

Ecuación de la trayectoria
La energía y el momento angular en coordenadas polares
La posición del punto P es
x=r·cosθ
y=r·sinθ
Expresamos la velocidad de la partícula en coordenadas polares
Calculamos las componentes rectangulares de los vectores unitarios
vemos que
Las componentes del vector velocidad en coordenadas polares son, por tanto
La expresión de la energía en coordenadas polares es
Donde -GMm/r es la energía potencial correspondiente a la fuerza conservativa F=GMm/r2.
Expresamos el momento angular en coordenadas polares
Despejamos dθ /dt en la expresión del momento angular y la introducimos en la expresión de la energía. Tenemos dos ecuaciones
Movimiento en la dirección radial
Analizamos la primera ecuación de la energía. Decimos que la partícula se mueve en una región unidimensional r>0 bajo un potencial efectivo, cuyo aspecto se muestra en la figura
Se calculan los punto de retorno, la distancia de máximo acercamiento o alejamiento al centro de fuerzas, para una partícula de energía E, cuando la componente radial de la velocidad dr/dt=0
Representamos una función de la forma f(r)=a/r2-b/r con a=1 y b=5. Calculamos los puntos de intersección con la recta horizontal e=-2
a=1;
b=5;
e=-2;
f=@(r) a./r.^2-b./r;
fplot(f,[0.2,3],'color','r')
line([0,3],[e,e],'color','k')
%raíces
r1=(-b+sqrt(b^2+4*a*e))/(2*e);
r2=(-b-sqrt(b^2+4*a*e))/(2*e);
line([r1,r1],[0,e], 'lineStyle','--')
line([r2,r2],[0,e],'lineStyle','--')
grid on
xlabel('r')
ylabel('E_{ef}(r)')
title('Energía potencial')
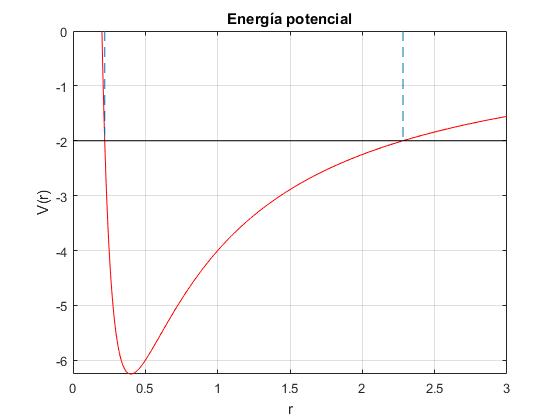
El mínimo se encuentra en la posición rm=2a/b
>> 2*a/b ans = 0.4000
La energía E de la partícula puede ser positiva o negativa. El valor de la energía total no puede ser menor que el mínimo de la energía potencial efectiva.
El valor mínimo de obtiene derivando Ep(r) respecto a r e igualando a cero
El cuerpo describe una trayectoria circular de radio rc con velocidad vc. El momento angular L=mrcvc.
La misma expresión, que la que se deduciría a partir de la dinámica del movimiento circular uniforme. La energía vale
Cuando la energía total E es mayor que el mínimo y menor que cero, como vemos en la gráfica, la recta horizontal que señala la energía total corta a curva que describe la energía potencial Ep(r), en dos puntos r1 y r2, soluciones de la ecuación de segundo grado
Llamando u=1/r
Donde ε es la excentricidad y d un factor de escala, que obtendremos más abajo al deducir la ecuación de la trayectoria.
- Si la energía E<0 ó ε<1 hay dos raices positivas. La partícula se mueve entre r1 y r2
- Si E>0 ó ε>1 solamente hay una raíz positiva, la partícula se mueve entre r1 e ∞
Fuerza central y conservativa
Utilizamos las propiedades de la fuerza de atracción: central y conservativa, para obtener la ecuación de la trayectoria
En la primera ecuación de la energía sustituímos dr/dt por
Despejamos dθ/dr para obtener la ecuación de la trayectoria
Para integrar se hace el cambio u=1/r
Tenemos una integral del tipo
Hacemos un nuevo cambio de variable
Donde C es una constante de integración que determinaremos más adelante. Deshacemos los cambios
Tomando C=-π/2, sin(θ-π/2)=-cos(θ).
Tomando el valor de la constante C=-π/2, establecemos el origen de ángulos, el ángulo θ=0, cuando la distancia de la partícula al centro de fuerzas es mínima
La ecuación de la trayectoria es una cónica (elipse, parábola o hipérbola) dependiendo del valor de la excentricidad ε.
| Clase de cónica | Descripción geométrica | Descripción física |
|---|---|---|
| Elipse | ε<1 | E<0 |
| Parábola | ε=1 | E=0 |
| Hipérbola | ε>1 | E>0 |
Las secciones cónicas (elipse, hipérbola y parábola) es el resultado de la intersección de una superficie cónica y un plano
Dibujamos las cónicas de excentricidades (0, 0.3,0.5,0.7,0.8,0.85) elipses, (1) parábola y (1.1,1.3,1.5,2.5) hipérbolas
hold on
for e=[0,0.3,0.5,0.7,0.8,0.85,0.9,1,1.1,1.3,1.5,2.5]
f=@(x) 1./(1+e*cos(x));
ang=pi;
if e>1 %hipérbolas
ang=acos(-1/e)-pi/180;
elseif e==1 %parábola
ang=5*pi/6;
end
fplot(@(x) f(x).*cos(x), @(x) f(x).*sin(x) ,[-ang,ang],
'displayName',num2str(e))
end
legend('-DynamicLegend','Location','northwest')
plot(0,0,'ko','markersize',3,'markeredgecolor','k','markerfacecolor','k')
hold off
axis equal
axis off
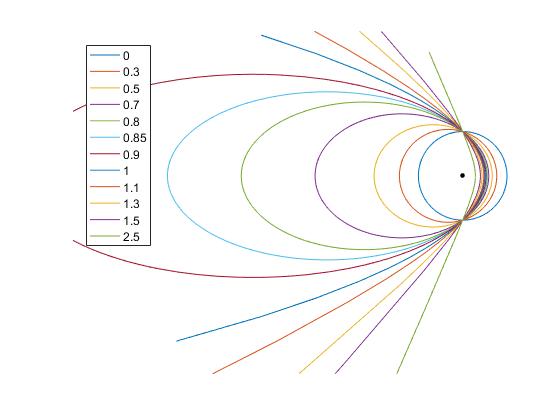
Para ver bien las trayectorias es necesario utilizar los botones Zoom In y Pan de la ventana gráfica
Ecuación del movimiento
En este apartado vamos a obtener la ecuación de la trayectoria aplicando la segunda ley de Newton.
Fuerzas atractivas
En el primer apartado hemos obtenido la expresión del vector velocidad en coordenadas polares. La expresión del vector aceleración es:
Sobre la partícula de masa m actúa una fuerza atractiva inversamente proporcional al cuadrado de la distancia r al centro de fuerzas. Las ecuaciones del movimiento son
La segunda ecuación nos indica que el momento angular L (expresado en coordenadas polares es constante)
Teniendo en cuenta la constancia del momento angular L, escribimos la primera ecuación de la forma
Para calcular la ecuación de la trayectoria r=r(θ), eliminamos el tiempo t del siguiente modo
Obtenemos una ecuación en términos de r y de sus derivadas respecto del ángulo θ
Hacemos el cambio de variable u=1/r
la ecuación del movimiento se convierte en
La solución de la ecuación diferencial es
En forma equivalente, escribiendo
Calculamos la constante ε a partir de la conservación de la energía.
Introduciendo la expresión de u y su derivada du/dθ, obtenemos
La ecuación de la trayectoria es r=1/u
Ejemplo
Un planeta parte de la posición (r=2/3, θ=0). Las componentes de la velocidad son dr/dt=0 y dθ/dt=9/4 en un sistema de unidades en el que GM=1
El momento angular es
La ecuación de la trayectoria
Los coeficientes A y B se determinan a partir de las condiciones iniciales: distancia al origen y velocidad en la dirección radial para θ=0
La ecuación de la trayectoria
r=@(x) 1./(cos(x)/2+1);
hold on
fplot(@(x) r(x).*cos(x), @(x) r(x).*sin(x), [0,2*pi])
plot(0,0,'ro','markersize',4,'markerfacecolor','r') %Sol
hold off
grid on
xlabel('x')
ylabel('y')
title('Trayectoria')
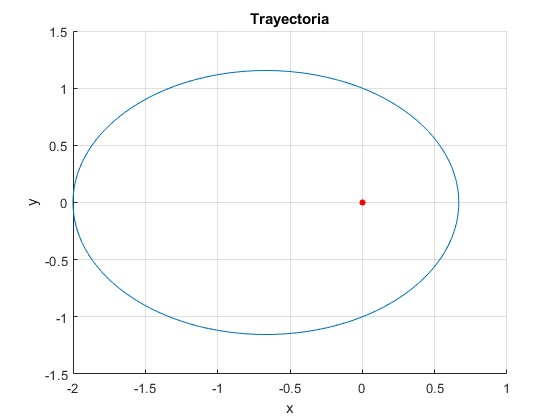
El punto de color rojo en el origen es el centro defuerzas, el Sol
Precesión
La trayectoria que siguen los planetas es elíptica, salvo la de Mercurio que tiene un movimiento de precesión que simulamos a continuación
A la ecuación diferencial del movimiento, se la añade una corrección relativista, inversamente proporcional al cuadrado de la distancia r al centro de fuerzas
Donde c es la velocidad de la luz
Resolvemos esta ecuación diferencial por procedimientos numéricos, tomando c=8, en el sistema de unidades elegido
function mercurio
c=8;
f=@(t,x) [x(2);-x(1)+1+3*x(1)^2/c^2];
opts=odeset('events',@opcion1_ode45);
[phi,u,pe,ue]=ode45(f,[0,10*pi],[3/2, 0],opts);
hold on
plot(cos(phi)./u(:,1), sin(phi)./u(:,1))
plot(cos(pe)./ue(:,1),sin(pe)./ue(:,1),'o','markersize',3,
'markerfacecolor','r')
disp(pe)
plot(0,0,'ro','markersize',4,'markerfacecolor','r') %Sol
hold off
grid on
axis equal
xlabel('x')
ylabel('y')
title('Órbita de Mercurio')
function [value,isterminal,direction]=opcion1_ode45(~,x)
value=x(2);
isterminal=0;
direction=1;
end
end
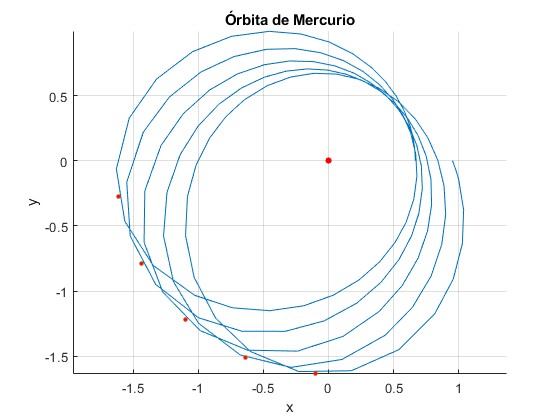
Mediante puntos de color rojo, señalamos las sucesivas posiciones del afelio, dr/dt=0
3.3092
9.9277
16.5460
23.1642
29.7822
Su avance es δθ=θi+1-θi-2π. Por ejemplo,
9.9277-3.3092-2π=0.3353
16.5460-9.9277-2π=0.3351
23.1642-16.5460-2π=0.3350
Fuerzas repulsivas
Sobre la partícula actúa una fuerza repulsiva inversamente proporcional al cuadrado de la distancia r al centro de fuerzas. Por ejemplo, un núcleo fijo de carga Q que repele a una partícula alfa de masa m y carga q. Las ecuaciones del movimiento son
Siguiendo los mismos pasos que para la fuerza atractiva, la solución es
De forma equivalente
Calculamos la constante ε a partir de la conservación de la energía.
Introduciendo la expresión de u y su derivada du/dθ, obtenemos
La ecuación de la trayectoria es r=1/u
Trayectorias circulares
La energía potencial efectiva para una partícula que se mueve bajo la acción de una fuerza atractiva inversamente proporcional al cuadrado de la distancia, F=-GMM/r2 es
El mínimo de esta función corresponde a trayectorias circulares estables de radio rc=L2/(GMm2)
Supongamos una fuerza cuyo potencial es V(r)=krn. Si la fuerza es atractiva k<0, repulsiva k>0. La energía potencial efectiva es
El extremo (máximo o mínimo) de esta función es
para que rc sea positivo, k>0 (repulsiva) y n>0, o k<0 (atractiva) y n<0
Calculamos la derivada segunda
Para que la trayectoria circular de radio rc sea estable
- Fuerza repulsiva, k>0 y n>0
- Fuerza atractiva, k<0 y -2<n<0
Para una fuerza atractiva k<0, con n=-1, tenemos trayectorias circulares estables
Referencias
W. G. Rees. Physics by Example. 200 problems and solutions. Cambridge University Press, (1994), Problem 41, pp.90-92
Hollis Williams. An elementary approach to simulating the perihelion of Mercury. Eur. J. Phys. 44 (2023) 065602