

Movimiento de una partícula cargada en el campo de un dipolo magnético
Movimiento de una partícula cargada en un campo magnético no uniforme
Una partícula de masa M y carga q se mueve en el campo magnético producido por un dipolo situado en el origen de momento . El campo magnético producido por el dipolo tiene las expresión
La partícula cargada en el instante t está en el punto P cuyo vector posición es .
En los puntos del plano XY (z=0) distantes r0 del origen, el campo magnético vale
La expresión del campo magnético en términos del módulo B0 es
La fuerza que ejerce el campo magnético sobre la partícula cargada es
Las ecuaciones del movimiento son
Definimos nuevas variables: ω=|q|B0/M, X=x/r0, Y=y/r0, Z=z/r0, τ=ωt
Dado que la fuerza F no realiza trabajo por ser perpendicular al desplazamiento, la energía cinética se mantiene constante
Supondremos que la partícula cargada es positiva, q/|q|=1. Resolvemos el sistema de tres ecuaciones diferenciales por procedimientos numéricos, con las siguientes condiciones iniciales
Para verificar el procedimiento numérico comparamos la energía cinética inicial E0 de la partícula, y la final, Ef. El error cometido es
Para observar el movimiento de la partícula se precisa de mucho tiempo, el error acumulado veremos que es importante.
f=@(t,x) [x(2); ((2*x(5)^2-x(3)^2-x(1)^2)*x(4)
-3*x(3)*x(5)*x(6))/(x(1)^2+x(3)^2+x(5)^2)^(5/2); x(4);
-((2*x(5)^2-x(3)^2-x(1)^2)*x(2)-3*x(1)*x(5)*x(6))/(x(1)^2+x(3)^2+x(5)^2)^(5/2);
x(6); 3*x(5)*(x(3)*x(2)-x(1)*x(4))/(x(1)^2+x(3)^2+x(5)^2)^(5/2)];
[t,x]=ode45(f,[0,1328],[1,0.005, 1,0.005, 0,0.01]);
plot(t,x(:,5))
E0=x(1,2).^2+x(1,4).^2+x(1,6).^2;
Ef=x(end,2).^2+x(end,4).^2+x(end,6).^2;
error=abs((Ef-E0)/E0)*100;
fprintf('Error %1.3f\n',error)
grid on
xlabel('\tau')
ylabel('Z');
title('Movimiento en un dipolo magnético')
Para observar el movimiento en el eje X e Y, se toma un τmáx=25 850
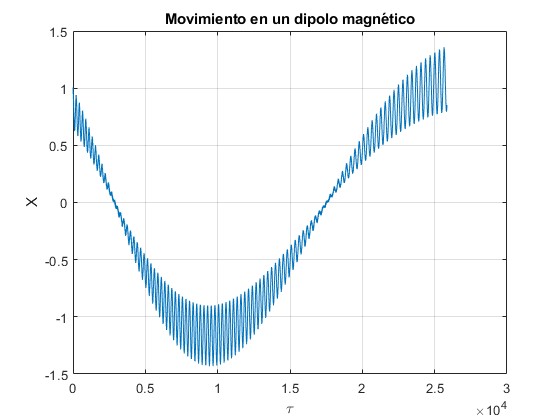
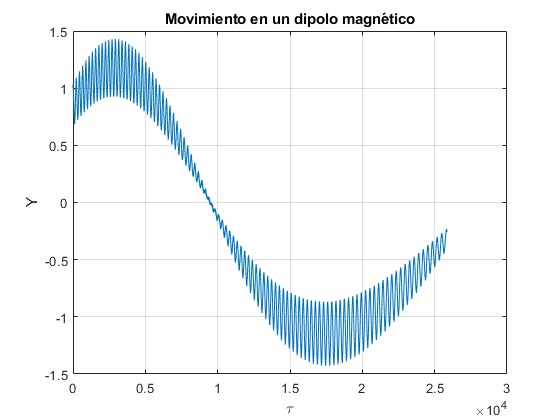
Error 49.568
Un error de casi el 50% es importante
Estas dos representaciones gráficas sugieren que hay dos periodos o tiempos característicos del movimiento: uno corto y otro mucho más largo, del valor medio de la posición X o Y de la partícula
Para observar el movimiento en el eje Z , se toma un τmáx=1 328
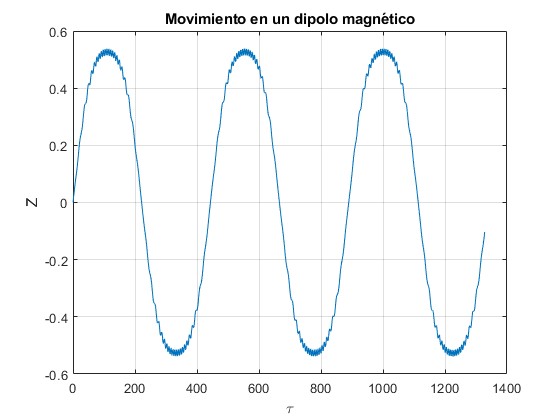
Error 4.770
Otro periodo lo observamos en el movimiento de la partícula a lo largo del eje Z
Representamos la trayectoria de la partícula cargada, cambiando las líneas de código por éstas
...
plot3(x(:,1),x(:,3),x(:,5))
grid on
xlabel('X')
ylabel('Y');
zlabel('Z');
title('Movimiento en un dipolo magnético')
Movimiento de una partícula cargada en un campo magnético no uniforme
Una partícula de masa m y carga q se mueve en un campo magnético no uniforme
La ecuación del movimiento es
Que da lugar a un sistema de tres ecuaciones diferenciales
con ω=qB/m. La primera ecuación diferencial se puede integrar
Donde C es una constante de integración que determinaremos a partir de las condiciones iniciales en el instante t=0
Conocido dx/dt, las otras dos ecuaciones diferenciales se expresan
Tenemos, por tanto, un sistema formado por una ecuación diferencial de primer orden y de dos ecuaciones diferenciales de segundo orden, que vamos a expresar de forma adimensional. Multiplicamos la primera ecuación diferencial por α/ω, la segunda y tercera por α/ω2, y expresamos las ecuaciones diferenciales en términos de X=α·x, Y=α·y, Z=α·z, τ=ω·t y D=αC/ω
Resolvemos este sistema de ecuaciones diferenciales con las siguientes condiciones iniciales: En el instante τ=0, la posición inicial es X=0, Y=Y0, X=0, la velocidad inicial es dX/dτ=Ux, dY/dτ=0, dZ/dτ=Uz.
La constante de integración D que aprece en la primera ecuación diferencial, se determina a partir de las condiciones iniciales, en el instante τ=0, Ux=Y0+D
Resultados
Sea Y0=0.66, Ux=0.02, Uz=0.08. Resolvemos el sistema de ecuaciones diferenciales hasta el tiempo τ=140
Coordenada X en función del tiempo τ
%X=x(1), Y=x(2), dY/dt=x(3), Z=x(4), dZ/dt=x(5)
x0=[0, 0.66, 0, 0, 0.08]; %condiciones iniciales
tf=140; %tiempo final
D=0.02-x0(2); %constante de integración
fg=@(t,x)[(1+x(4))*x(2)+D; x(3); -(1+x(4))^2*x(2)-D*(1+x(4));
x(5); -(1+x(4))*x(2)^2-D*x(2)];
[t,x]=ode45(fg,[0,tf],x0);
plot(t,x(:,1))
grid on
xlabel('\tau')
ylabel('X');
title('X en función de \tau')
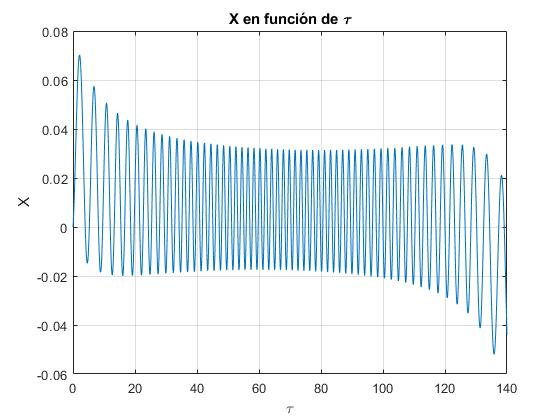
Comprobamos que la energía de la partícula se mantiene constante, ya que la fuerza que ejerce el campo magnético es siempre perpendicular al desplazamiento de la partícula
>> ((1+x(:,4)).*x(:,2)+D).^2+x(:,3).^2+x(:,5).^2
ans =
0.0068
0.0068
......
0.0067
0.0067
0.0067
>> 0.02^2+0.08^2
ans = 0.0068
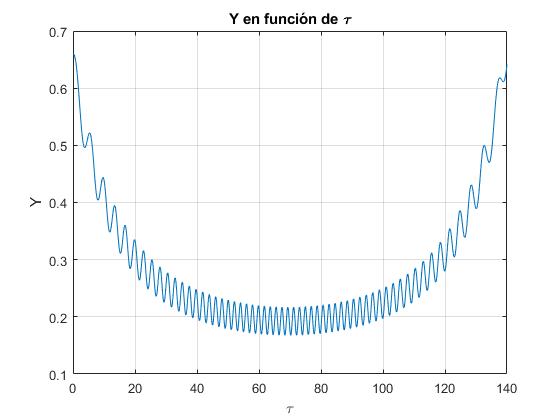
Coordenada Y en función del tiempo τ
%X=x(1), Y=x(2), dY/dt=x(3), Z=x(4), dZ/dt=x(5)
x0=[0, 0.66, 0, 0, 0.08]; %condiciones iniciales
tf=140; %tiempo final
D=0.02-x0(2); %constante de integración
fg=@(t,x)[(1+x(4))*x(2)+D; x(3); -(1+x(4))^2*x(2)-D*(1+x(4));
x(5); -(1+x(4))*x(2)^2-D*x(2)];
[t,x]=ode45(fg,[0,tf],x0);
plot(t,x(:,2))
grid on
xlabel('\tau')
ylabel('Y');
title('Y en función de \tau')
Coordenada Z en función del tiempo τ
%X=x(1), Y=x(2), dY/dt=x(3), Z=x(4), dZ/dt=x(5)
x0=[0, 0.66, 0, 0, 0.08]; %condiciones iniciales
tf=140; %tiempo final
D=0.02-x0(2); %constante de integración
fg=@(t,x)[(1+x(4))*x(2)+D; x(3); -(1+x(4))^2*x(2)-D*(1+x(4));
x(5); -(1+x(4))*x(2)^2-D*x(2)];
[t,x]=ode45(fg,[0,tf],x0);
plot(t,x(:,4))
grid on
xlabel('\tau')
ylabel('Z');
title('Z en función de \tau')
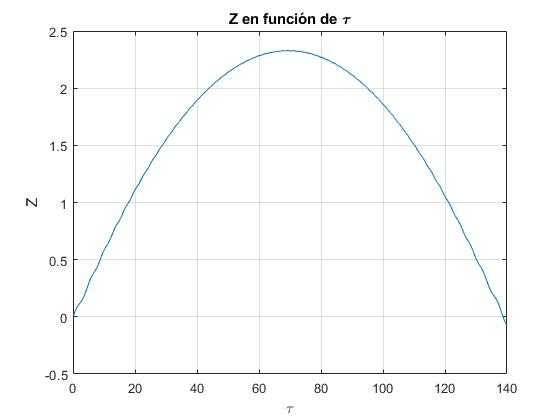
La coordenada Z alcanza un máximo Zm=2.33 en el tiempo τm=69.3
>> [xmax, nmax]=max(x(:,4)) xmax = 2.3292 nmax = 858 >> t(nmax) ans = 69.2907
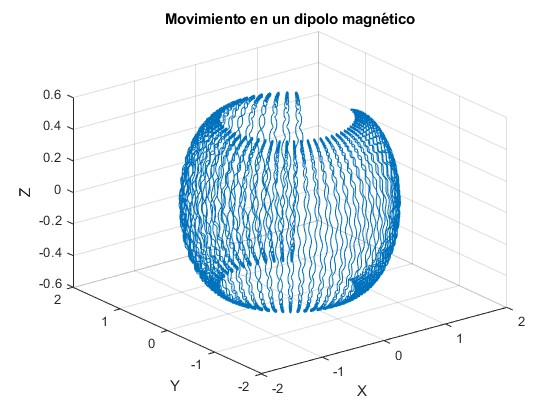
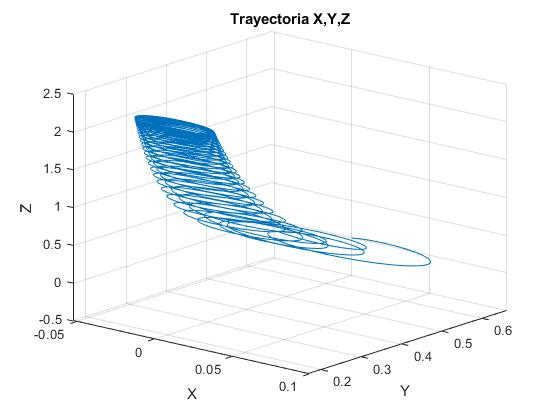
La trayectoria en el espacio X, Y, Z
%X=x(1), Y=x(2), dY/dt=x(3), Z=x(4), dZ/dt=x(5)
x0=[0, 0.66, 0, 0, 0.08]; %condiciones iniciales
tf=140; %tiempo final
D=0.02-x0(2); %constante de integración
fg=@(t,x)[(1+x(4))*x(2)+D; x(3); -(1+x(4))^2*x(2)-D*(1+x(4));
x(5); -(1+x(4))*x(2)^2-D*x(2)];
[t,x]=ode45(fg,[0,tf],x0);
plot3(x(:,1),x(:,2),x(:,4))
grid on
xlabel('X')
ylabel('Y');
zlabel('Z')
title('Trayectoria X,Y,Z')
view(40,20)
La trayectoria en el plano Z, Y
%X=x(1), Y=x(2), dY/dt=x(3), Z=x(4), dZ/dt=x(5)
x0=[0, 0.66, 0, 0, 0.08]; %condiciones iniciales
tf=140; %tiempo final
D=0.02-x0(2); %constante de integración
fg=@(t,x)[(1+x(4))*x(2)+D; x(3); -(1+x(4))^2*x(2)-D*(1+x(4));
x(5); -(1+x(4))*x(2)^2-D*x(2)];
[t,x]=ode45(fg,[0,tf],x0);
plot(x(:,4),x(:,2))
%plot(x(:,1),x(:,2))
grid on
xlabel('Z')
ylabel('Y');
title('Trayectoria Z,Y')
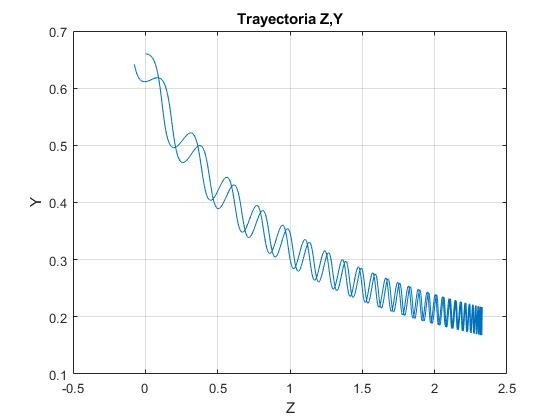
La partícula cargada se refleja en el instante τm en la posición Zm
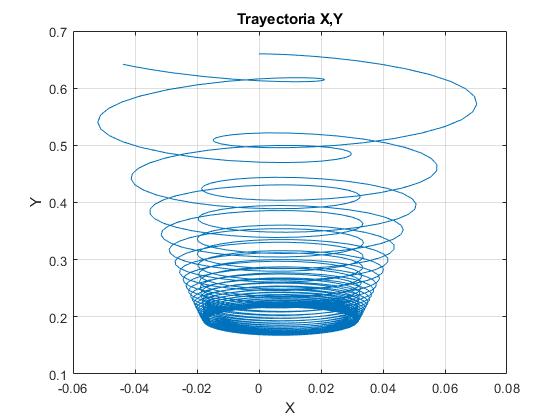
La trayectoria en el plano X, Y
%X=x(1), Y=x(2), dY/dt=x(3), Z=x(4), dZ/dt=x(5)
x0=[0, 0.66, 0, 0, 0.08]; %condiciones iniciales
tf=140; %tiempo final
D=0.02-x0(2); %constante de integración
fg=@(t,x)[(1+x(4))*x(2)+D; x(3); -(1+x(4))^2*x(2)-D*(1+x(4));
x(5); -(1+x(4))*x(2)^2-D*x(2)];
[t,x]=ode45(fg,[0,tf],x0);
plot(x(:,1),x(:,2))
grid on
xlabel('X')
ylabel('Y');
title('Trayectoria X,Y')
Referencias
J. Pierrus. Solved Problems in Classical Electromagnetism. Analytical and numerical solutions with comments. Oxford University Press (2018). Questions 4.22, 4.23, pp. 231-234.
O. L. de Lange, J. Pierrus Solved Problems in Classical Mechanics. Analytical and numerical solutions with comments. Question 7.23, pp. 201-205