

Una máquina de Atwood de masa variable que oscila
Estado inicial
La situación inicial, se muestra a la izquierda en la figura. El cuerpo de masa m2 está en el suelo y el cuerpo de masa m1 desplazado una altura h0<d. La cuerda que une que une los dos cuerpos de longitud d no tiene efecto alguno sobre su movimiento. El cuerpo de masa m2 continúa en reposo en el suelo. La energía inicial es potencial, referida al suelo es
E0=Mg(H-h0)+m1gh0.
Donde H es la altura del eje de la polea
Movimiento del cuerpo de masa m1
En la parte derecha de la figura, se ha dibujado las fuerzas sobre cada uno de los tres cuerpos que intervienen. Las ecuaciones del movimientos son
Donde I es el momento de inercia de la polea y α=a1/R la aceleración angular de la polea
Sumamos las tres ecuaciones y despejamos la aceleración a1
La posición y velocidad del cuerpo de masa m1
Conservación del momento angular
Cuando el cuerpo de masa m1 se ha desplazado hasta la altura d, su velocidad es
El tiempo que tarda el cuerpo de masa m1 en llegar a esta posición es
La energía del sistema no ha cambiado
La cuerda que une este cuerpo y el de masa m2 está tensa. Al cabo de un intervalo de tiempo que supondremos muy breve, los cuerpos alcanzan una velocidad común v1 que se obtiene aplicando el principio de conservación del momento angular
El momento angular inicial es
El momento angular final es
Despejamos la velocidad final v1
La energía del sistema cambia
La variación de energía es
Movimiento de los dos cuerpos
Los cuerpos de masas m1 y m2 se mueven hacia arriba, disminuyendo su velocidad ya que m1+m2>M, la aceleración es
Las ecuaciones del movimiento son:
Sumamos las tres ecuaciones y despejamos la aceleración a2
La aceleración a2 es de sentido contrario a la velocidad inicial v1, por lo que el cuerpo m1 alcanzará un desplazamiento máximo hasta que la velocidad se haga cero. Después se moverá hacia abajo hasta que el cuerpo de masa m2 choque con el suelo, la velocidad de los cuerpos será v1 pero de sentido contrario.
La posición y velocidad del cuerpo de masa m1
El tiempo que invierte en esta etapa es el que tarda en subir desde y=d y regresar a la misma posición
Choque del cuerpo de masa m2 con el suelo
El cuerpo de masa m2 lleva una velocidad v1 choca inelásticamente con el suelo, reduciendo su velocidad a cero en un intervalo de tiempo muy corto. La energía del sistema antes del choque es E1 y después del choque
El sistema pierde una energía
Final del primer periodo
El cuerpo de masa m2 no tiene efecto sobre el movimiento posterior de los otros cuerpos. El cuerpo de masa m1 se mueva hacia abajo con aceleración a1 de sentido contrario a la velocidad inicial v1, ya que m1<M
La posición y velocidad de dicho cuerpo
La velocidad del cuerpo de masa m1 se anula en la posición h1
El tiempo que invierte en esta etapa es
Movimiento completo
Alturas iniciales.
En general, tendremos que
La relación de recurrencia se convierte en
Periodo
El periodo de la primera oscilación es la suma de los tiempos de las tres etapas
Análogamente, obtendremos el periodo de la segunda, tercera, ... oscilación
Energía disipada
Se disipa energía en dos momentos:
- Cuando se pone en movimiento el cuerpo de masa m2 unido mediante una cuerda inextensibre de longitud d al cupero de masa m1
- Cuando el cuerpo de masa m2 choca inelásticamente con el suelo
La variación de energía durante el primer periodo
Análogamente, obtendremos la variación de energía de la segunda, tercera, ... oscilación
Ejemplo
Sea el sistema formado por
- Cuerpo de masa M=33.95 g
- Cuerpo de masa m1=28.95 g
- Cuerpo de masa m2=8.70 g
- Polea de momento de inercia I/R2=3 g
- Distancia entre los cuerpos, d=54.5 cm
- Altura inicial, h0=14 cm
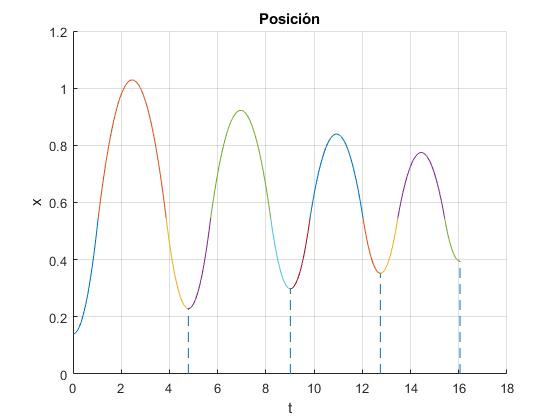
Representamos la posición y del cuerpo de masa m1 en función del tiempo t durante cuatro oscilaciones
M=33.95/1000; %contapeso
m1=28.95/1000;
m2=8.70/1000;
I=3/1000; %momento de inercia I/R^2
a1=(M-m1)*9.8/(M+m1+I);
a2=-(m1+m2-M)*9.8/(M+m1+m2+I);
gamma=(M+m1+I)/(M+m1+m2+I);
d=0.545; %distancia entre m1 y m2
h0=0.14; %altura inicial de m1
hold on
P=0;
for i=1:4
t1=sqrt(2*(d-h0)/a1)+P;
fplot(@(t) h0+a1*(t-P).^2/2,[P,t1])
v1=gamma*a1*(t1-P);
t2=-2*v1/a2+t1; %sube y baja de x=d
fplot(@(t) d+v1*(t-t1)+a2*(t-t1).^2/2,[t1,t2])
%sigue bajando sin m2 hasta que se detiene
t3=v1/a1+t2;
fplot(@(t) d-v1*(t-t2)+a1*(t-t2).^2/2,[t2,t3])
P=t3;
h0=d-gamma^2*(d-h0);
line([t3,t3],[0,h0],'lineStyle','--')
end
hold off
grid on
xlabel('t')
ylabel('x')
title('Posición')
Las líneas a trazos, señalan los periodos, que cuya duración va disminuyendo.
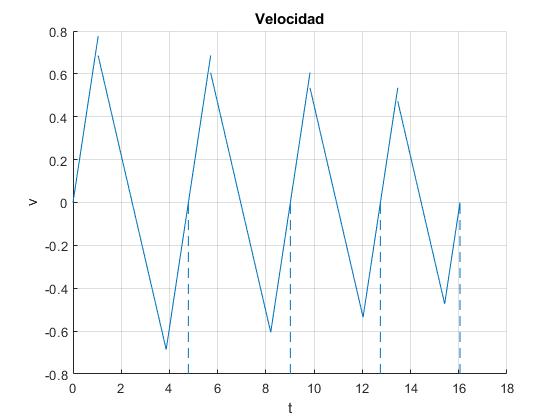
Representamos la velocidad v de los cuerpos en función del tiempo t durante cuatro oscilaciones
M=33.95/1000; %contapeso
m1=28.95/1000;
m2=8.70/1000;
I=3/1000; %momento de inercia I/R^2
a1=(M-m1)*9.8/(M+m1+I);
a2=-(m1+m2-M)*9.8/(M+m1+m2+I);
gamma=(M+m1+I)/(M+m1+m2+I);
d=0.545; %distancia entre m1 y m2
h0=0.14; %altura inicial de m1
hold on
P=0;
for i=1:4
t1=sqrt(2*(d-h0)/a1)+P;
line([P,t1],[0,a1*(t1-P)])
v1=gamma*a1*(t1-P);
t2=-2*v1/a2+t1; %sube y baja de x=d
line([t1,t2],[v1,v1+a2*(t2-t1)])
t3=v1/a1+t2;
line([t2,t3],[-v1, -v1+a1*(t3-t2)])
P=t3;
line([t3,t3],[-0.8,0],'lineStyle','--')
h0=d-gamma^2*(d-h0);
end
hold off
grid on
xlabel('t')
ylabel('v')
title('Velocidad')
La velocidad no es una función continua, en el instante t1, ya que pasa de v a v1 cuando la altura del cuerpo es y=d
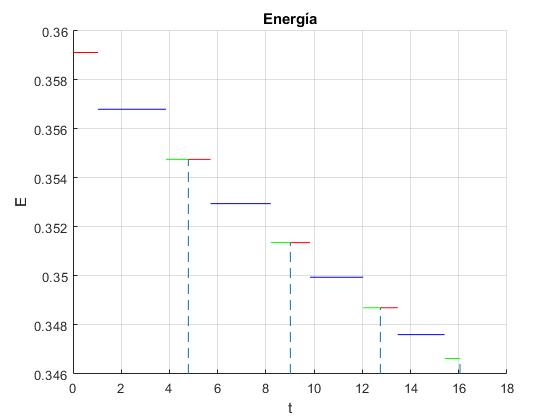
Representamos la energía E de los cuerpos en función del tiempo t durante cuatro oscilaciones
M=33.95/1000; %contapeso
m1=28.95/1000;
m2=8.70/1000;
I=3/1000; %momento de inercia I/R^2
a1=(M-m1)*9.8/(M+m1+I); %aceleraciones
a2=-(m1+m2-M)*9.8/(M+m1+m2+I);
gamma=(M+m1+I)/(M+m1+m2+I);
d=0.545; %distancia entre m1 y m2
h0=0.14; %altura inicial de m1
hold on
P=0;
E1=M*9.8*(1.1-h0)+m1*9.8*h0;
for i=1:4
t1=sqrt(2*(d-h0)/a1)+P;
line([P,t1],[E1,E1],'color','r')
v1=gamma*a1*(t1-P);
E2=M*9.8*(1.1-d)+m1*9.8*d+(M+m1+m2+I)*v1^2/2;
t2=-2*v1/a2+t1; %sube y baja de x=d
line([t1,t2],[E2,E2],'color','b')
t3=v1/a1+t2;
E3=M*9.8*(1.1-d)+m1*9.8*d+(M+m1+I)*v1^2/2;
line([t2,t3],[E3,E3],'color','g')
line([t3,t3],[0.346,E3],'lineStyle','--')
P=t3;
h0=d-gamma^2*(d-h0);
E1=M*9.8*(1.1-h0)+m1*9.8*h0;
end
hold off
grid on
xlabel('t')
ylabel('E')
title('Energía')
Actividades
Mediante este programa interactivo, se observa la animación del sistema descrito en el ejemplo anterior. En la parte derecha, se representa la altura y del cuerpo de masa m1 en función del tiempo t
En la parte superior derecha, se proporcionan los datos de
- Tiempo, t en s
- Altura y en cm
- Velocidad v en cm/s
- Aceleración a en m/s2
Referencias
B. Lucatto, M.B. Caprecci, J.V.A. Gonçalves, B.N. Sismanoglu. Máquina de Atwood com massa variável em movimento oscilatório atípico. Revista Brasileira de Ensino de Física, v. 36, n. 2, 2503 (2014)