

Oscilador amortiguado por una fuerza proporcional al cuadrado de la velocidad
Masa unida a un muelle elástico
Las fuerzas que actúan sobre el móvil son: la fuerza elástica F=-kx, y la fuerza de rozamiento de sentido contrario a la velocidad Fr=-λv2, donde λ es una constante que depende del sistema físico particular.
Dado que v2 es positivo, λ será positiva si v>0 y negativa si v<0
La ecuación del movimiento se escribe
ma=-kx-λv2
Expresamos la ecuación del movimiento en forma de ecuación diferencial, teniendo en cuenta que la aceleración es la derivada segunda de la posición x, y la velocidad es la derivada primera de x.
- ω0 es la frecuencia natural o propia del oscilador
- γ es la constante de amortiguamiento
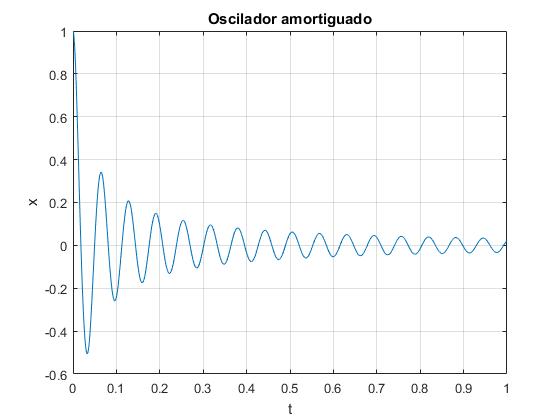
Solucción numérica
Resolvemos la ecuación diferencial por procedimientos numéricos, con las siguientes condiciones iniciales: en el instante t=0, el móvil parte en reposo dx/dt=0 desde x=x0
w0=100; %frecuencia angular rad/s
g=0.7; %constante en 1/m
x0=1; %posición inicial
f=@(t,x) [x(2);-g*x(2)^2*sign(x(2))-w0*w0*x(1)];
[t,x]=ode45(f,[0,1],[x0,0]);
plot(t, x(:,1))
grid on
xlabel('t')
ylabel('x');
title('Oscilador amortiguado')
Solución analítica
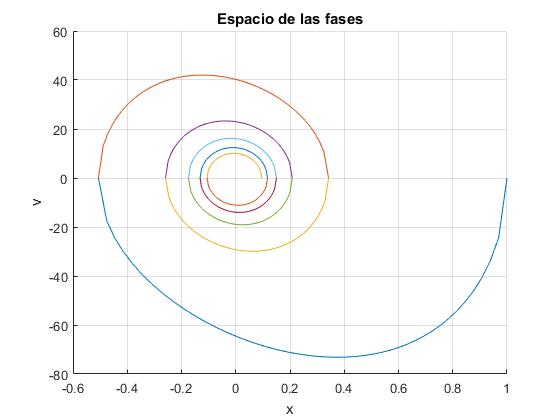
El espacio de las fases nos muestra otra perspectiva del comportamiento del oscilador. Se representa el momento lineal (o la velocidad) v en el eje vertical y la posición del móvil x en el eje horizontal.
Transformamos la ecuación diferencial de segundo orden en x y t en una de primer orden en v y x
La solución particular es z1=Ax+B que introducimos en la ecuación diferencial para calcular los coeficientes A y B
La solución de la homogénea es z2=C·exp(-2γx). La solución completa es z=z1+z2
El coeficiente C se determina a partir de las condiciones iniciales: en la posición inicial x0, el móvil parte del reposo, v=0
Vamos a representar la velocidad v en función de la posición x del móvil

Primera etapa
Partimos de x0>0 con velocidad inicial v=0, la partícula se mueve hacia la izquierda v<0 (γ<0) hasta que se detiene en x1. Esta posición es la raíz de la ecuación transcendente
Una vez calculado x1 se representa la función v(x) en el intervalo (x1, x0)
donde la función sgn(γ) indica que si γ<0 entonces v<0
Segunda etapa
Ahora x1 es la posición de partida y la partícula, se mueve hacia la derecha v>0 y por tanto, γ>0. La posición x2 se calcula resolviendo la ecuación transcendente con γ cambiado de signo
Una vez calculado x2 se representa la función v(x) en el intervalo (x1, x2), donde la función sgn(γ) indica que si γ>0 entonces v>0
Se ha completado el primer periodo, se repite las dos etapas para los siguientes. El código MATLAB que calcula 10 semiperiodos es el siguiente
w0=100; %frecuencia angular rad/s
g=0.7; %constante de amortiguamiento
x0=1; %posición inicial
hold on
for i=1:10
g=-g;
f=@(x) (x0-1/(2*g))*exp(-2*g*(x-x0))-(x-1/(2*g));
x1=fzero(f,-x0);
x=linspace(x1,x0,50);
xx=x(2:end-1);
%los puntos de retorno x(1) y x(end) tienen velocidad cero
y=[0,w0*sqrt(f(xx)/g),0];
plot(x,sign(g)*y);
x0=x1;
end
hold off
grid on
xlabel('x')
ylabel('v')
title('Espacio de las fases')
Dispositivo experimental
El dispositivo experimental es un péndulo formado por una varilla de masa m y longitud L unida a un disco de masa M y radio R, perpendicular a la dirección de la velocidad, tal como se muestra en la figura.
El momento de inercia respecto de un eje perpendicular al plano de oscilación y que pasa por O es la suma de los momentos de inercia
- de la varilla respecto a un eje perpendicular que pasa por uno de sus extremos
- de un disco respecto de un eje paralelo distante L del eje contenido en el plano del disco y que pasa por su centro
Aplicando el teorema de Steiner
La posición del dentro de masas, su distancia al centro O es
Las fuerzas sobre el péndulo son
El peso (m+M)g que actúa en el centro de masas
Una fuerza de rozamiento proporcional al cuadrado de la velocidad en el centro del disco. Despreciaremos la fuerza de rozamiento sobre la varilla que supondremos delgada
- La densida del fluido, aire, ρf=1.21 kg/m3
- Coeficiente de arrastre, CD=1.2 para un disco
- Area del disco, A=πR2
- La velocidad del centro del disco es v=ωL
La variación de energía (cinética más potencial) entre los instantes t y t+dt, el péndulo se desplaza dθ y su cambio de velocidad es dω, es igual al trabajo de la fuerza de rozamiento entre dichos instantes -Mr·dθ.
El momento de Mr respecto del centro O es Mr=FrL, el trabajo de la fuerza de rozamiento en el movimiento de rotación es
El cambio de energía cinética es
El cambio de energía potencial es
La fuerza de rozamiento es de sentido contrario al vector velocidad
Cuando el péndulo se ha desplazado θ de la posición de equelibrio estable, su energía potencial referida al centro O, es
La relación entre estas tres magnitudes es
Dividiendo por I/2, llamando z=ω2 y definiendo los parámetros a y b del siguiente modo
Obtenemos la ecuación diferencial
Teniendo en cuenta que
La ecuación diferencial se integra fácilmente, suponiendo que el péndulo se suelta ω=0, z=0 en el instante t=0, desde la posición θ0
Integrando por partes dos veces
El cuadrado de la velocidad angular vale
La posición de retorno ω=0, es la raíz θ1 de la ecuación trascendente
Al cambiar el signo de la velocidad angular ω después de cada posición de retorno ω=0, debe cambiar el signo del parámetro b, con el fin de asegurar que la fuerza de rozamiento es de sentido opuesto a la velocidad
Ejemplo
- longitud de la varilla, L=38 cm
- masa de la varilla, m=12.8 g
- radio del disco, R=6 cm
- masa del disco, M=15.2 g
Con estos datos obtenemos: a=56.9543, b=0.3190 s-2
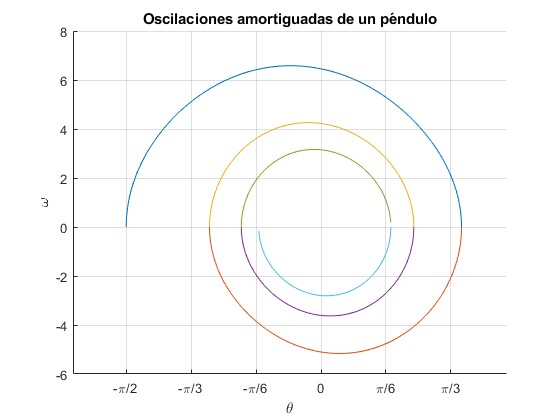
Sea la posición inicial θ0=-π/2 (90°) en el instante t=0
Se calcula la posición final de retorno θ1=1.1334 (65°), resolviendo la ecuación trascendente
Se representa la función ω=ω(θ) desde θ0=-π/2 (90°) a θ1=1.1334 (65°)
Se cambia el signo de b
θ0=1.1334 (65°) es la nueva posición inicial
Se calcula la posición final de retorno θ1=-0.8991 (-51.5°) resolviendo la ecuación trascendente
Se representa la función ω=-ω(θ) desde θ0=1.1334 (65°) a θ1=-0.8991 (-51.5°)
Se cambia el signo de b
θ0=-0.8991 (-51.5°) es la nueva posición inicial
Se repiten los ocho pasos...
L=38/100; %longitud varilla
m=12.8/1000; %masa varilla
R=6/100; %radio disco
M=15.2/1000; %masa disco
c_d=1.2; %coeficiente de forma
A=pi*R^2; %área del disco
rho=1.21; %densidad del aire
b=c_d*rho*A*L/(m/3+M*(R/L)^2/4+M); %parámetros
a=(m+2*M)*(9.8/L)/(m/3+M*(R/L)^2/4+M);
th_0=-pi/2; %posición de partida
hold on
for k=1:3
f=@(x) cos(x)-b*sin(x)-(cos(th_0)-b*sin(th_0))*exp(b*(th_0-x));
th_1=fzero(f,[0,pi/2]);
disp(th_1*180/pi)
g=@(x) sqrt(a*f(x)/(1+b^2));
fplot(g,[th_0,th_1])
th_0=th_1;
b=-b;
f=@(x) cos(x)-b*sin(x)-(cos(th_0)-b*sin(th_0))*exp(b*(th_0-x));
th_1=fzero(f,[0,-pi/2]);
disp(th_1*180/pi)
g=@(x) -sqrt(a*f(x)/(1+b^2));
fplot(g,[th_1,th_0])
th_0=th_1;
b=-b;
end
hold off
set(gca,'XTick',-pi/2:pi/6:pi/2)
set(gca,'XTickLabel',{'-\pi/2','-\pi/3','-\pi/6','0','\pi/6', '\pi/3','\pi/2'})
grid on
xlabel('\theta')
ylabel('\omega')
title('Oscilaciones amortiguadas de un péndulo')
Referencias
Carl E Mungan, Trevor C Lipscombe. Oscillations of a quadratically damped pendulum. Eur. J. Phys. 34 (2013) pp. 1243–1253