Oscilaciones amortiguadas por una fuerza de módulo constante
Plano inclinado
Consideremos un bloque de masa m unido a un muelle elástico de constante k que desliza a lo largo de un plano inclinado de ángulo θ. Sea μ el coeficiente de la fuerza de rozamiento entre el bloque y el plano inclinado.
Para describir el movimiento, estableceremos el eje X a lo largo del plano, situamos el origen O en la posición del extremo libre del muelle sin deformar, tomando el sentido positivo hacia arriba.
Las fuerzas sobre el bloque son:
-
El peso, mg
-
La reacción del plano inclinado, N=mgcosθ
-
La fuerza que ejerce el muelle deformado, kx
-
La fuerza de rozamiento, fr
El bloque desliza a lo largo del plano inclinado hacia abajo, v<0
El bloque parte de la posición x0>0 y desliza hacia abajo si la componente del peso mg·sinθ y la fuerza que ejerce el muelle kx0 es mayor que la fuerza de rozamiento máxima, μs·mg·cosθ,
mgsinθ+kx0≥μs·mg·cosθ
en caso contrario, permanecerá en reposo en la posición inicial. Supongamos que se cumple esta condición y el bloque desliza hacia abajo
Cuando el bloque se mueve hacia abajo (v<0), la fuerza de rozamiento es de sentido contrario a la velocidad del bloque y vale, fr=μk·N. La ecuación del movimiento es
ma=-kx-mgsinθ+μkmgcosθ
Escribimos la ecuación del movimiento en forma de ecuación diferencial
con ω2=k/m y a-= g(sinθ-μkcosθ)
Las ecuaciones del movimiento nos recuerdan la ecuación diferencial de un MAS, pero además tiene un término adicional.
La solución de la ecuación diferencial es la suma de la homogénea (la ecuación de un MAS) más una constante C. Introduciendo la solución particular (la constante C) en la ecuación diferencial
ω2C= -a-, C= -a- /ω2
La solución completa de la ecuación diferencial es
La velocidad del bloque es
Los coeficientes A y B se determinan a partir de las condiciones iniciales, en el instante t=0, el bloque parte de la posición x=x0 con velocidad inicial v=0.
x0=B-a- /ω2
0=Aω
La posición x y la velocidad v del bloque en su movimiento a lo largo del plano inclinado, hacia abajo, es
El máximo desplazamiento x1 se produce cuando la velocidad es nula v=0, en el instante t tal que ωt=π. La posición del bloque en este instante es
El móvil parte de x1 con velocidad inicial nula siempre que se cumpla que
k|x1|-mgsinθ≥ μsmgcosθ
en caso contrario, la posición x1 será la posición final del bloque en reposo. Supongamos que se cumple la primera condición.
El bloque desliza a lo largo del plano inclinado hacia arriba, v>0
Cuando el bloque se mueve hacia arriba (v>0), la fuerza de rozamiento cambia de sentido y la ecuación del movimiento es
ma=-kx –mgsinθ-μkmgcosθ
Escribimos la ecuación del movimiento en forma de ecuación diferencial
con ω2=k/m y a+= g(sinθ+μkcosθ)
La solución completa de la ecuación diferencial es
La velocidad del bloque es
Los coeficientes A y B se determinan a partir de las condiciones iniciales. Si ponemos el contador de tiempo parcial a cero, en el instante t=0, el bloque parte de la posición x=x1 con velocidad inicial v=0.
x1=B-a+ /ω2
0=Aω
La posición x y la velocidad v del bloque en su movimiento a lo largo del plano inclinado, hacia arriba, es
La velocidad del bloque es nula v=0, en el instante t tal que ωt=π, cuando la posición x2 del bloque es
El móvil parte de x2 con velocidad inicial nula siempre que se cumpla que
mgsinθ+kx2≥μs·mg·cosθ
en caso contrario, la posición x2 será la posición final del bloque en reposo. Supongamos que se cumple la primera condición.
Posiciones de retorno
El bloque desliza hacia abajo, después de un tiempo tal que ωt=π, la velocidad se hace cero en la posición
El móvil parte de x3 con velocidad inicial nula siempre que se cumpla que
k|x3|-mgsinθ≥ μsmgcosθ,
en caso contrario, la posición x3 será la posición final del bloque en reposo. Supongamos que se cumple la primera condición.
El bloque desliza hacia arriba, después de un tiempo tal que ωt=π, la velocidad se hace cero en la posición
En general, el móvil se encuentra en el instante t=(2n-1)π/ω con n=1, 2, 3..en la posición
El móvil parte de x2n-1 con velocidad inicial nula siempre que se cumpla que
k|x2n-1|-mgsinθ≥ μsmgcosθ,
en caso contrario, la posición x2n-1 será la posición final del bloque en reposo
El bloque se mueve hacia arriba v>0. La posición del bloque en función del tiempo es a partir del instante t=(2n-1)π/ω es
El bloque se encuentra en el instante t=(2n)π/ω con n=1, 2, 3..en la posición
El móvil parte de x2n en el instante t=(2n)π/ω con velocidad inicial nula siempre que se cumpla que
mgsinθ+kx2n≥μs·mg·cosθ
en caso contrario, la posición x2n será la posición final del bloque en reposo
El bloque se mueve hacia abajo v<0. La posición del bloque en función del tiempo es a partir del instante t=(2n)π/ω es
Distancia entre la posición de partida y el de llegada
La distancia entre la posición de partida x0 y la de llegada x2n, cuando el bloque se para definitivamente describiendo un número par (2n) de semioscilaciones es
Como el tiempo que tarda en describir una semioscilación es t=π/ω. El tiempo que tarda en pararse es t2n=(2n)π/ω. La distancia d entre el punto de partida y el de llegada es
Diseñamos una experiencia de laboratorio, en el que los resultados experimentales sean la medida de los tiempos t2n desde que se suelta el bloque en la posición x0 hasta que llega a la posición final x2n en reposo y la distancia d entre estas dos posiciones para un número par de semioscilaciones.
Como la distancia d es proporcional al coeficiente cinético μk. Aplicamos el procedimiento de regresión lineal para obtener la pendiente de la recta de ajuste y determinar así, el valor experimental de μk.
Ejemplo:
-
Ángulo del plano inclinado, θ=30º
-
Masa del bloque, m=1.0 kg
-
Constante elástica del muelle, k=50 N/m
-
Coeficiente de rozamiento en bloque y el plano inclinado, μk=μs=0.3
-
Posición inicial de partida, x0=0.5 m=50 cm
Las aceleraciones
a-= g(sinθ-μkcosθ)=2.35
m/s
a+= g(sinθ+μkcosθ)=7.45
m/s
Posiciones de retorno para las cuales la velocidad del bloque es cero
| x0=50 cm | x1= -59.4 |
| x2=29.6 | x3=-39.0 |
| x4=9.3 | x5=-18.7 |
| x6=-11.1 |
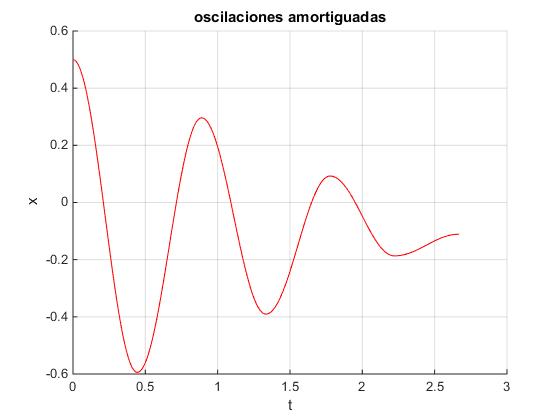
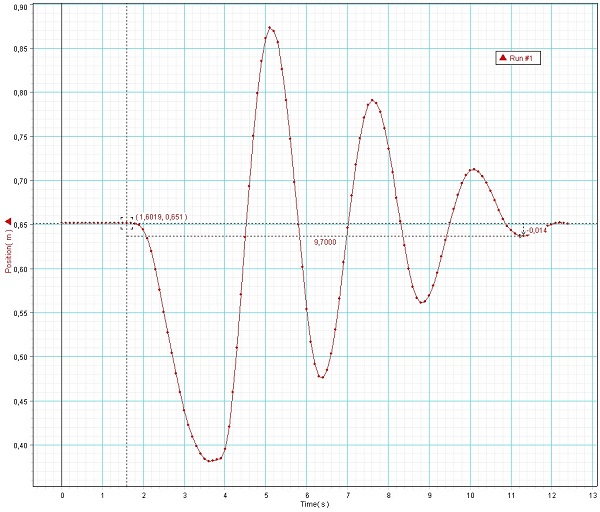
En la figura, se muestra la gráfica de la posición x del bloque en función del tiempo t, señalándose las posiciones de retorno, aquellas en las que la velocidad del bloque es nula.
El tiempo que tarda en describir una semioscilación es π/ω=0.44 s, el tiempo total que tarda en describir 6 semioscilaciones es t6= 2.67 s.
La distancia d entre la posición de partida y la posición final x6 del bloque en reposo es x6-x0=61.11 cm.
El siguiente script calcula las posiciones de retorno en metros. El bloque parte de la posición inicial x0=0.5 m
k=50; m=1; mu=0.3; g=9.8; angulo=pi/6; x0=0.5;
w=sqrt(k/m);
aMenos=g*(sin(angulo)-mu*cos(angulo));
aMas=g*(sin(angulo)+mu*cos(angulo));
n=1;
while(1)
xImpar=-x0+((-2*n)*aMenos+(2*n-2)*aMas)/w^2
if abs(xImpar)<aMas/w^2
break;
end
xPar=x0+(aMenos-aMas)*(2*n)/w^2
if xPar<-aMenos/w^2
break;
end
n=n+1;
end
xImpar =-0.5942 xPar = 0.2963 xImpar = -0.3905 xPar = 0.0926 xImpar = -0.1868 xPar = -0.1111
Mediante este script continuación del anterior, representamos la posición del bloque en función del tiempo hasta que se detiene
k=50; m=1; mu=0.3; g=9.8; angulo=pi/6; x0=0.5;
w=sqrt(k/m);
aMenos=g*(sin(angulo)-mu*cos(angulo));
aMas=g*(sin(angulo)+mu*cos(angulo));
n=1;
t=linspace(0,pi/w,50);
hold on
while(1)
x=(x0+((2*n-1)*aMenos-(2*n-2)*aMas)/w^2)*cos(w*t)-aMenos/w^2;
plot(t,x,'r');
xImpar=-x0+((-2*n)*aMenos+(2*n-2)*aMas)/w^2;
if abs(xImpar)<aMas/w^2
break;
end
t=t+pi/w;
x=-(-x0+((-2*n)*aMenos+(2*n-1)*aMas)/w^2)*cos(w*t)-aMas/w^2;
plot(t,x,'r');
xPar=x0+(aMenos-aMas)*(2*n)/w^2;
if xPar<-aMenos/w^2
break;
end
n=n+1;
t=t+pi/w;
end
hold off
grid on
xlabel('t')
ylabel('x')
title('oscilaciones amortiguadas')
Balance energético
El trabajo de la fuerza de rozamiento es igual a la diferencia entre la energía final y la energía inicial. La energía del sistema es la suma de
-
La energía cinética
-
La energía potencial elástica del muelle deformado
-
La energía potencial gravitatoria. Establecemos como nivel cero de energía potencial el origen
Si el bloque parte de la posición x0 con velocidad v=0. La velocidad que alcanza cuando se encuentra en la posición x se calcula a partir de la ecuación
El bloque se detiene en la posición x1
Resolvemos la ecuación de segundo grado y calculamos x1.
Si el bloque parte de la posición x1 con velocidad v=0. La velocidad que alcanza cuando se encuentra en la posición x se calcula a partir de la ecuación
El bloque se detiene en la posición x2
Resolvemos la ecuación de segundo grado y calculamos x2.
y así, sucesivamente
Actividades
Se introduce
-
El coeficiente de rozamiento μs=μk, entre el bloque y el plano sobre el cual desliza, en el control titulado μ.
-
El ángulo del plano inclinado en grados, en el control titulado Angulo.
-
La masa m del bloque se ha fijado en m=1.0 kg.
-
La posición inicial x0 del bloque en m, en el control titulado Posición.
-
La constante k del muelle elástico en N/m, en el control titulado k.
Se pulsa el botón titulado Nuevo
Se observa el movimiento del bloque deslizando sobre el plano inclinado.
En la parte inferior, se proporciona los datos relativos, al tiempo t en segundos, la posición x en cm y la velocidad v del bloque en m/s, y la energía del sistema formado por el bloque y el muelle, en cada instante.
Se dibujan mediante fechas las fuerzas sobre el bloque:
- Componente del peso a lo largo del plano inclinado
- Fuerza de rozamiento
- Fuerza que ejerce el muelle deformado
En la parte superior derecha, muestra en un diagrama de barras la energía del sistema en cada instante.
- El rectángulo de color negro, es la energía inicial
- En color rojo, la energía potencial elástica del muelle deformado, que es siempre positiva
- En color azul, la energía cinética del bloque
- El color rosa, la energía potencial, que puede ser positiva o negativa, dependiendo de que el cuerpo esté por encima o por debajo del origen.
La energía va disminuyendo debido al trabajo de la fuerza de rozamiento
Referencias
Barrat C., Strobel G. L. Sliding friction and the harmonic oscillator. Am. J. Phys. 49 (5) May 1981, pp. 500-501
Experiencia de laboratorio
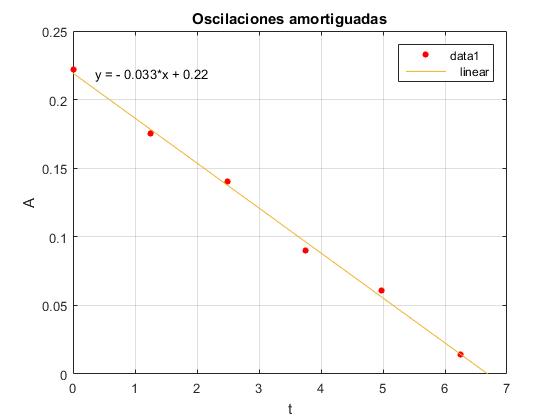
En una experiencia de laboratorio se han medido los desplazamientos máximos del bloque en función del tiempo
| t (s) | A |
|---|---|
| 0 | 0.222 |
| 1.25 | 0.175 |
| 2.49 | 0.140 |
| 3.75 | 0.09 |
| 4.98 | 0.061 |
| 6.25 | 0.014 |
Representamos los datos y hacemos un ajuste lineal.
%tiempo
x=[0,1.25,2.49,3.75,4.98,6.25];
%amplitud
y=[0.222,0.175,0.140,0.09,0.061,0.014];
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
grid on
xlabel('t')
ylabel('A')
title('Oscilaciones amortiguadas')
En la ventana gráfica de MATLAB elegimos Tools/Basic fitting, activamos la casilla linear y obtenemos para la pendiente de la recta que mejor ajusta a los datos experimentales p1=-0.032773.