

Oscilaciones amortiguadas combinación de una fuerza de rozamiento constante y otra proporcional a la velocidad
Cuando el bloque se encuentra en reposo, actúan dos fuerzas iguales y de sentido contrario sobre el mismo:
- La que ejerce el muelle, proporcional a su deformación kx, donde k es la constante elástica
- La fuerza de rozamiento Fr, que deberá ser inferior a su máximo valor μsmg. Donde μs es el coeficiente estático.
Cuando la fuerza que ejerce el muelle kx es mayor o igual que μsmg, el cuerpo empieza a deslizar sobre el plano horizontal. El bloque incrementa su velocidad, actuando la fuerza de rozamiento proporcional a la velocidad λv
Supongamos que el bloque parte de la posición x0, y se cumple que k|x0|>μsmg, vamos a estudiar el movimiento del bloque hasta que se detiene después de un tiempo
Primer periodo
Estudiamos por separado el movimiento hacia la izquierda y a continuación, si no se detiene, hacia la derecha
Movimiento hacia la izquierda
Cuando el bloque se mueve hacia la izquierda (v<0), la ecuación del movimiento es
ma=-kx+μmg+(-λv)
En forma de ecuación diferencial
μ es el coeficiente cinético, ω0 es la frecuencia natural o propia del oscilador, γ es el coeficiente de amortiguamiento
La solución particular de la ecuación diferencial es, x1=C, donde C es una constante a determinar introduciéndola en la ecuación diferencial
La solución de la homogénea es la deducida en la página titulada oscilaciones amortiguadas
La solución completa es x=x1+x2
ω se denomina frecuencia de la oscilación amortiguada, que difiere poco de la frecuencia natura ω0 si el amortiguamiento γ es pequeño
La velocidad del bloque es
Los coeficientes A y B se determinan a partir de las condiciones iniciales: el bloque parte de la posición x0 en el instante t=0, en reposo, v=0 si se cumple que k|x0|>μsmg, o bien
El resultado es
Para simplificar la notación denominaremos,
La posición del bloque desde el momento en que se suelta t=0, es
y su velocidad
Se detiene cuando v=0, o cuando ωt=π, en la posición
Para simplificar la notación denominaremos,
La posición final x1 se escribe con la notación establecida
Movimiento hacia la derecha
Si se cumple que el bloque se mueve hacia la derecha
Cuando el bloque se mueve hacia la derecha (v>0), la ecuación del movimiento es
ma=-kx-μmg-λv
En forma de ecuación diferencial
La solución completa para t>π/ω es
La velocidad del bloque cuando se mueve hacia la derecha es
Los coeficientes A y B se determinan a partir de las condiciones iniciales, el móvil parte de la posición x1 en el instante t=π/ω, en reposo, v=0, si se cumple que
El resultado es
La posición y velocidad en función del tiempo para t>π/ω es
El bloque se detiene v=0, en el instante t=2π/ω, en la posición x2
Segundo periodo
Movimiento hacia la izquierda
Si se cumple que el bloque se mueve hacia la izquierda
La posición del bloque para t>2π/ω es
Derivando obtenemos su velocidad
Los coeficientes A y B se determinan a partir de las condiciones iniciales, el móvil parte de la posición x2 en el instante t=2π/ω, en reposo, v=0, si se cumple que
El resultado es
La posición y velocidad del bloque en función del tiempo, para t>2π/ω es
El bloque se detiene v=0, en el instante t=3π/ω, en la posición x3
Movimiento hacia la derecha
Si se cumple que el bloque se mueve hacia la derecha
La posición del bloque para t>3π/ω es
Derivando, obtenemos su velocidad
Los coeficientes A y B se determinan a partir de las condiciones iniciales, el móvil parte de la posición x3 en el instante t=3π/ω, en reposo, v=0, si se cumple que
El resultado es
La posición y velocidad del bloque en función del tiempo, para t>3π/ω es
El bloque se detiene v=0, en el instante t=4π/ω, en la posición x4
Generalización
Sea x0, la posición de partida y P=2π/ω el periodo. Las posiciones del bloque en los instantes t=nP/2 en los que se encuentra en reposo v=0, son
Observamos que las potencias de β multiplicados por 2 forman una progresión geométrica, cuya suma es
La expresión del término gneral x(nP/2) es
Consideremos el siguiente oscilador
- Frecuencia propia rad/s
- Constante de amortiguamiento, γ=0.1 s-1
- Coeficiente cinético y estático μ=0.2
El script proporciona las posiciones en las que el bloque se encuentra en reposo v=0 en los instantes nP/2 o bien, nπ/ω
w0=sqrt(50); %frecuencia propia
gamma=0.1; %constante de amortiguamiento
w=sqrt(w0^2-gamma^2); %frecuencia de la oscilacón amortiguada
mu=0.2; %coeficiente estático y cinético
Dx=9.8*mu/w0^2;
beta=exp(-gamma*pi/w);
x0=0.7; %posición inicial
n=0;
while(1)
x=(-1)^n*(beta^n*x0-(1+beta)*(1-beta^n)*Dx/(1-beta));
if w0^2*abs(x)<mu*9.8
break
end
disp([n, n*pi/w,x])
n=n+1;
end
0 0 0.7000
1.0000 0.4443 -0.5929
2.0000 0.8887 0.4904
3.0000 1.3330 -0.3924
4.0000 1.7773 0.2987
5.0000 2.2217 -0.2090
6.0000 2.6660 0.1232
7.0000 3.1103 -0.0412
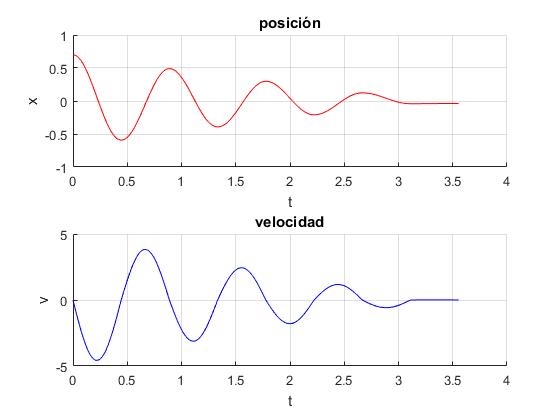
Las posiciones y velocidades en función del tiempo en los sucesivos semiperiodos son
Introduciendo la expresión de xn o x(nP/2) en el término general, obtenemos
hemos utilizado cos(nπ)=(-1)n y sin(nπ)=0
El script representa la posición x y velocidad x en función del tiempo t. Con la herramienta del menú de la ventana gráfica Data cursor podemos medir las posiciones en las que el bloque se encuentra en reposo v=0
w0=sqrt(50); %frecuencia propia
gamma=0.1; %constante de amortiguamiento
w=sqrt(w0^2-gamma^2); %frecuencia de la oscilación amortiguada
mu=0.2; %coeficiente estático y cinético
Dx=9.8*mu/w0^2;
beta=exp(-gamma*pi/w);
x0=0.7; %posición inicial
subplot(2,1,1)
n=0;
hold on
while(1)
x=@(t) (x0-Dx*(2*beta^(-n)-beta-1)/(1-beta))*exp(-gamma*t).*(gamma*sin(w*t)/w
+cos(w*t))+(-1)^n*Dx;
if w0^2*abs(x(n*pi/w))<mu*9.8
break
end
fplot(x,[n*pi/w,(n+1)*pi/w],'r')
n=n+1;
end
hold off
grid on
xlabel('t')
ylabel('x')
title('posición')
subplot(2,1,2)
n=0;
hold on
while(1)
x=@(t) (x0-Dx*(2*beta^(-n)-beta-1)/(1-beta))*exp(-gamma*t).*(gamma*sin(w*t)/w
+cos(w*t))+(-1)^n*Dx;
v=@(t) -w0^2*(x0-Dx*(2*beta^(-n)-beta-1)/(1-beta))*exp(-gamma*t).*sin(w*t)/w;
if w0^2*abs(x(n*pi/w))<mu*9.8
break
end
fplot(v,[n*pi/w,(n+1)*pi/w],'b')
n=n+1;
end
hold off
grid on
xlabel('t')
ylabel('v')
title('velocidad')
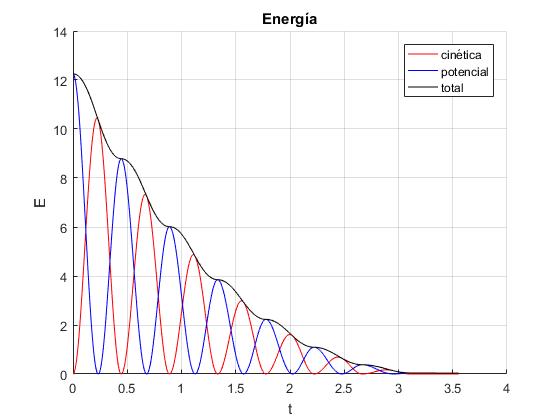
Representamos la energía cinética, Ek=v2/2, potencial y total
w0=sqrt(50); %frecuencia propia
gamma=0.1; %constante de amortiguamiento
w=sqrt(w0^2-gamma^2); %frecuencia de la oscilacón amortiguada
mu=0.2; %coeficiente estático y cinético
Dx=9.8*mu/w0^2;
beta=exp(-gamma*pi/w);
x0=0.7; %posición inicial
hold on
n=0;
while(1)
x=@(t) (x0-Dx*(2*beta^(-n)-beta-1)/(1-beta))*exp(-gamma*t).*(gamma*sin(w*t)/w
+cos(w*t))+(-1)^n*Dx;
v=@(t) -w0^2*(x0-Dx*(2*beta^(-n)-beta-1)/(1-beta))*exp(-gamma*t).*sin(w*t)/w;
if w0^2*abs(x(n*pi/w))<mu*9.8
break
end
Ek=@(t) v(t).^2/2;
Ep=@(t) w0^2*x(t).^2/2;
E=@(t) Ek(t)+Ep(t);
fplot(Ek,[n*pi/w,(n+1)*pi/w],'r')
fplot(Ep,[n*pi/w,(n+1)*pi/w],'b')
fplot(E,[n*pi/w,(n+1)*pi/w],'k')
n=n+1;
end
hold off
grid on
legend('cinética','potencial','total')
xlabel('t')
ylabel('E')
title('Energía')
Actividades
Se introduce
- El coeficiente de rozamiento μ en el control titulado Coef. rozamiento
- El coeficiente de amortiguamiento, γ, el control titulado Amortiguamiento
- La constante elástica k del muelle o cuadrado de la frecuencia angular ω0, en el control titulado Constante elástica.
- La posición inicial del bloque en el control titulado Posición inicial
- La masa del bloque se ha fijado en m=1.0 kg
Se pulsa el botón titulado Nuevo
Se observa el movimiento del bloque entre los puntos de retorno, hasta que se para.
Se representa la posición del bloque en función del tiempo.
- Una flecha de color rojo, representa la fuerza que ejerce el muelle
- Una flecha de color azul, representa la fuerza de rozamiento constante.
- Una flecha de color negro, representa la fuerza de rozamiento proporcional a la velocidad.
En la parte superior derecha, se proporcionan los datos de
- El tiempo
- La posición del bloque
- La velocidad del bloque
- La energía del bloque (cinética más potencial)
En la parte izquierda, se representa la energía del bloque en forma de diagrama de barras.
- En color rojo, la energía potencial elástica
- En color azul, la energía cinética
vemos como la energía total disminuye continuamente a causa del trabajo de las fuerzas de rozamiento.
Referencias
Peter F. Hinrichsen, Chris I. Larnder. Combined viscous and dry friction damping of oscillatory motion. Am. J. Phys. 86 (8) August 2018, pp 577-584