El oscilador forzado
El estado estacionario
Expresamos la solución particular de la ecuación diferencial que describe el oscilador forzado, de la forma
x2=Acos(ωf t)+Bsin(ωf t)
o de la forma equivalente
Obtendremos los valores de A0 y δ a través de los parámetros A y B de la solución particular de la ecuación diferencial que ya hemos calculado.
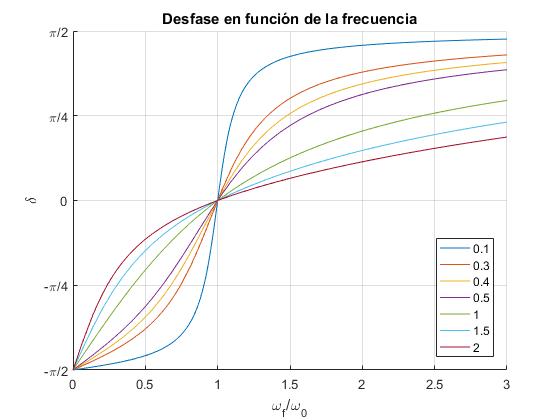
El cosδ es siempre positivo y el sinδ es positivo cuando ωf>ω0 y negativo cuando ωf<ω0. Es decir, el desfase δ varía entre -π/2 y +π/2.
Comparamos el estado transitorio y su evolución hacia el estado estacionario, de un oscilador que parte del origen x0=0, en reposo, v0=0
Establecemos los siguientes valores:
- Coeficiente de rozamiento γ=7;
- Frecuencia angular propia, ω0=100 rad/s y
- Frecuencia de la fuerza oscilante, ωf=120 rad/s
wf=120; %frecuencia de la fuerza oscilante
w0=100; %frecuencia natural
gamma=7; %amortiguamiento
w=sqrt(w0^2-gamma^2);
x=@(t) ((w0^2-wf^2)*(cos(wf*t)-exp(-gamma*t).*cos(w*t))+
2*gamma*wf*(sin(wf*t)-(w0^2+wf^2)*exp(-gamma*t).*sin(w*t)/(2*w*wf)))
/((w0^2-wf^2)^2+4*gamma^2*wf^2);
%estado estacionario
A=1/sqrt((w0^2-wf^2)^2+4*gamma^2*wf^2);
delta=atan((wf^2-w0^2)/(2*gamma*wf));
hold on
fplot(x,[0,0.2*pi])
fplot(@(t) A*sin(wf*t-delta),[0,0.2*pi])
hold off
grid on
legend('transitorio','estacionario','Location','southeast')
xlabel('t')
ylabel('\theta')
title('Oscilaciones forzadas')
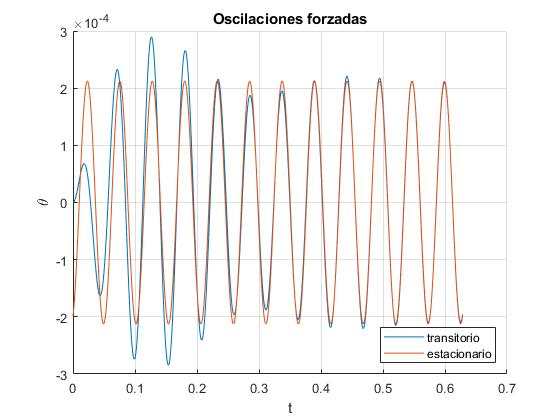
Al cabo de un cierto tiempo t≈0.5 s, el estado estacionario coincide con el transitorio
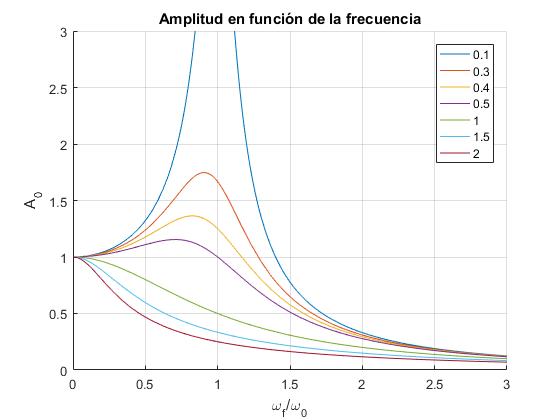
En la figura (más abajo), se muestra la respuesta en amplitud de la oscilación forzada, en el estado estacionario.
Derivando la expresión de la amplitud A0 en función de la frecuencia de la fuerza oscilante, respecto de ωf, e igualando a cero, obtenemos la frecuencia ωf para la cual la amplitud en el estado estacionario presenta un máximo
- En el caso ideal de que no existiese rozamiento γ=0, la amplitud de la oscilación forzada se haría muy grande, tendería a infinito, cuando la frecuencia ωf de la fuerza oscilante es igual a la frecuencia propia del oscilador ω0.
- En el caso habitual de que exista rozamiento (γ>0), la amplitud se hace máxima cuando la frecuencia ωf de la fuerza oscilante es próxima a la natural del oscilador ω0
La característica esencial del estado estacionario, es que la velocidad de la partícula
está en fase δ=0 con la fuerza oscilante cuando la frecuencia de la fuerza oscilante ωf es igual a la frecuencia propia del oscilador ω0.
Expresamos la amplitud A0 y la fase δ en términos de los cocientes r=ωf/ω0 y ξ=γ/ω0.
Representamos la amplitud en función de r=ω/ω0 para varios valores de la constante de amortiguamiento ξ
hold on
for x=[0.1 0.3 0.4 0.5 1 1.5 2]
f=@(r) 1./sqrt((r.^2-1).^2+4*r.^2*x^2);
fplot(f,[0,3],'displayName',num2str(x))
end
hold off
ylim([0 3])
grid on
title('Amplitud en función de la frecuencia')
xlabel('\omega_f/\omega_0')
ylabel('A_0')
legend('-DynamicLegend','location','Northeast')
Representamos la fase δ en función de r=ω/ω0 para varios valores de la constante de amortiguamiento ξ
hold on
for x=[0.1 0.3 0.4 0.5 1 1.5 2] %amortiguamiento
f=@(r) atan((r.^2-1)./(2*r*x));
fplot(f,[0,3],'displayName',num2str(x))
end
hold off
set(gca,'YTick',-pi/2:pi/4:pi/2)
set(gca,'YTickLabel',{'-\pi/2','-\pi/4','0','\pi/4','\pi/2'})
grid on
ylim([-pi/2,pi/2])
title('Desfase en función de la frecuencia')
xlabel('\omega_f/\omega_0')
ylabel('\delta')
legend('-DynamicLegend','location','Southeast')
Práctica de laboratorio
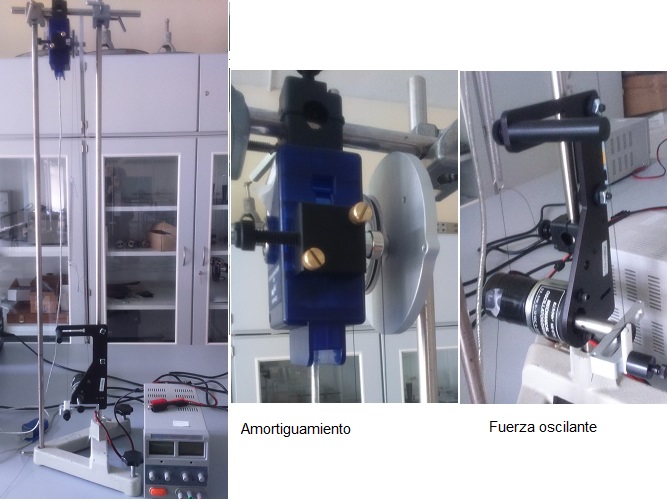
Con el dispositivo de PASCO, medimos el periodo P0=1.45 s y frecuencia f0=1/1.45 Hz, de las oscilaciones libres
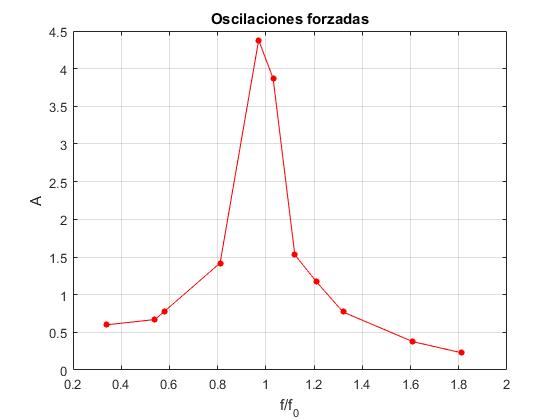
Conectamos la fuerza oscilante, un motor de velocidad angular variable a un generador de corriente contínua, esperamos un tiempo hasta que decaiga el estado transitorio. Las medidas de la amplitud A y del periodo Pf de las oscilaciones en el estado estacionario, tomadas por una estudiante de primer curso del Grado en Ingeniería de Energías Renovables han sido las siguientes:
| Pf (s) | f/f0 | A |
|---|---|---|
| 4.2 | 0.34 | 0.60 |
| 2.7 | 0.54 | 0.67 |
| 2.5 | 0.58 | 0.78 |
| 1.8 | 0.81 | 1.42 |
| 1.5 | 0.97 | 4.38 |
| 1.4 | 1.03 | 3.87 |
| 1.3 | 1.12 | 1.53 |
| 1.2 | 1.21 | 1.17 |
| 1.1 | 1.32 | 0.77 |
| 0.9 | 1.61 | 0.37 |
| 0.8 | 1.81 | 0.23 |
x=[0.34,0.54,0.58,0.81,0.97,1.03,1.12,1.21,1.32,1.61,1.81];
y=[0.60,0.67,0.78,1.42,4.38,3.87,1.53,1.17,0.77,0.376,0.23];
plot(x,y,'-ro','markersize',4,'markeredgecolor','r','markerfacecolor','r')
grid on
xlabel('f/f_0')
ylabel('A')
title('Oscilaciones forzadas')
Energía del oscilador forzado. Resonancia
La energía de la partícula de masa m unida a un muelle elástico de constante k es la suma de la energía cinética y potencial
El trabajo W1 de la fuerza oscilante es
El trabajo W2 de la fuerza de rozamiento es
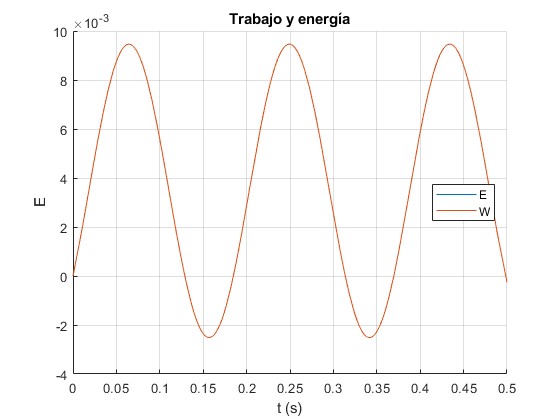
Comprobamos que el trabajo de ambas fuerzas es igual a la variación de la energía del sistema formado por la partícula unida al muelle elástico
m=1; %masa
F0=1; %fuerza
g=1/2; %gamma
w0=16; %frecuencia angular natural
wf=17; %frecuencia de la fuerza oscilante
A=(F0/m)/sqrt((w0^2-wf^2)^2+4*g^2*wf^2); %amplitud
delta=atan((wf^2-w0^2)/(2*g*wf)); %fase
%energía
E=@(t) m*A^2*(w0^2*sin(wf*t-delta).^2+wf^2*cos(wf*t-delta).^2)/2;
%trabajo de la fuerza oscilante
W1=@(t) F0*A*(cos(delta)*(wf*t+sin(2*wf*t)/2)+sin(delta)*(1-cos(2*wf*t))/2)/2;
%trabajo de la fuerza de rozamiento
W2=@(t) -(wf*t+sin(2*wf*t-2*delta)/2+sin(2*delta)/2)*g*m*A^2*wf;
hold on
e=@(t) E(t)-E(0);
w=@(t) W1(t)+W2(t);
fplot(e, [0,0.5])
fplot(w, [0,0.5])
hold off
grid on
xlabel('t (s)')
ylabel('E,W')
title('Trabajo y energía')
La función W1(t)+W2(t) coincide con la función E(t)-E(0)
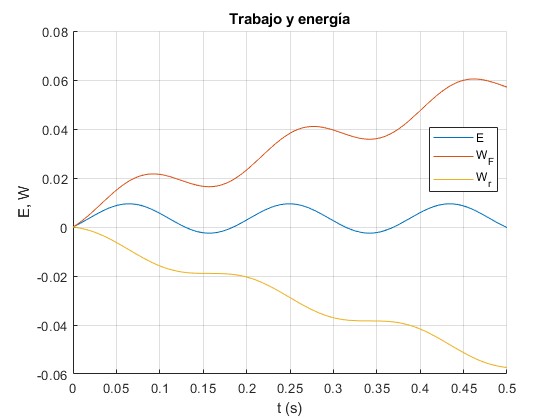
Representamos por separado el trabajo de la fuerza oscilante W1(t), el trabajo de la fuerza de rozamiento W2(t) y la variación de energía, E(t)-E(0)
F0=1; %fuerza
g=1/2; %gamma
w0=16; %frecuencia angular natural
wf=17; %frecuencia de la fuerza oscilante
A=(F0/m)/sqrt((w0^2-wf^2)^2+4*g^2*wf^2); %amplitud
delta=atan((wf^2-w0^2)/(2*g*wf)); %fase
%energía
E=@(t) m*A^2*(w0^2*sin(wf*t-delta).^2+wf^2*cos(wf*t-delta).^2)/2;
%trabajo de la fuerza oscilante
W1=@(t) F0*A*(cos(delta)*(wf*t+sin(2*wf*t)/2)+sin(delta)*(1-cos(2*wf*t))/2)/2;
%trabajo de la fuerza de rozamiento
W2=@(t) -(wf*t+sin(2*wf*t-2*delta)/2+sin(2*delta)/2)*g*m*A^2*wf;
hold on
e=@(t) E(t)-E(0);
fplot(e, [0,0.5])
fplot(W1, [0,0.5])
fplot(W2, [0,0.5])
hold off
grid on
xlabel('t (s)')
legend('E','W_F','W_r','location','best')
ylabel('E,W')
title('Trabajo y energía')
Resonancia
Denotemos por valor medio de una función periódica f(t) de periodo P a
Calculemos el valor medio de la energía por unidad de tiempo suministrada por la fuerza oscilante
El valor medio de la energía por unidad de tiempo que disipa el oscilador a causa de su interacción con el medio que le rodea. Dicha interacción se describe en términos de una fuerza de rozamiento proporcional a la velocidad λv.
En el estado estacionario
x=A0·sin(ωf·t-δ)
v=ωf·A0·cos(ωf·t-δ)
Haciendo algunas operaciones, se obtiene la misma expresión para P1 y para P2.
Nota: para el cálculo con MATLAB utilizamos la expresión de x=A·cos(ωf·t)+B·sin(ωf·t) de la solución de la ecuación diferencial en vez de x=A0·sin(ωf·t-δ) del párrafo anterior.
>> syms F wf w0 g t; >> A=F*(w0^2-wf^2)/((w0^2-wf^2)^2+4*wf^2*g^2); >> B=2*g*wf*F/((w0^2-wf^2)^2+4*wf^2*g^2); >> x=A*cos(wf*t)+B*sin(wf*t); >> v=diff(x,t); >> p=F*cos(wf*t)*v; >> pot_1=int(p,t,0,P)/P %integramos respecto de t entre los límites 0 y P pot_1 =(F^2*g*wf^2)/((w0^2 - wf^2)^2 + 4*g^2*wf^2) >> f=2*g*v^2; >> P=2*pi/wf; %periodo >> pot_2=int(f,t,0,P)/P pot_2 =(F^2*g*wf^2)/(w0^4 + wf^4 + wf^2*(4*g^2 - 2*w0^2))
En el estado estacionario, el valor medio de la energía por unidad de tiempo suministrada por la fuerza oscilante, es igual al valor medio de la energía por unidad de tiempo que disipa el oscilador a causa de su interacción con el medio que le rodea. Manteniéndose la energía del oscilador forzado constante en valor medio.
Escribimos la expresión anterior de una forma más simple
Cuando la frecuencia ωf de la fuerza oscilante es igual a la frecuencia ω0 natural del oscilador la fuerza oscilante F0·cos(ωf t) y la velocidad v del oscilador están en fase δ=0, el valor medio de la energía por unidad de tiempo P suministrada por la fuerza oscilante es máxima. Esta situación recibe el nombre de resonancia.
La representación de la potencia P en función de X tiene la forma de la curva acampanada de la figura. El máximo de la potencia P se obtiene para X=0, o bien, cuando la frecuencia ωf de la fuerza oscilante es igual a la frecuencia ω0 natural del oscilador.
Vemos también que la función es simétrica, tiene el mismo valor para X positivos y X negativos, y que P tiende rápidamente a cero a medida que X se hace mayor o menor que cero, es decir, a medida que la frecuencia ωf de la fuerza oscilante se hace mayor o menor que la frecuencia ω0 propia del oscilador.
La anchura es otra característica importante de la curva. Se define como el intervalo de frecuencias de la fuerza oscilante para los cuales la potencia P es mayor que la mitad de la máxima. El intervalo de frecuencias ωf alrededor de la frecuencia ω0 propia del oscilador está comprendido entre X=-1 a X=+1, y vale aproximadamente 2γ.
En la figura, se representan dos curvas con la misma frecuencia de resonancia pero con disinta anchura.
El acelerómetro
Un acelerómetro consta de un sistema masa-muelle elástico con rozamiento proporcional a la velocidad, situado sobre un soporte que vibra con frecuencia angular ω, de la forma y(t)=y0sin(ωt) y por tanto, con aceleración
La aguja indicadora unida a la masa m, señala en la escala el desplazamiento relativo z(t)=x(t)-y(t).
En la parte derecha de la figura, hemos dibujado las fuerzas sobre la partícula de masa m. La ecuación del movimiento es
El muelle de constante k se deforma x-y. La velocidad relativa de la partícula es dx/dt-dy/dt por tanto, la fuerza de rozamiento es proporcional a esta velocidad
que es similar a la ecuación diferencial de las oscilaciones forzadas. La solución particular es z=Asin(ωt)+Bcos(ωt), que es la que corresponde al estado estacionario.
Introducimos z e la ecuación diferencial y obtenemos el sistema de dos ecuaciones
Calculamos la amplitud z0 y la fase δ de la expresión equivalente, z=z0sin(ωt-δ)
Llamando r=ω/ω0 y ξ=γ/ω0
Representamos la amplitud z0/y0 en función de r para varios valores de la constante de amortiguamiento ξ
hold on
for x=[0,0.3,0.5,0.7,1]
z=@(r) (r.^2)./sqrt((1-r.^2).^2+4*x^2*r.^2);
fplot(z,[0,5],'displayName',num2str(x))
end
hold off
grid on
ylim([0,3])
legend('-DynamicLegend','location','northeast')
xlabel('r')
ylabel('z_0/y_0')
title('Amplitud')
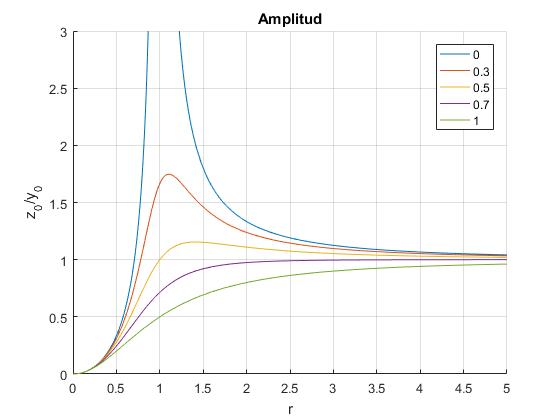
Como podemos apreciar, la amplitud z0/y0≈1 para r grande. Midiendo z0 sabemos y0 con un cierto margen de error
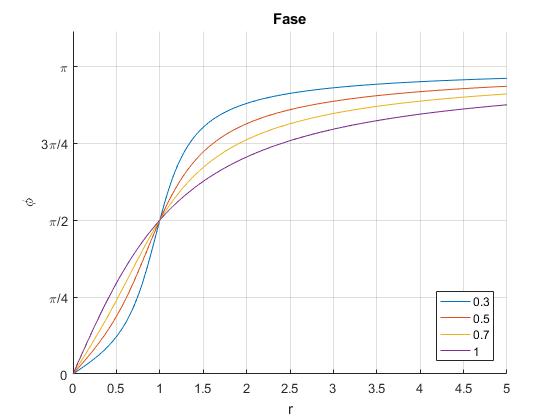
Representamos la fase δ para varios valores de la constante de amortiguamiento ξ
hold on
r=linspace(0,5,100);
for x=[0.3,0.5,0.7,1]
phi=atan(2*x*r./(1-r.^2));
phi=(phi<0)*pi+phi;
plot(r,phi,'displayName',num2str(x))
end
hold off
grid on
legend('-DynamicLegend','location','southeast')
set(gca,'YTick',0:pi/4:pi)
set(gca,'YTickLabel',{'0','\pi/4','\pi/2','3\pi/4','\pi'})
xlabel('r')
ylabel('\delta')
title('Fase')