

Movimiento de dos cargas del mismo signo en campo magnético uniforme
Como vemos en la figura, las fuerzas de repulsión eléctrica, son iguales y opuestas. Cuando se liberan las partículas de su posición inicial, se mueven a lo largo del eje X, y actúa la fuerza magnética,
La fuerza que ejerce el campo magnético, sobre cada una de las cargas en movimiento son iguales y opuestas. Si la partícula de la derecha se encuentra en el instante t en la posición (x,y), la partícula de la izquierda se encontrará en el mismo instante en la posición (-x,-y). El origen O es centro de simetría y por tanto, la línea que une ambas partículas pasa por el origen. Debido a esta simetría solamente precisaremos calcular la trayectoria de una de las partículas, la que está a la derecha del origen.
Comparamos un sistema formado por dos cargas positivas (en rojo) y el formado por dos cargas negativas (en azul), vemos que la fuerza eléctrica es la misma, y la fuerza magnética cambia de signo. De modo que, la carga positiva y la carga negativa describen trayectorias similares, simétricas respecto del eje X, la carga positiva recorrerá la trayectoria en el sentido de las agujas del reloj y la negativa en el sentido contrario.
Deduciremos la ecuación de la trayectoria suponiendo que las dos cargas son positivas
Analizamos el movimiento de la partícula cargada positivamente situada en el instante t=0 en la posición (r0,0)
La fuerza de repulsión eléctrica entre las dos cargas tiene dirección radial y vale
El campo magnético, paralelo al eje Z, , ejerce una fuerza sobre la partícula cargada en movimiento con velocidad v
Teniendo en cuenta los productos de los vectores unitarios . Además, en este problema, es conveniente expresar la velocidad y aceleración en coordenadas polares (al final de esta página)
Las ecuaciones del movimiento son
Se resuelve el sistema de dos ecuaciones diferenciales con las siguientes condiciones iniciales.
Este es el planteamiento del problema sugerido por el primer artículo citado en las referencias. El que se va a dar a continuación es el de un sistema de dos partículas interactuantes que se estudia en la página titulada Movimiento del c.m. y de las partículas de un sistema (I) y posteriores. Dividiremos el problema en dos partes:
- Movimiento del centro de masas del sistema de dos partículas
Movimiento relativo de las dos partículas
Sistema de dos partículas
En la figura, se muestran dos cargas iguales +q, de la misma masa m, cuyas posiciones en el instante t son y
Las fuerzas de repulsión eléctrica, son iguales y opuestas.
Donde es el vector posición relativa
La fuerza magnética, es perpendicular al producto vectorial de la velocidad de la partícula y del campo magnético, cuya dirección es el eje Z,
Las ecuaciones del movimiento son
Ecuación del movimiento del centro de masas
Ecuación del movimiento relativo de las dos partículas
Sumamos las ecuaciones
El centro de masas describe una trayectoria circular de radio R0 centrada en el origen, con velocidad angular ω. Escribimos la ecuación de la dinámica del movimiento circular uniforme
Siendo V=dR/dt la velocidad del centro de masas
El periodo P o tiempo que trda en dar una vuelta es
La posición del centro de masas en función del tiempo es
Restamos las dos ecuaciones del movimiento y obtenemos la ecuación del movimiento relativo de las dos partículas
Expresamos la velocidad relativa y la aceleración relativa , en coordenadas polares (al final de esta página). Teniendo en cuenta los productos de los vectores unitarios , obtenemos un sistema de dos ecuaciones diferenciales
Estudiamos la segunda ecuación diferencial
Obtenemos una constante del movimiento que denominamos Lω y que se determina a partir de las condiciones iniciales, de r y dθ/dt en el instante t=0
Estudiamos la primera ecuación diferencial, en la dirección radial, en la que se sustituye dθ/dt por las constantes Lω y ω
Resolvemos el sistema de dos ecuaciones diferenciales con las siguientes condiciones iniciales: t=0, r=r0, θ=0, dr/dt=0, dθ/dt=0.
Para estas condiciones iniciales, la primera ecuación diferencial se escribe
Escalas
Definimos las variables adimensionales
Siendo P el periodo o tiempo que tarda una carga en dar una vuelta cuando describe una trayectoria circular en un campo magnético uniforme.
Para describir el movimiento relativo de las dos partículas se resuelve el sistema de dos ecuaciones diferenciales, con las condiciones iniciales, τ=0, x=1, dx/dτ=0, θ=0, dθ/dt=0.
Trayectoria
Si integramos la segunda ecuación diferencial, en la dirección radial
La velocidad radial se anula u=0, para x=1 y para otro valor máximo de x, solución de la ecuación cúbica
(x+1)2(x-1)-8cx=0
x3+x2-(1+8c)x-1=0
Denominamos xmáx a la raíz real positiva de esta ecuación.
>> c=1/8;
>> roots([1,1,-(1+8*c),-1]);
ans =
-1.8019
1.2470
-0.4450
La separación entre las dos partículas oscila entre un máximo de 1.247 y un mínimo de 1.
Como se ha hecho en dinámica celeste, para determinar la ecuación de la trayectoria despejamos dθ/dx e integramos
Cuando el límite superior de la integral es xmáx, (raíz positiva de la ecuación cúbica), obtenemos el ángulo θmáx.
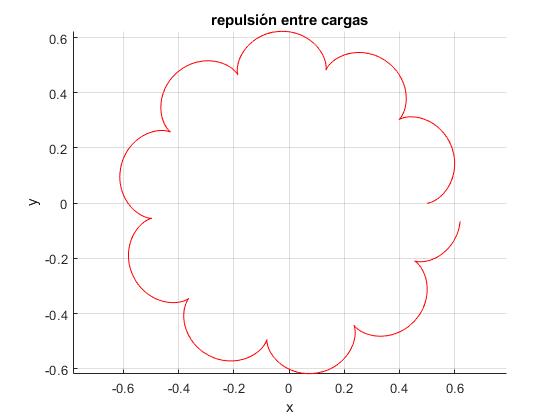
La ecuación implícita solamente calcula la parte de trayectoria comprendida entr 0 y θmáx, el resto de la trayectoria como se muestra en la figura se traza de la siguiente manera:
La recta que pasa por el origen y forma un ángulo θmáx es un eje de simetría. El punto Q es simétrico de P. Si las coordenadas de P son (x, θ) las coordenadas de Q son (x, 2θmáx-θ)
La recta que pasa por el origen y forma un ángulo 2θmáx es un eje de simetría. Si las coordendas de un punto son (x, θ) las coordenadas de su simétrico serán (x, 4θmáx-θ) y así, sucesivamente
Elaboramos el siguiente script para dibujar la trayectoria
c=1/8; %parámetro
%calcula la raíz real positiva
ra=roots([1,1,-(1+8*c),-1]);
for i=1:3
if ra(i)>0
break;
end
end
s_m=ra(i);
f=@(x) (x+1).*sqrt((x-1)./(8*c*x-((x+1).^2).*(x-1)))./x;
fi_m=integral(f,1,s_m);
%trayectoria implícita
ss=linspace(1,s_m,100);
fi=zeros(1,length(ss));
i=1;
for s=ss
fi(i)=integral(f,1,s);
i=i+1;
end
hold on
plot(ss.*cos(fi)/2,ss.*sin(fi)/2,'r')
N=round(2*pi/fi_m);
for n=2:2:N %simetría
plot(ss.*cos(n*fi_m-fi)/2,ss.*sin(n*fi_m-fi)/2,'r')
plot(ss.*cos(n*fi_m+fi)/2,ss.*sin(n*fi_m+fi)/2,'r')
end
hold off
grid on
axis equal
xlabel('x')
ylabel('y')
title('repulsión entre cargas')
Energía
La fuerza magnética es perpendicular a la velocidad de la partícula cargada por lo que no realiza trabajo. La energía en el S.R. del centro de masa es
Donde m/2 es la masa reducida
En términos de las variables adimensionales x y τ
La energía ε se mantiene constante en el S. R. del centro de masas e igual a la energía inicial, cuando τ=0, x=1, dx/dτ=0, ε=2c
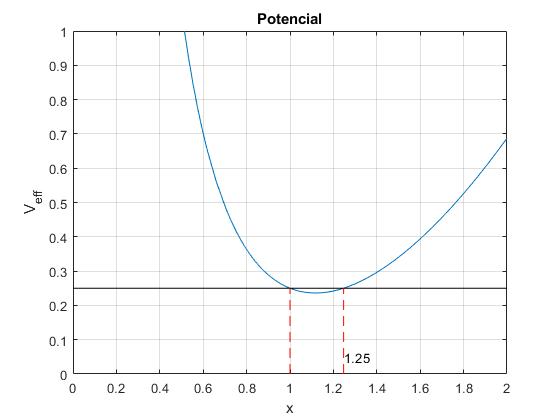
Representamos el potencial efectivo Veff(x) y la energía constante ε=2c
Calculamos la distancia máxima, (la mínima es (x=1), entre las dos partículas, cuando ε=Veff(x)
c=1/8; %parámetro
E=2*c; %energía inicial
f=@(x) 2*c./x+(x.^2).*(1./x.^2-1).^2/4;
fplot(f,[0.1,2])
line([0,2],[E,E],'color','k')
raices= roots([1,1,-(1+8*c),-1]);
x1=1;
for i=1:length(raices)
if raices(i)>0
x2=raices(i);
end
end
line([x1,x1],[0,f(x1)],'lineStyle','--','color','r')
line([x2,x2],[0,f(x2)],'lineStyle','--','color','r')
%text(x1,0.05,sprintf('%1.2f',x1))
text(x2,0.05,sprintf('%1.2f',x2))
grid on
ylim([0,1])
xlabel('x')
ylabel('V_{eff}')
title('Potencial')
Movimiento respecto del S.R. inercial
Conocido el movimiento relativo de las dos partículas y el movimiento del centro de masas, determinamos el movimiento de cada una de las dos partículas
El caso más sencillo, el centro de masas está en reposo en el origen R0=0. Se representan las trayectorias de las dos partículas para c=1/8. Comprobamos la separación máxima y mínima entre las dos partículas
c=1/8; %parámetro
rR=0; %cociente R0/r0
%x(1) es x, x(2) es dx/dtau y x(3) es th
f=@(t,x) [x(2); pi^2*(1/x(1)^3-x(1)+4*c/x(1)^2);pi*(1/x(1)^2-1);];
[t,x]=ode45(f,[0,10],[1,0,0]);
hold on
x1=rR*cos(2*pi*t)+x(:,1).*cos(x(:,3))/2; %rR*cos(2*pi*t)+
y1=-rR*sin(2*pi*t)+x(:,1).*sin(x(:,3))/2; %-rR*sin(2*pi*t)
plot(x1,y1)
x2=rR*cos(2*pi*t)-x(:,1).*cos(x(:,3))/2; %rR*cos(2*pi*t)+
y2=-rR*sin(2*pi*t)-x(:,1).*sin(x(:,3))/2; %-rR*sin(2*pi*t)
plot(x2,y2)
hold off
grid on
axis equal
xlabel('x')
ylabel('y')
title('Trayectoria')
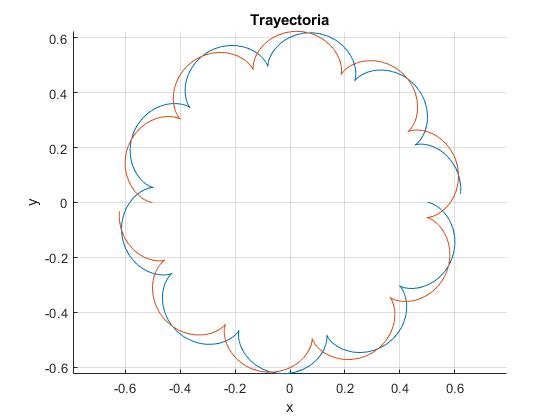
La separación máxima y mínima entre las dos partículas es
>> d=sqrt((x1-x2).^2+(y1-y2).^2); >> max(d) ans = 1.2474 >> min(d) ans = 0.9996
Comprobamos el principio de conservación de la energía en el S. R. del centro de masa
>> Eini=2*c;
>> Efin=(x(:,2).^2/pi^2+(x(:,1).^2).*(1./x(:,1).^2-1).^2)/4+2*c./x(:,1);
>> Eini,Efin
Eini = 0.2500
Efin =
0.2500
0.2500
0.2500
...
Cambiamos el valor del parámetro c para dibujar otras trayectorias, por ejemplo para c=10/8
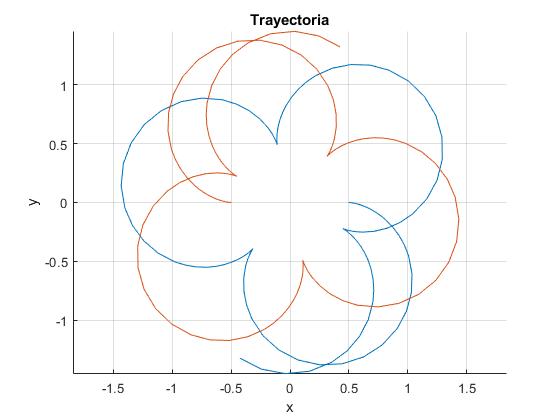
La separación máxima y mínima entre las dos partículas es
>> d=sqrt((x1-x2).^2+(y1-y2).^2);
>> max(d)
ans = 2.9066
>> min(d)
ans = 1
>> roots([1,1,-(1+8*c),-1]) %raíz positiva
ans =
-3.8148
2.9050
-0.0902
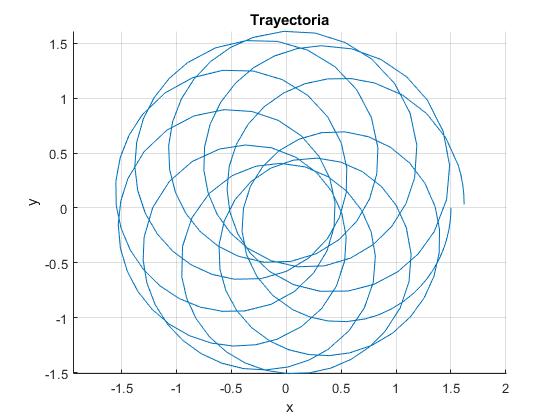
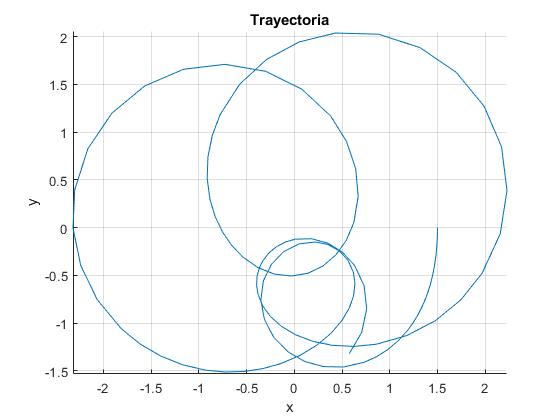
Supongamos ahora que, el centro de masas describe una trayectoria circular de radio R0/r0=1. Dibujamos la trayectoria de una partícula
c=1/8; %parámetro
rR=1; %cociente R0/r0
%x(1) es x, x(2) es dx/dtau y x(3) es th
f=@(t,x) [x(2); pi^2*(1/x(1)^3-x(1)+4*c/x(1)^2);pi*(1/x(1)^2-1);];
[t,x]=ode45(f,[0,10],[1,0,0]);
x1=rR*cos(2*pi*t)+x(:,1).*cos(x(:,3))/2; %rR*cos(2*pi*t)+
y1=-rR*sin(2*pi*t)+x(:,1).*sin(x(:,3))/2; %-rR*sin(2*pi*t)
plot(x1,y1)
grid on
axis equal
xlabel('x')
ylabel('y')
title('Trayectoria')
Cambiamos el valor del parámetro c para dibujar otras trayectorias, por ejemplo para c=10/8
Un problema interesante, sería encontrar las condiciones para que las trayectorias sean cerradas y que se repitan cada cierto periodo de tiempo
Coordenadas polares
La posición de una partícula es (x, y) en coordenadas rectangulares y (r, θ) en coordenadas polares. La relación es
x=r·cosθ, y=r·sinθ
Expresamos la velocidad de la partícula en coordenadas polares
Calculamos las componentes rectangulares de los vectores unitarios y
vemos que
Las expresión del vector velocidad en coordenadas polares es
Las expresión del vector aceleración es:
Referencias
Carl E Mungan Orbits of two electrons released from rest in a uniform transverse magnetic field. Eur. J. Phys. 39 (2018) 025204
Este artículo está disponible en la dirección: https://www.usna.edu/Users/physics/mungan/Publications/Publications.php#fndtn-panel120162017
O. L. de Lange, J. Pierrus. Solved Problems in Classical Mechanics. Analytical and numerical solutions with comments. Questions 10.16, 10.17, pp. 314-316