D de la ecuación de la posición x en función del tiempo t para describir el movimiento de la partícula tras el primer rebote.
En la parte superior de la figura, se muestra la posición de la partícula en función del tiempo, hasta el primer rebote. En la parte inferior, la gráfica de la fuerza oscilante f=F·cos(ωf·t+δ). En el instante t=t1 en el que se produce el primer rebote, la fase de la fuerza oscilante, se muestra en color rojo.
Segundo rebote
La partícula rebota y tarda en volver al origen x=0, un tiempo t2 alcanzando una velocidad v2.
Determinamos el instante t2 resolviendo la ecuación trascendente
Calculamos la velocidad del móvil v2 en el instante t2
La partícula rebota elásticamente en la barrera cambiando el sentido de su velocidad de v2<0 a –v2>0.
Tomamos como cero, el instante t=t1+t2 del segundo rebote, de modo que las condiciones iniciales son:
t=0, x0=0, v0=-v2,
La fase de la fuerza oscilante no es cero, sino δ=ωf·(t1+t2), en color rojo en la figura inferior.
Se determinan los valores de las constantes A, B, C y D de la ecuación de la posición x en función del tiempo t para describir el movimiento de la partícula tras el segundo rebote.
En la parte superior de la figura, se muestra la posición de la partícula en función del tiempo, hasta el segundo rebote. En la parte inferior, la gráfica de la fuerza oscilante f=F·cos(ωf·t+δ). En el instante t=t1+t2 en el que se produce el segundo rebote, la fase de la fuerza oscilante, se muestra en color rojo.
Tercer rebote
La partícula emplea un tiempo t3 en llagar al origen x=0, alcanzando una velocidad v3.
Determinamos el instante t3 resolviendo la ecuación trascendente
Calculamos la velocidad del móvil v3 en el instante t3
y así, sucesivamente.
Ejemplos:
Estudiamos un oscilador forzado
-
La frecuencia natural de oscilación, ω0=0.5 rad/s
-
La amplitud de la fuerza oscilante, F/m=0.25 N/kg
-
La constante de amortiguamiento, γ=0.125 s-1
-
La fase de la fuerza oscilante, δ=0
Soltamos la partícula desde una altura x0=2.0 m con velocidad v0=0 en el instante t=0.
gamma=0.125; %constante de amortiguamiento
w0=0.5; %frecuencia natural de oscilación
wf=1.28; %frecuencia de la fuerza oscilante
fuerza=0.25; %amplitud d ela fuerza oscilante
x0=2; %altura inicial de la partícula
v0=0; %velocidad inicial d ela partícula
w=sqrt(w0^2-gamma^2); %frecuencia del oscilador
dt=(2*pi/w0)/100; %paso de tiempo
%valor inicial de los coeficientes
t=0;
tRebote=0;
delta=0;
A=fuerza*((w0^2-wf^2)*cos(delta)+2*gamma*wf*sin(delta))
/((w0^2-wf^2)^2+4*gamma^2*wf^2);
B=fuerza*(2*gamma*wf*cos(delta)-(w0^2-wf^2)*sin(delta))
/((w0^2-wf^2)^2+4*gamma^2*wf^2);
C=x0-A;
D=(v0+gamma*C-wf*B)/w;
x=zeros(0,floor(40*pi/dt)); %vector posición
i=1;
for tt=0:dt:40*pi %tiempo total
f=@(t) exp(-gamma*t)*(C*cos(w*t)+D*sin(w*t))+A*cos(wf*t)+B*sin(wf*t);
g=@(t) -gamma*exp(-gamma*t)*(C*cos(w*t)+D*sin(w*t))
+w*exp(-gamma*t)*(-C*sin(w*t)+D*cos(w*t))+wf*(-A*sin(wf*t)+B*cos(wf*t));
x(i)=f(t);
if x(i)<0
t0=fzero(f,[t-dt, t]);
tRebote=tRebote+t0;
v0=-g(t0);
delta=wf*tRebote;
x0=0;
A=fuerza*((w0^2-wf^2)*cos(delta)+2*gamma*wf*sin(delta))
/((w0^2-wf^2)^2+4*gamma^2*wf^2);
B=fuerza*(2*gamma*wf*cos(delta)-(w0^2-wf^2)*sin(delta))
/((w0^2-wf^2)^2+4*gamma^2*wf^2);
C=x0-A;
D=(v0+gamma*C-wf*B)/w;
t=0.0; %tiempo parcial
x(i)=0.0;
end
i=i+1;
t=t+dt;
end
t=0:dt:40*pi;
plot(t,x)
grid on
xlabel('t')
ylabel('x')
title('Posición en función del tiempo')
Ejemplo 1:
En la figura, se muestra el comportamiento del oscilador cuando la frecuencia de la fuerza oscilante es ωf=1.28 rad/s
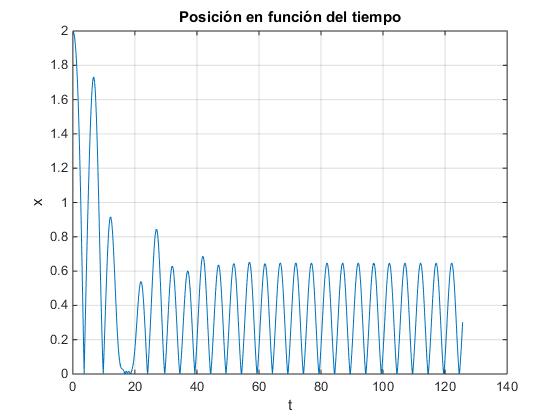
Después de un estado transitorio que dura algunas oscilaciones, la partícula rebota hasta alcanzar una única altura máxima. El movimiento de la partícula se repite después de cada rebote
Ejemplo 2:
En la figura, se muestra el comportamiento del oscilador cuando la frecuencia de la fuerza oscilante es ωf=1.33 rad/s
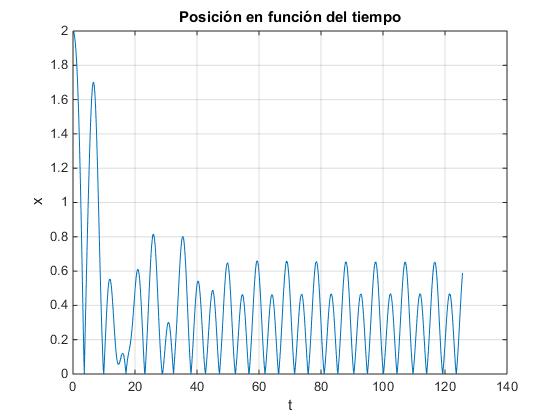
Después de un estado transitorio que dura varias oscilaciones, la partícula rebota hasta dos alturas diferentes. El sistema precisa de dos rebotes para completar un ciclo.
Aumentamos un poco la frecuencia ωf, y observamos que en el estado estacionario se alcanzan cuatro alturas máximas distintas, el sistema precisa de cuatro rebotes para completar un ciclo, y así sucesivamente...
Ejemplo 3:
En la figura, se muestra el comportamiento del oscilador cuando la frecuencia de la fuerza oscilante es ωf=1.41 rad/s
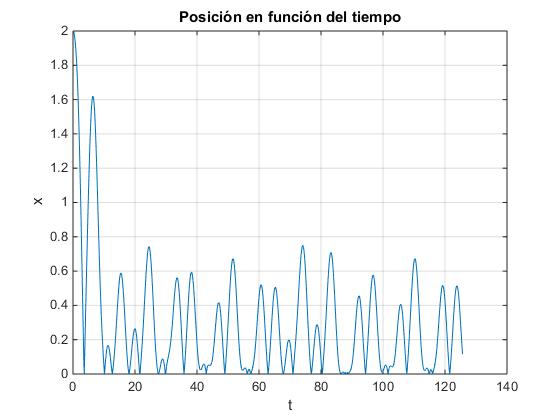
Observamos que la partícula rebota hasta múltiples alturas diferentes. El movimiento del sistema nunca se repite es caótico, el periodo es infinito.
Actividades
Se introduce
-
La constante de amortiguamiento γ, en el control titulado Amortiguamiento
-
La amplitud F de la fuerza oscilante, en el control titulado Amplitud
-
La frecuencia ωf (rad/s) de la fuerza oscilante, en el control titulado Frecuencia
-
La frecuencia propia o natural del oscilador se ha fijado en ω0=0.5 rad/s
-
La posición inicial x0, desde la que se suelta la partícula, con velocidad inicial v0=0, en el control titulado Posición inicial
Se pulsa el botón titulado Nuevo.
Se observa el movimiento de la partícula unida al muelle elástico y la representación gráfica de su posición en función del tiempo (en color rojo)
Una flecha de color rojo al lado de la partícula muestra el módulo, dirección y sentido de la fuerza oscilante en cada instante. Una flecha de color azul, representa el vector velocidad. Cuando la fuerza y la velocidad tienen el mismo sentido, el oscilador gana energía, cuando tienen sentidos contrarios pierde energía. Imaginemos un niño en un columpio, cuando le empujamos en la dirección y sentido de su movimiento, el columpio gana energía y aumenta su amplitud. Cuando lo empujamos cuando viene hacia nosotros el columpio pierde energía y disminuye su amplitud.
En la parte inferior, se representa la fuerza oscilante f=F·cos(ωf·t)
Se sugiere al lector que, observe el comportamiento de la partícula para varios valores de la frecuencia ωf de la fuerza oscilante.
Manteniendo fija, la frecuencia ωf de la fuerza oscilante, se puede cambiar la posición inicial x0 de la partícula y observar su efecto en su movimiento posterior.
Respuesta en amplitud
En el programa interactivo (más abajo), se dibuja en color azul la respuesta en amplitud del oscilador lineal forzado, es decir, la variación de la amplitud con la frecuencia ωf de la fuerza oscilante y en color rojo, la respuesta en amplitud del oscilador forzado que rebota.
En el primer caso, vemos que la amplitud alcanza un máximo en las cercanías de de la frecuencia propia ω0=0.5 rad/s.
En el segundo caso, definimos la amplitud como el máximo desplazamiento de la partícula entre dos rebotes consecutivos. La curva presenta un máximo para la frecuencia ωf=1.0 rad/s, y también otros picos secundarios, pero el aspecto más sobresaliente, es la presencia de intervalos de frecuencia donde la amplitud no es única.
Para obtener esta curva se ha procedido del siguiente modo: se deja a la partícula rebotar 100 veces para asegurarnos, que se ha alcanzado el estado estacionario. Después, se representa la máxima altura que alcanza la partícula cuando rebota sucesivamente 200 veces con la barrera para cada una de las frecuencias ωf.
Cuando se elige el intervalo 0<ωf <5, se observan, de un vistazo, las regiones (intervalos de frecuencias) donde la partícula, rebota alcanzando una única altura máxima, de aquellas en las que alcanza múltiples alturas, donde los puntos están verticalmente dispersos. Por tanto, observamos que un sistema físico simple, el oscilador forzado que rebota, presenta un comportamiento complejo.
Actividades
Se introduce
- El intervalo de frecuencias de la fuerza oscilante, en los controles titulados ωf Frecuencia inicial y Frecuencia final
- La constante de amortiguamiento γ, en el control titulado Amortiguamiento
Se ha fijado,
- La frecuencia propia o natural del oscilador en ω0=0.5 rad/s
- La amplitud de la fuerza oscilante, F/m=0.25 N/kg
Se pulsa el botón titulado Nuevo
Se aconseja examinar en primer lugar, el intervalo (0.1, 5), después elegir un intervalo más pequeño, por ejemplo (1.3, 1.6), (2.3, 2.6), etc.
Referencias
Walker J. S., Soule T. Chaos in a simple impact oscillator: The Bender bouncer. Am. J. Phys. 64 (4) April 1996, pp. 397-409
Tipler. Física. Editorial Reverté (1994). Capítulo 12, págs. 397-402