

Flotación de una barra de sección cuadrada
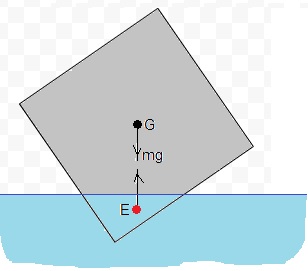
Cuando un cuerpo flota en equilibrio el peso y la fuerza de empuje tienen el mismo valor, la misma dirección pero sentidos contrarios. El punto de aplicación de la primera es el centro de masa G y de la segunda el centro de empuje E.
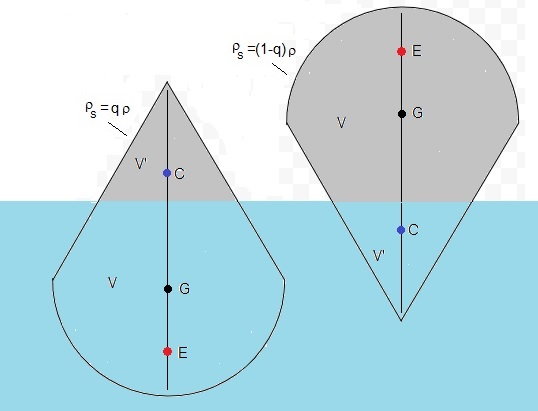
Sea G la posición del centro de masas del cuerpo y E el centro de masas de la parte sumergida (centro de empuje) y C el centro de masas de la parte expuesta al aire. El punto G está en la línea que une E y C. Sea V el volumen de la parte sumergida y V' de la parte no sumergida. El principio de Arquímedes, peso=empuje se expresa
ρs(V+V')=ρV. ρs es la densidad del cuerpo y ρ la densidad del agua, el cociente es la densidad relativa q=ρs/ρ
q(V+V')=V. Esta ecuación la escribimos de la forma
qV'=(1-q)V
Intercambiando q por (1-q) equivale a intercambiar V por V'
Para la configuración de equilibrio q hay otra configuración imagen 1-q tal como se muestra en la figura
Dos esquinas sumergidas
En la figura, se muestra una posible configuración de la sección cuadrada de la barra de lado unidad, con dos de sus esquinas sumergidas
Giramos la figura un ángulo θ y establecemos un sistema de referencia tal como se aprecia en la figura
Las coordenadas de las cuatro esquinas ABCD del cuadrado son A(-1/2,1), B(1/2,1), C(-1/2,0), D(1/2,0).
El centro de masa de la sección de la barra se encuentra en el punto G(0,1/2).
El área del trapecio MNCD es la misma que el área del rectángulo M'N'CD. Como el lado CD=1, la altura del rectángulo es q, la densidad relativa
Llamamos δ=tanθ/2 a la distancia MM' o NN'
Para que las dos esquinas estén sumergidas δ<q. La solución simétrica con δ<0 es tambien posible
Las coordenadas del punto Q(0,q), las de M(-1/2,q+δ), N(1/2,q-δ).
Calculamos las coordenadas del centro de empuje E. Primero, calculamos el centro de masa de una placa triangular de lados a y b
Para integrar precisamos de la relación entre x e y, y=-bx/a+b.
El centro de masas del trapecio CMDN, es la suma de un rectángulo de área (q-δ) y centro de masas (0, (q-δ)/2) y de un triángulo rectángulo de área δ y centro de masas (-1/6, (q-δ)+2δ/3)=(-1/6,q-δ/3)
El centro de masas del trapecio o las coordenadas del centro de empuje E son
Equilibrio
La recta que pasa por el centro de masa G y por el centro de empuje E es perpendicular a la superficie del agua, es decir a la recta MN. En términos de vectores el producto escalar
El miembro de la derecha es positivo para q>q1, donde q1 es la raíz de le ecuación de segundo grado 3q-3q2-1/2=0
Solamente estudiamos las configuraciones de equilibrio para q<0.5, la única raíz posible es q1=0.2113
Tenemos las primeras configuraciones, δ=0, para q<q1 y
para q>q1. Por otra parte, δ<q y esto sucede para q<0.25
hold on
f=@(x) 3*x-3*x.^2-1/2;
fplot(f, [0,0.5])
q1=(3-sqrt(3))/6;
line([q1,q1],[0,-0.5],'lineStyle','--','color','k')
line([0.25,0.25],[-0.5,sqrt(f(0.25))],'lineStyle','--','color','k')
fplot(@(x) sqrt(f(x)),[q1,0.5])
fplot(@(x) x,[q1,0.5])
hold off
xlabel('q')
ylabel('f(q)')
grid on
title('Función')
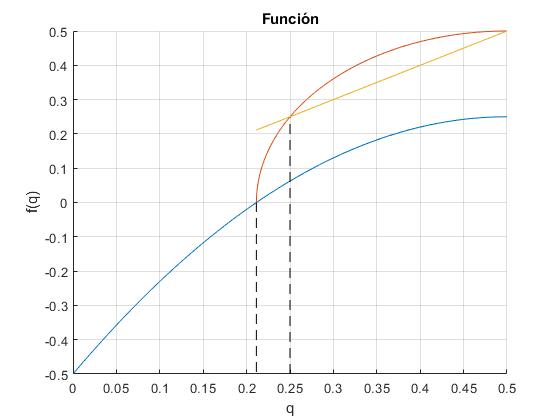
En color azul, se representa la función f(q)=3q-3q2-1/2, que es positiva para q>q1=0.2113. La curva de color rojo representa δ (la raiz cuadrada de f(q)) en función de q. La recta de color amarillo es δ=q. Como apreciamos, δ<q hasta q=0.25
Resumiendo. Las posibles valores para δ y por tanto, de θ son
En el intervalo q1<q<0.25 hay dos posibles soluciones, que distinguiremos utilizando el criterio de estabilidad.
Establidad
El criterio de estabilidad es que la distancia EG entre el centro de masa G y el centro de empuje E deberá ser mínima.
Antes hemos calculado el vector , el cuadrado de su módulo es
La derivada de d2 respecto del ángulo θ o respecto de δ=tanθ/2 es
Que es el mismo resultado que hemos obtenido anteriormente. Calculamos la derivada segunda
Signos de la derivada segunda
Representamos la derivada segunda en función de q para valores δ
δ=0, en color azul
, en color rosado
hold on
q=linspace(0,0.5,100);
delta=0;
y=2*(1-6*q+6*q.^2+6*delta^2)./(6*q).^2;
plot(q,y)
delta=sqrt(3*q-3*q.^2-1/2);
y=2*(1-6*q+6*q.^2+6*delta.^2)./(6*q).^2;
plot(q,y)
q1=(3-sqrt(3))/6;
line([q1,q1],[-5,5],'lineStyle','--','color','k')
line([0.25,0.25],[-5,5],'lineStyle','--','color','k')
hold off
xlabel('q')
ylim([-5,5])
legend('\delta=0','\delta!=0', 'location', 'best')
ylabel('f''(q)')
grid on
title('Estabilidad')
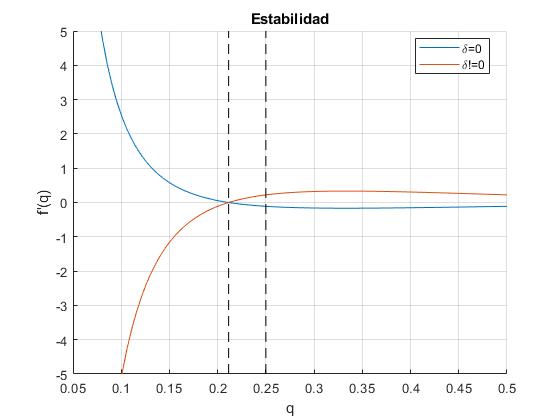
La derivada segunda es positiva (mínimo), equilibrio estable
En el intervalo, 0.25<q<0.5, la solución δ=0, es inestable, la derivada segunda es negativa
Para q=0.25, δ=0.25, y tanθ=1/2
Una esquina sumergida
En la figura, se muestra una posible configuración de la sección cuadrada de la barra de lado unidad, con una de sus esquinas sumergida
Giramos la figura un ángulo θ y establecemos un sistema de referencia tal como se aprecia en la figura
El área del triángulo rectángulo MNC es ab/2=q, por otra parte, tanθ=b/a. Despejamos a y b
Las coordenadas del centro de empuje E son (-1/2+a/3, b/3). Las coordenadas del centro de masa G son (0,1/2).
Equilibrio
La línea que pasa por el centro de masa G y el centro de empuje E es perpendicular a superficie del agua MN. El producto escalar
Los posibles ángulos θ de equilibrio son
Simplificamos la segunda expresión
El miembro derecho tiene que ser menor que la unidad 16q/(9-16q)<1, lo que implica que q<9/32
Para q=0.25, se despeja tanθ de la ecuación de segundo grado, obtenemos tanθ=1/2, que coincide con la sección anterior
Establidad
El criterio de estabilidad es que la distancia EG entre el centro de masa G y el centro de empuje E deberá ser mínima.
Antes hemos calculado el vector , el cuadrado de su módulo es
Denominamos t=tanθ. La derivada de d2 respecto del ángulo t es
El mismo resultado que en el apartado anterior. Calculamos la derivada segunda
Signos de la derivada segunda
Representamos la derivada segunda en función de q para valores de t=tanθ
t=1, en color azul, en el intervalo (0.25,0.5)
, en color azul, en el intervalo (0.25,9/32) donde el miembro derecho es menor que la unidad
q=linspace(1/4,0.5,100);
t=1;
y=4*q./(9*t.^3)-sqrt(2*q).*(3*t.^(-5/2)-t.^(-3/2))/12;
hold on
plot(q,y)
q=linspace(0.25, 9/32,100);
th=asin(16*q./(9-16*q));
t=tan(th/2);
y=4*q./(9*t.^3)-sqrt(2*q).*(3*t.^(-5/2)-t.^(-3/2))/12;
plot(q,y)
line([9/32,9/32],[-0.01,0.06],'lineStyle','--','color','k')
hold off
xlabel('q')
legend('t=1','t','location','best')
ylabel('f''(q)')
grid on
title('Estabilidad')
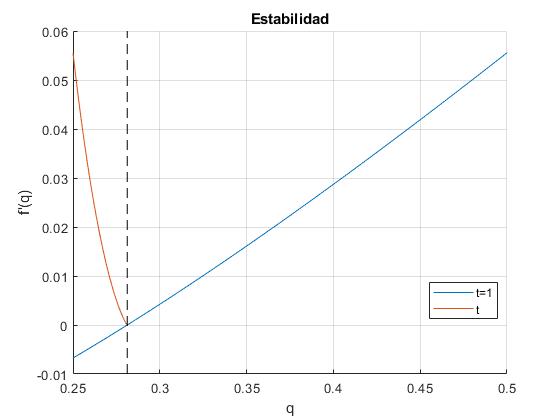
La derivada segunda es positiva, (mínimo) equilibrio estable para , en el intervalo (0.25,9/32)
Para tanθ=1, la derivada segunda es positiva si
Equilibrio y estabilidad
| Región | Intervalo | ángulo θ | Imagen |
|---|---|---|---|
| 1 | 0 | ||
| 2 | |||
| 3 | (1/4, 9/32=0.28125) | (1-9/32=0.71875, 3/4) | |
| 4 | (9/32, 1/2) | θ=45° | (1/2, 1-9/32) |
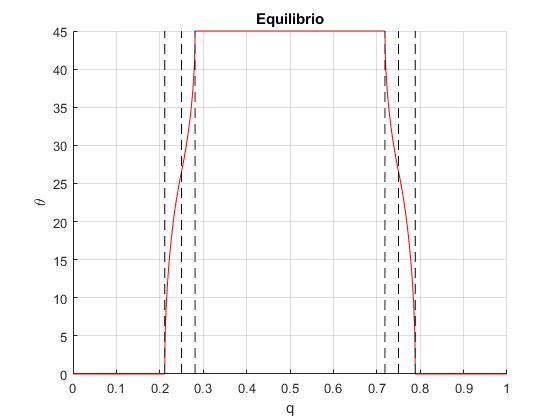
Representamos gráficamente el ángulo θ en grados en función de q en el intervalo (0, 1/2). Teniendo en cuenta la dualidad q→(1-q) extendemos la representación gráfica al intervalo (1/2, 1)
hold on
line([0,(3-sqrt(3))/6],[0,0],'color','r')
q=linspace((3-sqrt(3))/6,1/4,50);
th=atand(2*sqrt(3*q-3*q.^2-1/2));
plot(q,th,'r')
q=linspace(1/4,9/32,50);
th=asind(16*q./(9-16*q))/2;
plot(q,th,'r')
line([9/32,1/2],[45,45],'color','r')
line([1-9/32,1/2],[45,45],'color','r')
q=linspace(1/4,9/32,50);
th=asind(16*q./(9-16*q))/2;
plot(1-q,th,'r')
q=linspace((3-sqrt(3))/6,1/4,50);
th=atand(2*sqrt(3*q-3*q.^2-1/2));
plot(1-q,th,'r')
line([1,1-(3-sqrt(3))/6],[0,0],'color','r')
line([(3-sqrt(3))/6,(3-sqrt(3))/6],[0,45],'lineStyle','--','color','k')
line([1/4,1/4],[0,45],'lineStyle','--','color','k')
line([9/32,9/32],[0,45],'lineStyle','--','color','k')
line([1-(3-sqrt(3))/6,1-(3-sqrt(3))/6],[0,45],'lineStyle','--','color','k')
line([3/4,3/4],[0,45],'lineStyle','--','color','k')
line([1-9/32,1-9/32],[0,45],'lineStyle','--','color','k')
hold off
grid on
xlabel('q')
ylabel('\theta')
title('Equilibrio')
Ejemplos
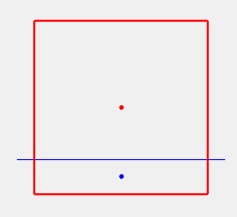
Representamos la sección de la barra que flota para un valor de la densidad relativa q en cada uno de los intervalos de la tabla q≤1/2
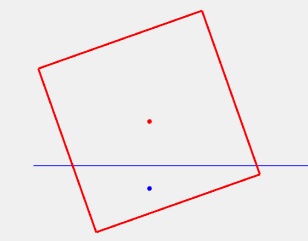
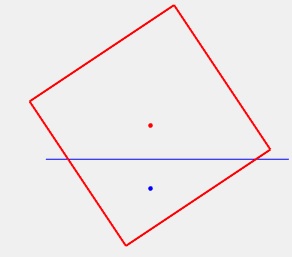
En los ejemplos 2, 3 y 4, se calcula el punto Q de intersección de la recta que une el centro de empuje E y el centro de masa G con la superficie horizontal, recta MN. Se gira la figura un ángulo θ alrededor de un eje perpendicular a la sección cuadrada y que pasa por Q.
Región 1, q=0.2
q=0.2; hold on line([-0.6,0.6],[0,0],'color','b') line([-0.5,0.5],[-q,-q],'lineWidth',1.5,'color','r') line([-0.5,0.5],[1-q,1-q],'lineWidth',1.5,'color','r') line([-0.5,-0.5],[-q,1-q],'lineWidth',1.5,'color','r') line([0.5,0.5],[-q,1-q],'lineWidth',1.5,'color','r') plot(0,1/2-q,'o','markersize',3,'markeredgecolor','r','markerfacecolor','r') plot(0,-q/2,'o','markersize',3,'markeredgecolor','b','markerfacecolor','b') hold off xlim([-1.25,1.25]) axis off axis equal
Región 2, q=0.23
function flota_5
q=0.23;
delta=sqrt(3*q-3*q^2-1/2);
th=atan(2*delta); %ángulo girado
m1=-2*delta;
b1=q;
m2=-(3*q^2+delta^2-3*q)/delta;
b2=-1/2;
x0=(b1-b2)/(m2-m1);
y0=(m2*b1-m1*b2)/(m2-m1);
hold on
line([-1,0.6],[0,0],'color','b')
[x1,y1]=gira(-0.5,0);
[x2,y2]=gira(0.5,0);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
[x1,y1]=gira(0.5,1);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
[x2,y2]=gira(-0.5,1);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
[x1,y1]=gira(-0.5,0);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
%centro de masa
[x1,y1]=gira(0,1/2);
plot(x1,y1,'o','markersize',3,'markeredgecolor','r','markerfacecolor','r')
%centro empuje
[x1,y1]=gira(-delta/(6*q),(3*q^2+delta^2)/(6*q));
plot(x1,y1,'o','markersize',3,'markeredgecolor','b','markerfacecolor','b')
hold off
xlim([-1.25,1.25])
axis off
axis equal
function [X,Y]=gira(x,y)
X=(x-x0)*cos(th)-(y-y0)*sin(th);
Y=(x-x0)*sin(th)+(y-y0)*cos(th);
end
end
Región 3, q=0.27
function flota_6
q=0.27;
th=asin(16*q/(9-16*q))/2; %ángulo girado
a=sqrt(2*q/tan(th));
b=sqrt(2*q*tan(th));
m1=-b/a;
b1=b*(a-1/2)/a;
m2=(2*b-3)/(2*a-3);
b2=1/2;
x0=(b1-b2)/(m2-m1);
y0=(m2*b1-m1*b2)/(m2-m1);
hold on
line([-0.6,0.8],[0,0],'color','b')
[x1,y1]=gira(-0.5,0);
[x2,y2]=gira(0.5,0);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
[x1,y1]=gira(0.5,1);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
[x2,y2]=gira(-0.5,1);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
[x1,y1]=gira(-0.5,0);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
%centro de masa
[x1,y1]=gira(0,1/2);
plot(x1,y1,'o','markersize',3,'markeredgecolor','r','markerfacecolor','r')
%centro empuje
[x1,y1]=gira(a/3-1/2,b/3);
plot(x1,y1,'o','markersize',3,'markeredgecolor','b','markerfacecolor','b')
hold off
xlim([-1.25,1.25])
axis off
axis equal
function [X,Y]=gira(x,y)
X=(x-x0)*cos(th)-(y-y0)*sin(th);
Y=(x-x0)*sin(th)+(y-y0)*cos(th);
end
end
Región 4, q=0.40
function flota_7
q=0.4;
th=pi/4; %ángulo girado
a=sqrt(2*q/tan(th));
b=sqrt(2*q*tan(th));
m1=-b/a;
b1=b*(a-1/2);
m2=(2*b-3)/(2+a-3);
b2=1/2;
x0=(b1-b2)/(m2-m1);
y0=(m2*b1-m1*b2)/(m2-m1);
hold on
line([-0.8,0.8],[0,0],'color','b')
[x1,y1]=gira(-0.5,0);
[x2,y2]=gira(0.5,0);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
[x1,y1]=gira(0.5,1);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
[x2,y2]=gira(-0.5,1);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
[x1,y1]=gira(-0.5,0);
line([x1,x2],[y1,y2],'lineWidth',1.5,'color','r')
%centro de masa
[x1,y1]=gira(0,1/2);
plot(x1,y1,'o','markersize',3,'markeredgecolor','r','markerfacecolor','r')
%centro empuje
[x1,y1]=gira(a/3-1/2,b/3);
plot(x1,y1,'o','markersize',3,'markeredgecolor','b','markerfacecolor','b')
hold off
xlim([-1.25,1.25])
axis off
axis equal
function [X,Y]=gira(x,y)
X=(x-x0)*cos(th)-(y-y0)*sin(th);
Y=(x-x0)*sin(th)+(y-y0)*cos(th);
end
end
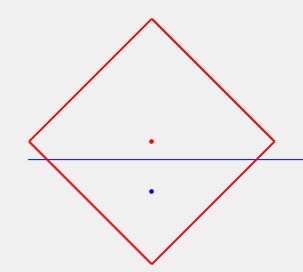
El código del ejemplo 3 y 4 son similares, en el primero hay que calcular el ángulo θ, en el segundo el ángulo θ=π/4 (45°).
Actividades
Se introduce
- La densidad relativa q en el intervalo (0, 1), en el control titulado Densidad relativa
Se pulsa el botón titulado Nuevo y se observa uno de los ocho posibles estados de equilibrio
Referencias
Yonatan Feigel, Nikita Fuzailov. Floating of a long square bar: experiment vs theory. Eur. J. Phys. 42 (2021) 035011