

Movimiento de un péndulo bajo la acción de una fuerza de rozamiento proporcional al cuadrado de la velocidad
Estudiamos ahora, el péndulo simple cuyo comportamiento difiere del oscilador consistente en una masa unida a un muelle elástico
Cuando un péndulo simple oscila en el aire, es una suposición razonable considerar que la fuerza de rozamiento que actúa sobre la partícula sea proporcional al cuadrado de la velocidad.
El péndulo describe una trayectoria circular, un arco de una circunferencia de radio l (la longitud del péndulo).
Las fuerzas que actúan sobre la partícula de masa m son:
- el peso mg
- La tensión T del hilo
- La fuerza de rozamiento λv2 de signo contrario a la velocidad v
Movimiento en la dirección radial
Movimiento en la dirección tangencial
La partícula describe una trayectoria circular de radio l
La tensión del hilo tiene que ser positiva T>0
mat=-mg·sinθ-λv2
La aceleración tangencial de la partícula es at=dv/dt.
La relación entre la aceleración tangencial at y la aceleración angular α es at=α·l=l·d2θ/dt2. La ecuación del movimiento se escribe en forma de ecuación diferencial
Solución numérica
Resolvemos la ecuación diferencial por procedimientos numéricos, con las siguientes condiciones iniciales: en el instante t=0, el móvil parte en reposo dθ/dt=0 desde θ=θ0
w0=100; %frecuencia angular rad/s
k=0.7; % gamma·l, constante de amortiguamiento
x0=pi/3; %ángulo inicial
f=@(t,x) [x(2);-k*x(2)^2*sign(x(2))-w0^2*sin(x(1))];
[t,x]=ode45(f,[0,1],[x0,0]);
plot(t, x(:,1))
grid on
xlabel('t')
ylabel('\theta');
title('Oscilador amortiguado')
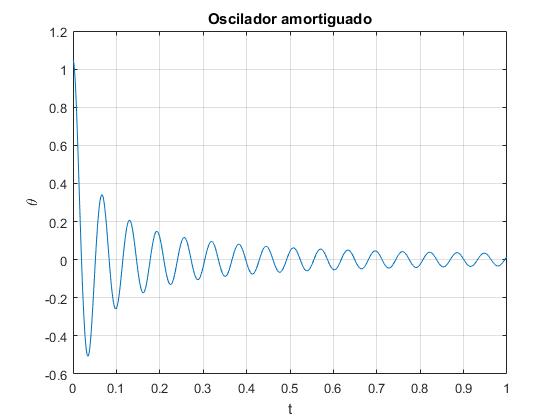
Un resultado similar al del oscilador lineal
La mayor riqueza de comportamientos se produce para la condición inicial siguiente: en la posición de partida θ0, la velocidad de la partícula es v0, que trataremos en el siguiente sección
Solución analítica
Transformamos la ecuación diferencial de segundo orden en θ y t en una de primer orden en v=l·dθ/dt y θ donde v es la velocidad de la partícula
Llamando z=v2, la solución particular es z1=Asinθ+Bcosθ que introducimos en la ecuación diferencial para calcular los coeficientes A y B
La solución de la homogénea es z2=C·exp(-2γlθ). La solución completa es v2=z1+z2
El coeficiente C se determina a partir de las condiciones iniciales: en la posición inicial θ0, la partícula lleva una velocidad v0.
La velocidad v de la partícula en la posición angular θ es
La tensión del hilo es
Si no hay rozamiento γ=0,
Ecuación que se obtiene aplicando el principio de conservación de la energía
El estudio de los distintos casos es similar al de la página titulada Rozamiento en el bucle
Posición angular final, θ<π/2
Cuando la posición angular final θ<π/2, es el caso más simple de analizar ya que la tensión del hilo T es siempre positiva
Calculamos la velocidad inicial v0,π/2 que deberíamos impartir a la partícula en la posición inicial θ0 para que llegue justamente a la posición θ=π/2, (con velocidad nula)
Una expresión más simple se obtiene cuando la posición inicial θ0=0, el péndulo parte del origen
Si la velocidad inicial v0 es menor, entonces la posición final del péndulo θ1<π/2, que vamos a calcular resolviendo la ecuación transcendente por procedimiento
Supongamos que el péndulo parte del origen θ0=0, con velocidad v0 menor que la máxima v0, π/2. Sea k=γl=0.25, la velocidad máxima v0,π/2=1.2951 en unidades . Si el péndulo parte del origen con velocidad v0=0.25, llega a la posición final θ1=70.38°
k=0.25; %rozamiento v_max=sqrt((1+2*k*exp(k*pi))/(1+4*k^2)); %velocidad inicial para pi/2 disp(v_max) v0=1; %velocidad inicial f=@(x) v0^2*(1+4*k^2)+(cos(x)-2*k*sin(x))*exp(2*k*x)-1; th_1=fzero(f, [0, pi/2]); %posición final disp(th_1*180/pi)
1.2951 70.3839
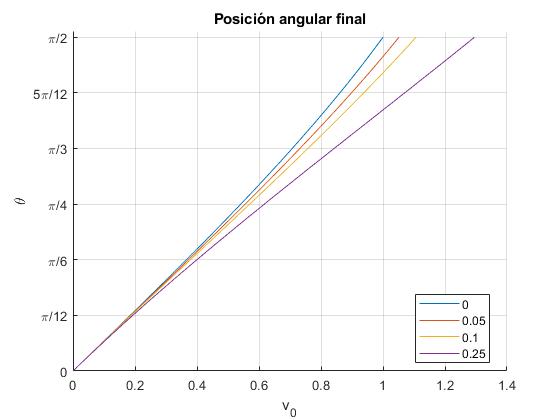
Representamos la posición final θ1 en función de la velocidad inicial , para varios valores de k=γl. La posición inicial θ0=0 (el péndulo parte del origen)
hold on
for k=[0,0.05,0.1,0.25] %rozamiento
v_max=sqrt((1+2*k*exp(k*pi))/(1+4*k^2)); %velocidad inicial para pi/2
vv=linspace(0,v_max,100);
th=zeros(1,length(vv));
th(end)=pi/2;
i=1;
for v0=vv(1:end-1)
f=@(x) v0^2*(1+4*k^2)+(cos(x)-2*k*sin(x))*exp(2*k*x)-1;
th(i)=fzero(f, [0, pi/2]);
i=i+1;
end
plot(vv,th, 'displayName',num2str(k)),
end
hold off
set(gca,'YTick',0:pi/12:pi/2)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3', '5\pi/12','\pi/2'})
xlabel('v_0')
ylabel('\theta')
grid on
legend('-DynamicLegend','location','best')
title('Posición angular final')
Posición angular final, π/2<θ<π
Para que la partícula pase por la posición más alta de su trayectoria θ=π, debe llevar una velocidad mínima. Aplicando la ecuación de la dinámica del movimiento circular
La velocidad mínima, se obtiene cuando la tensión del hilo T es cero
La velocidad inicial v0,π que deberá llevar la partícula para que llegue a la posición final θ=π con esta velocidad mínima v2=gl es
Si la velocidad inicial de la partícula es inferior a v0,π pero superior a v0,π/2, la posición angular final θ1>π/2 pero θ1<π. La posición final se obtiene cuando la tensión T del hilo se hace cero o bien, cuando la velocidad de la partícula vale (véase la figura)
A partir de esta posición, la partícula describe una trayectoria parabólica
La posición final θ1 se calcula resolviendo la ecuación transcendente por el procedimiento
Supongamos que el péndulo parte del origen θ0=0, con velocidad v0 mayor que v0,π/2 y menor que v0,π. Sea k=γl=0.25, la velocidad mínima v0,π/2=1.2951 y la máxima v0,π=2.6559 en unidades . Si el péndulo parte del origen con velocidad v0=1.8, llega a la posición final θ1=114.31°
k=0.25; %rozamiento v_min=sqrt((1+2*k*exp(k*pi))/(1+4*k^2)); %velocidad inicial para pi/2 v_max=sqrt((1+exp(2*k*pi))/(1+4*k^2)+exp(2*k*pi)/2); %velocidad inicial para pi disp([v_min,v_max]) v0=1.8; f=@(x) (1-(cos(x)-2*k*sin(x))*exp(2*k*x))/(1+4*k^2)-exp(2*k*x)*cos(x)/2-v0^2; th_1=fzero(f, [pi/2, pi]); disp(th_1*180/pi)
1.2951 2.6559 114.3149
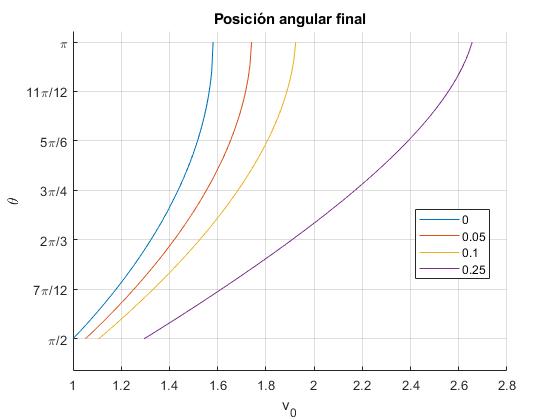
Representamos la posición final θ1 en función de la velocidad inicial , para varios valores de k=γl. La posición inicial θ0=0 (el péndulo parte del origen)
hold on
for k=[0,0.05,0.1,0.25]
v_min=sqrt((1+2*k*exp(k*pi))/(1+4*k^2)); %velocidad inicial para pi/2
v_max=sqrt((1+exp(2*k*pi))/(1+4*k^2)+exp(2*k*pi)/2); %v. inicial para pi
vv=linspace(v_min,v_max,100);
th=zeros(1,length(vv));
th(1)=pi/2;
th(end)=pi;
i=2;
for v0=vv(2:end-1)
f=@(x) (1-(cos(x)-2*k*sin(x))*exp(2*k*x))/(1+4*k^2)-exp(2*k*x)*cos(x)/2-
v0^2;
th(i)=fzero(f, [pi/2, pi]);
i=i+1;
end
plot(vv,th, 'displayName',num2str(k)),
end
hold off
set(gca,'YTick',pi/2:pi/12:pi)
set(gca,'YTickLabel',{'\pi/2','7\pi/12','2\pi/3','3\pi/4','5\pi/6', '11\pi/12',
'\pi'})
xlabel('v_0')
ylabel('\theta')
grid on
legend('-DynamicLegend','location','best')
title('Posición angular final')
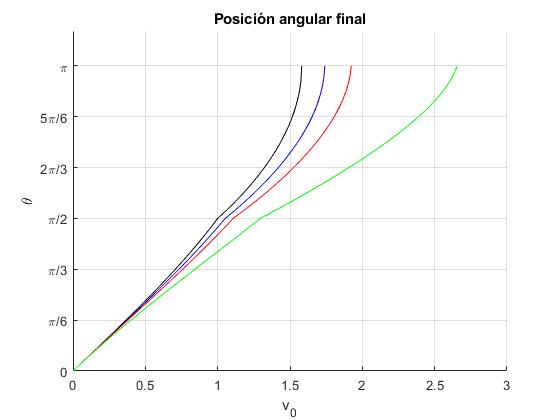
Unimos las dos porciones de código, para representar la posición final θ1 en función de la velocidad inicial para varios valores del parámetro k: 0 (negro), 0.05 (azul), 0.1 (rojo), 0.25 (verde)
hold on
colores=['k','b','r','g'];
indice=1;
for k=[0,0.05,0.1,0.25]
v_max=sqrt((1+2*k*exp(k*pi))/(1+4*k^2)); %velocidad inicial para pi/2
vv=linspace(0,v_max,100);
th=zeros(1,length(vv));
th(end)=pi/2;
i=1;
for v0=vv(1:end-1)
f=@(x) v0^2*(1+4*k^2)+(cos(x)-2*k*sin(x))*exp(2*k*x)-1;
th(i)=fzero(f, [0, pi/2]);
i=i+1;
end
plot(vv,th, colores(indice))
v_min=sqrt((1+2*k*exp(k*pi))/(1+4*k^2)); %velocidad inicial para pi/2
v_max=sqrt((1+exp(2*k*pi))/(1+4*k^2)+exp(2*k*pi)/2); %v. inicial para pi
vv=linspace(v_min,v_max,100);
th=zeros(1,length(vv));
th(1)=pi/2;
th(end)=pi;
i=2;
for v0=vv(2:end-1)
f=@(x) (1-(cos(x)-2*k*sin(x))*exp(2*k*x))/(1+4*k^2)-exp(2*k*x)*cos(x)/2-
v0^2;
th(i)=fzero(f, [pi/2, pi]);
i=i+1;
end
plot(vv,th, colores(indice))
indice=indice+1;
end
hold off
set(gca,'YTick',0:pi/6:pi)
set(gca,'YTickLabel',{'0','\pi/6','\pi/3','\pi/2','2\pi/3','5\pi/6','\pi'})
xlabel('v_0')
ylabel('\theta')
grid on
title('Posición angular final')
Posición angular final, π<θ<2π
Si la velocidad inicial v0 es mayor que v0,π, la tensión del hilo T en la posición más elevada θ=π es positiva y el movimiento del péndulo se extiende más allá, hasta que la tensión T se anule en el intervalo π<θ<3π/2.
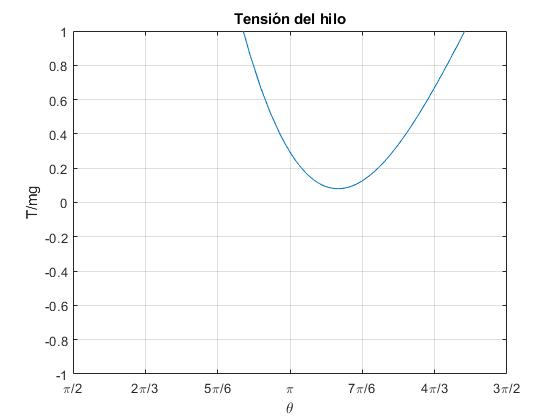
Por ejemplo, para k=0.5, v0,π=4.8622. Representamos la tensión T/(mg) del hilo en función del ángulo θ en el intervalo (π, 3π/2) para una velocidad inicial un poco mayor, v0=5.07
k=0.5; %rozamiento
v_max=sqrt((1+exp(2*k*pi))/(1+4*k^2)+exp(2*k*pi)/2); %velocidad inicial para pi
disp(v_max)
v0=5.07; %velocidad inicial
f=@(x) 2*v0^2*exp(-2*k*x)+2*(cos(x)-2*k*sin(x)-exp(-2*k*x))/(1+4*k^2)+cos(x);
hold on
fplot(f, [pi/2,3*pi/2])
line([2*pi/3,3*pi/2],[0,0],'color','k')
plot(198*pi/180,0,'o','markersize',3,'markeredgecolor','r','markerfacecolor','r')
line([198*pi/180,198*pi/180],[-1,0],'color','k','lineStyle','--')
hold off
set(gca,'XTick',pi/2:pi/6:3*pi/2)
set(gca,'XTickLabel',{'\pi/2','2\pi/3','5\pi/6','\pi','7\pi/6', '4\pi/3','3\pi/2'})
xlabel('\theta')
ylabel('T/mg')
grid on
ylim([-1,1])
title('Tensión del hilo')
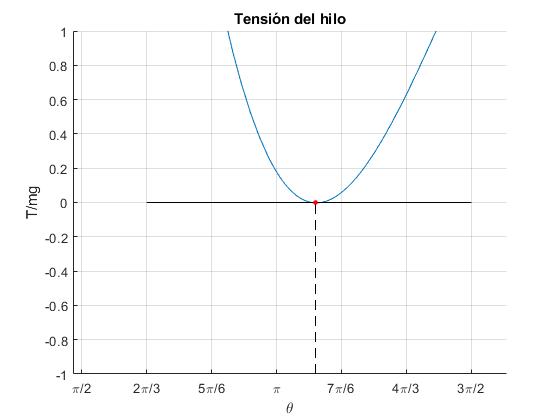
4.8622
Observamos que la tensión del hilo es positiva, toma un valor próximo a cero para un ángulo cercano a θc=198°. Para este ángulo crítico, la tensión T y su derivada dT/dθ (pendiente de la recta tangente) se anulan simultáneamente, tal como apreciamos en la figura. El péndulo continuará su movimiento hasta alcanzar el punto más bajo de su trayectoria θ=2π
Para hacer los cálculos más sencillos, supongamos que partimos del origen θ0=0. La tensión del hilo es
Su derivada es
Resolvemos el sistema de dos ecuaciones con dos incógnitas, el ángulo crítico θc y la velocidad inicial crítica v0,2π
Eliminamos v0 y llegamos a la ecuación
que es un ángulo del tercer cuadrante. Una vez calculado este ángulo θc despejamos la velocidad inicial crítica, v0,2π, tomando la primera del sistema de dos ecuaciones
>> k=0.5; >> th_c=pi+atan(2*k/3) %ángulo del tercer cuadrante th_c = 3.4633 >> v_c=sqrt(((2*k*sin(th_c)-cos(th_c))*exp(2*k*th_c)+1)/(1+4*k^2)- exp(2*k*th_c)*cos(th_c)/2) v_c = 5.0732 %velocidad inicial crítica >> f(3.4633) %tensión del hilo ans = -2.5339e-05
Una velocidad inicial v0 menor que la crítica v0,2π, pero mayor que v0,π
Implica que la tensión se hará cero para un determinado ángulo π<θ<θc, por ejemplo, para v0=5.
k=0.5; %rozamiento
v_max=sqrt((1+exp(2*k*pi))/(1+4*k^2)+exp(2*k*pi)/2); %velocidad inicial para pi
disp(v_max)
v0=5; %velocidad inicial
f=@(x) 2*v0^2*exp(-2*k*x)+2*(cos(x)-2*k*sin(x)-exp(-2*k*x))/(1+4*k^2)+cos(x);
fplot(f, [pi/2,3*pi/2])
set(gca,'XTick',pi/2:pi/6:3*pi/2)
set(gca,'XTickLabel',{'\pi/2','2\pi/3','5\pi/6','\pi','7\pi/6', '4\pi/3',
'3\pi/2'})
xlabel('\theta')
ylabel('T/mg')
grid on
ylim([-1,1])
title('Tensión del hilo')
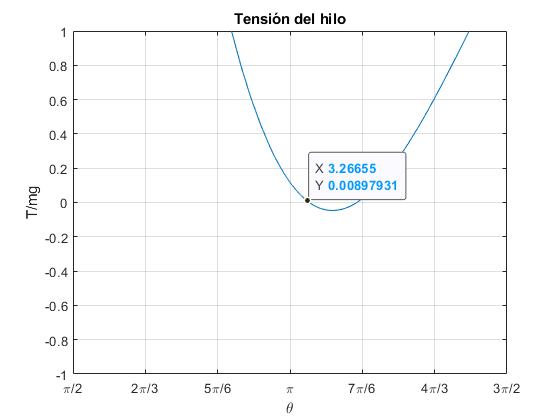
>> fzero(f,[pi,3.4633]) ans = 3.2815
Una velocidad inicial mayor que la crítica v0,2π
Implica que la tensión se mantendrá positiva y el péndulo llegará al punto más bajo de su trayectoria θ=2π, iniciándose un nuevo ciclo, por ejemplo, para v0=5.2. Para obtener esta representación gráfica, en el script cambiamos el valor de la velocidad inicial
Posición angular final, θ≥2π
Cuando la velocidad inicial en el origen θ0=0, es v0≥v0,2π el péndulo completa una vuelta θ=2π y regresa a la posición de partida. La nueva velocidad inicial de la partícula es
Con esta velocidad inicial, hay que volver a analizar el movimiento del péndulo para el valor dado de k=γ·l
Oscilaciones amortiguadas
El caso más importante se produce cuando la posición final θ1<π/2. El primero tratado en esta página.
El péndulo se mueve en el sentido contrario a las agujas del reloj, v>0.
El péndulo se mueve en el sentido de las agujas del reloj, v<0.
El péndulo se mueve en el sentido contrario a las agujas del reloj, v>0.
El péndulo se mueve en el sentido de las agujas del reloj, v<0.
Como ya se ha analizado, la ecuación diferencial que describe el movimiento desde θ0 con velocidad v0 hasta θ1 en reposo es
La solución, con la condición inicial: en la posición θ0 la velocidad inicial es v0
El péndulo se detiene para el ángulo θ1, solución de la ecuación transcendente
Cuando el péndulo inicial el camino de vuelta, la velocidad cambia de signo v<0 y la fuerza de rozamiento también, la ecuación del movimiento es
Llamando z=v2, la solución particular es z1=Asinθ+Bcosθ que introducimos en la ecuación diferencial para calcular los coeficientes A y B
La solución de la homogénea es z2=C·exp(2γlθ). La solución completa es v2=z1+z2
Es la misma solución deducida anteriormente, sustituyendo γ por -γ
El coeficiente C se determina a partir de las condiciones iniciales: en la posición inicial θ1, el móvil parte del reposo.
El péndulo se detiene para el ángulo θ2, solución de la ecuación transcendente
El péndulo parte en reposo desde la posición θ2, su velocidad es v>0,
El péndulo se detiene para el ángulo θ3, solución de la ecuación transcendente
y así, sucesivamente
Representamos el movimiento del péndulo en el espacio de las fases para k=0.5. El péndulo parte del origen θ0=0, con velocidad inicial v0<v0,π/2=1.2951
k=0.25; %rozamiento
v_max=sqrt((1+2*k*exp(k*pi))/(1+4*k^2)); %velocidad inicial para pi/2
disp(v_max)
v0=1.2; %velocidad inicial
f=@(x) v0^2*(1+4*k^2)+(cos(x)-2*k*sin(x))*exp(2*k*x)-1;
th_1=fzero(f,[0,pi/2]); %posición angular final
th=linspace(0,th_1,100);
xx=th(2:end-1);
v=@(x) sqrt(v0^2*exp(-2*k*x)+(cos(x)-2*k*sin(x)-exp(-2*k*x))/(1+4*k^2));
y=[v0,v(xx),0];
hold on
plot(th,y);
for i=1:10
f=@(x) cos(x)+2*k*sin(x)-(cos(th_1)+2*k*sin(th_1))*exp(2*k*(x-th_1));
th_2=fzero(f,[0,-th_1]);
th=linspace(th_2,th_1,100);
xx=th(2:end-1);
%los puntos de retorno x(1) y x(end) tienen velocidad cero
v=@(x) sqrt((cos(x)+2*k*sin(x)-(cos(th_1)+2*k*sin(th_1))*
exp(2*k*(x-th_1)))/(1+4*k^2));
y=[0,v(xx),0];
plot(th,-sign(k)*y);
th_1=th_2;
k=-k;
end
hold off
grid on
set(gca,'XTick',-pi/2:pi/6:pi/2)
set(gca,'XTickLabel',{'-\pi/2','-\pi/3','-\pi/6','0','\pi/6', '\pi/3','\pi/2'})
xlabel('\theta')
ylabel('v')
title('Espacio de las fases')
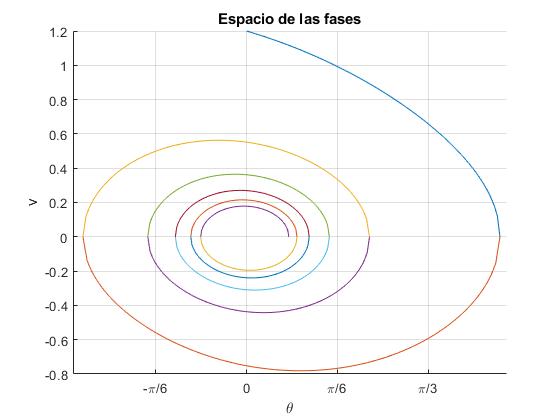
1.2951
Actividades
Se introduce
- El coeficiente de rozamiento, k en el control titulado Coeficiente
- La velocidad inicial v0, en unidades en el control titulado Velocidad inicial
- Se ha fijado la longitud del péndulo l=1
Se pulsa el botón titulado Nuevo y se observa el movimiento del péngulo
En la parte izquierda, se proporcionanlos datos del tiempo t, la posición angular θ, en grados, la velocidad angular ω=dθ/dt, y la tensión del hilo T
Cuando la velocidad v es cero, el cuerpo se detiene. Cuando la tensión del hilo T es nula, el cuerpo describe una trayectoria parabólica.
En la parte derecha, se representa el balance energético: la energía cinética (en color rojo), la energía potencial (en color azul) y el trabajo de la fuerza de rozamiento (en color negro)
Referencias
Marko V Lubarda, Vlado A Lubarda. An analysis of pendulum motion in the presence of quadratic and linear drag. Eur. J. Phys. 42 (2021) 055014