

Oscilaciones amortiguadas por la fuerza de Coriolis
En el péndulo giratorio de Pohl, la fuerza de rozamiento proporcional a la velocidad se origina por la acción del campo magnético producido por dos bobinas sobre las corrientes inducidas en el anillo de cobre. En el oscilador de PASCO es el campo magnético producido por un potente imán permente sobre las corrientes inducidas en un disco de aluminio, el que produce dicha fuerza. Vamos a describir en esta sección otra posibilidad
Consideremos una varilla que puede girar en el plano horizontal con velocidad angular Ω constante alrededor de un eje perpendicular a la varilla. La varilla tiene dos muelles de constante k unidos a un anillo de masa m que puede desplazarse a lo largo de la varilla. Los extremos de los muelles están fijados a los extremos de la varilla tal como puede se puede ver en la figura
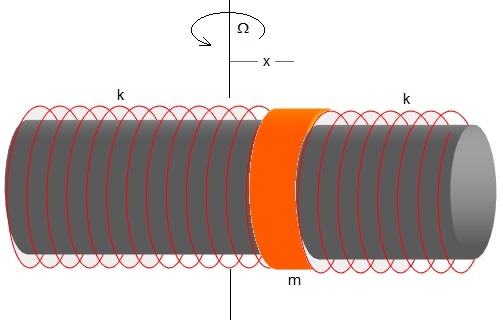
Representamos las fuerzas sobre el anillo de masa m en el instante t, cuando se ha desplazado x del eje de rotación y lleva una velocidad dx/dt
Para que el problema sea más simple, supondremos que el dispositivo está en el espacio, el peso del anillo mg y la reacción N de la varilla se consideran despreciables
Las fuerzas que ejercen los muelles elásticos, 2kx
La fuerza centrífuga, , de módulo mΩ2x, ambas en la dirección radial
La fuerza de Coriolis, es perpendicular a la varilla y su sentido se indica en la figura. La reacción N' o fuerza que ejerce la varilla sobre el anillo es de sentido contrario.
- Si hay rozamiento, la fuerza F'r=μkN' es de sentido opuesto a la velocidad del anillo
Cuando el anillo está en resposo dx/dt=0, N'=0, la fuerza de rozamiento es nula. No hay fuerza de rozamiento estática
La ecuación del movimiento en el Sistema de Referencia no inercial (en rotación) de la varilla es
Nueva posición de equilibrio
El caso más sencillo se produce cuando las fuerzas que ejercen los muelles 2kx son iguales a la fuerza centrífuga, mΩ2x, es decir, , donde Ωf es la velocidad angular de rotación
Como la velocidad v=dx/dt, integrando de nuevo, con la condición de que en el instante t=0, el anillo parte del origen x=0 con velocidad inicial v0
El anillo tiende hacia la posición final x∞ sin oscilar, después de un tiempo t→∞
Oscilaciones, amortiguadas, críticas y sobreamortiguadas
Para que el anillo oscile se tiene que cumplir que la frecuencia natural ω0>0, es decir, la velocidad angular de rotación Ω<Ωf
Amortiguada
Crítica
Sobreamortiguada
Para que la oscilación sea amortiguada γ<ω0.
La ecuación de una oscilación amortiguada, con las condiciones iniciales t=0, x=0, y dx/dt=v0 es
La velocidad angular crítica Ωc es aquella para la que se cumple γ=ω0
La ecuación de una oscilación crítica, con las condiciones iniciales t=0, x=0, y dx/dt=v0 es
La ecuación de una oscilación sobreamortiguada, con las condiciones iniciales t=0, x=0, y dx/dt=v0 es
Ejemplo
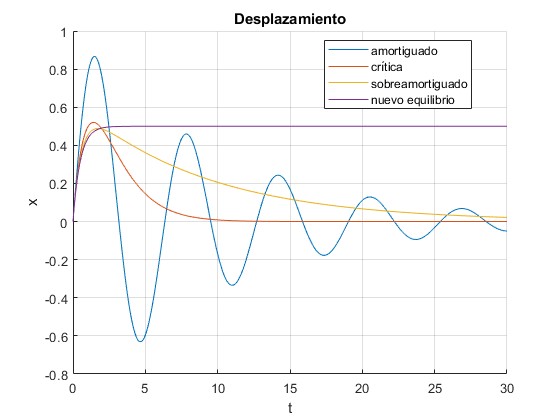
Representamos el desplazamiento x de un anillo en función del tiempo t para varias velocidades angulares de rotación Ω. Los datos son
- masa, m=1 kg
- constante elástica de los muelles, 2k= 1 N/m
- coeficiente cinético, μk=1
- posición inicial del anillo, x0=0
- velocidad inicial del anillo v0=1 m/s
para los cuatro casos siguientes: la velocidad angular de rotación es Ω=0.1, , 0.9 y 1 rad/s
mu=1; %coeficiente cinético
v0=1; %velocidad inicial
m=1; %masa
k=0.5; %constante elástica
hold on
W=0.1; %amortiguado
gamma=mu*W;
w0=sqrt(2*k-W^2);
w=sqrt(w0^2-gamma^2);
fplot(@(t) v0*exp(-gamma*t).*sin(w*t)/w,[0,30])
W=1/sqrt(2); %crítica
gamma=mu*W;
fplot(@(t) v0*t.*exp(-gamma*t),[0,30])
W=0.9; %sobreamortiguado
gamma=mu*W;
w0=sqrt(2*k-W^2);
w=sqrt(gamma^2-w0^2);
fplot(@(t) v0*exp(-gamma*t).*sinh(w*t)/w,[0,30])
W=1; %nueva posición de equilibrio
w0=0;
gamma=mu*W;
fplot(@(t) v0*(1-exp(-2*gamma*t))/(2*gamma),[0,30])
hold off
legend('amortiguado','sobreamortiguado','nuevo equilibrio','location', 'best')
xlabel('t')
ylabel('x')
grid on
title('Desplazamiento')
Cuando la velocidad angular de rotación, Ω>Ωf
A medida que incrementamos la velocidad angular de rotación Ω, pasamos de oscilaciones amortiguadas, Ω<Ωc, a críticas, Ω=Ωc, a sobreamortiguadas, Ω>Ωc. En el límite, cuando Ω=Ωf, al nuevo estado de equilibrio.
En este apartado estudiamos el caso Ω>Ωf
Las raíces de la ecuación característica son
La solución de la ecuación diferencial es
Derivando con respecto del tiempo obtenemos la velocidad
Los coeficientes A y B se determinan a partir de las condiciones iniciales
La posición del anillo x es
Consideramos dos casos particulares
El anillo parte del origen x0=0, con velocidad v0
El anillo parte en reposo, v0=0, desde la posición x0
Representamos el desplazamiento x de un anillo en función del tiempo t . Los datos son
- masa, m=1 kg
- constante elástica de los muelles, 2k= 1 N/m
- coeficiente cinético, μk=1
- velocidad angular de rotación Ω=1.5 rad/s
- posición inicial del anillo, x0=0.2, en reposo, v0=0
- velocidad inicial del anillo v0=0.5 m/s en el origen x0=0
mu=1; %coeficiente cinético
m=1; %masa
k=0.5; %constante elástica
hold on
W=1.5; %velocidad angular de rotación W>Wf
gamma=mu*W;
w0=sqrt(W^2-2*k/m);
w=sqrt(gamma^2+w0^2);
v0=0.5; %velocidad inicial
f=@(t) v0*exp(-gamma*t).*sinh(w*t)/w;
g=@(t) f(t)-1;
tf=fzero(g,[0,10]);
fplot(f,[0,tf])
x0=0.1; %posición inicial
f=@(t) x0*exp(-gamma*t).*(gamma*sinh(w*t)+w*cosh(w*t))/w;
g=@(t) f(t)-1;
tf=fzero(g,[0,10]);
fplot(f,[0,tf])
hold off
legend('velocidad','posición','location', 'best')
xlabel('t (s)')
ylabel('x (m)')
grid on
title('Desplazamiento')
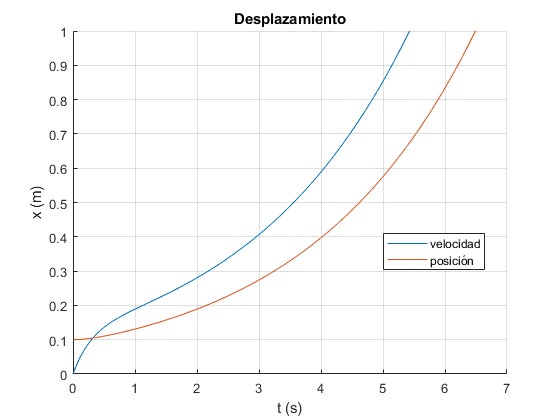
El tiempo final tf se obtiene cuando x=1, que es el desplazamiento máximo del anillo. Para calcular este tiempo, resolvemos la ecuación transcendente empleando la función
Posible ampliación
Si tenemos en cuenta el peso mg del anillo y la reacción N=mg de la varilla. Tendríamos además, una fuerza de rozamiento constante Fr=μkN para añadir a la ecuación del movimiento
Un caso análogo se estudia en la página titulada Oscilaciones amortiguadas combinación de una fuerza de rozamiento constante y otra proporcional a la velocidad
Actividades
Se introduce
- la velocidad angular de rotación, Ω en el control titulado Velocidad angular hasta un máximo de Ωf=1 rad/s
Se han fijado los parámetros
- masa, m=1 kg
- constante elástica de los muelles, 2k= 1 N/m
- coeficiente cinético, μk=1
- posición inicial del anillo, x0=0
- velocidad inicial del anillo v0=1 m/s
En la parte superior izquierda, se proporcionan los datos del tiempo t y el desplzamiento x del anillo
Se pulsa el botón titulado Nuevo.
Referencias
Dejan M. Djokić. Dry Friction Camouflaged in Viscous Drag. THE PHYSICS TEACHER, Vol.58, May 2020, pp. 340-341
Carl E. Mungan. Letters to the editor. THE PHYSICS TEACHER, Vol.58, November 2020, pp. 532-533