El péndulo simple
Ecuaciones del movimiento
Si la partícula se desplaza a una posición θ0 (ángulo que hace el hilo con la vertical) y luego se suelta, el péndulo comienza a oscilar.
El péndulo describe una trayectoria circular, un arco de una circunferencia de radio l. Estudiaremos su movimiento en la dirección tangencial y en la dirección normal.
Las fuerzas que actúan sobre la partícula de masa m son dos
- el peso mg
- La tensión T del hilo
Ecuación del movimiento en la dirección radial
La aceleración de la partícula es an=v2/l dirigida radialmente hacia el centro de su trayectoria circular.
La segunda ley de Newton se escribe
man=T-mg·cosθ
Conocido el valor de la velocidad v en la posición angular θ determinamos la tensión T del hilo, (véase el apartado conservación de la energía)
La tensión T del hilo es máxima, cuando el péndulo pasa por la posición de equilibrio, T=mg+mv2/l
Es mínima, en los extremos de su trayectoria cuando la velocidad es cero, T=mgcosθ0
Ecuación del movimiento en la dirección tangencial
La aceleración de la partícula es at=dv/dt.
La segunda ley de Newton se escribe
mat=-mg·sinθ
La relación entre la aceleración tangencial at y la aceleración angular α es at=α·l. La ecuación del movimiento se escribe en forma de ecuación diferencial
Solución numérica
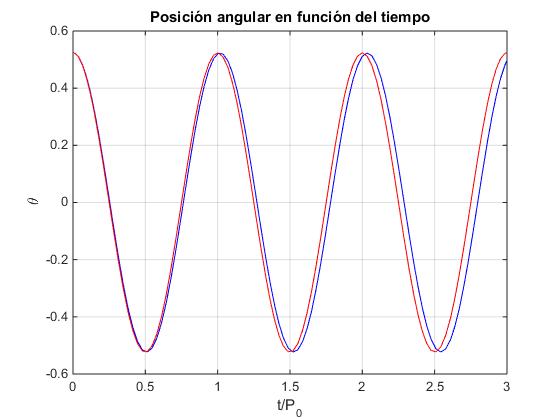
Escribimos la ecuación diferencial del movimiento en términos de la variable adimensional τ=t/P0. Donde P0 es el periodo del las oscilaciones cuando la amplitud es pequeña (véase más abajo)
Utilizamos el procedimiento ode45 de MATLAB para integrar la ecuación duferencial de segundo orden con las siguientes condiciones iniciales τ=0, θ0=π/6, dθ/dτ=0.
En la aproximación de oscilaciones de pequeña amplitud, el péndulo parte en el instante t=0 de la posición θ0=π/6, con velocidad inicial dθ/dτ=0. Por lo que la amplitud es π/6 y la fase inicial π/2. La ecuación del Movimiento Armónico Simple es θ=(π/6)·sin(2πτ+π/2)
x0=zeros(1,2);
x0(1)=pi/6;
x0(2)=0;
f=@(t,x) [x(2);-4*pi^2*sin(x(1))];
tspan=[0 3];
[t,x]=ode45(f,tspan,x0);
xx=(pi/6)*sin(2*pi*t+pi/2);
plot(t,x(:,1),'b',t,xx,'r')
grid on
xlabel('t/P_0')
ylabel('\theta');
title('Posición angular en función del tiempo')
Conservación de la energía
En la posición θ=θ0 el péndulo solamente tiene energía potencial, que se transforma en energía cinética cuando el péndulo pasa por la posición de equilibrio.
Comparemos dos posiciones del péndulo:
En la posición extrema θ=θ0, la energía es solamente potencial.
E=mg(l-l·cosθ0)
En la posición θ, la energía del péndulo es parte cinética y la otra parte potencial
La energía se conserva
v2=2gl(cosθ-cosθ0)
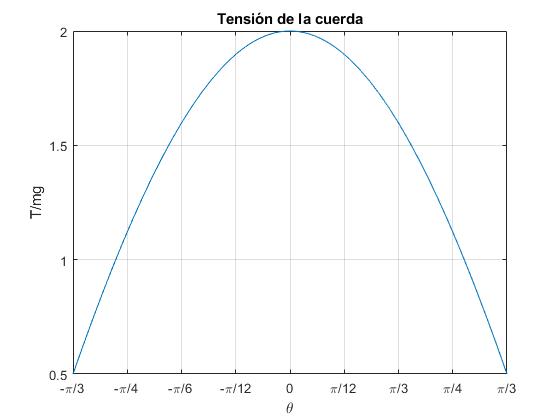
Tensión de la cuerda
La tensión de la cuerda en función del ángulo θ es
T=mg(3cosθ-2cosθ0)
La tensión de la cuerda no es constante, sino que varía con la posición angular θ. Su valor máximo se alcanza cuando θ=0, el péndulo pasa por la posición de equilibrio (la velocidad es máxima). Su valor mínimo, cuando θ=θ0 (la velocidad es nula).
th=pi/3;
fplot(@(x) 3*cos(x)-2*cos(th),[-pi/3,pi/3])
grid on
set(gca,'XTick',-pi/3:pi/12:pi/3)
set(gca,'XTickLabel',{'-\pi/3','-\pi/4','-\pi/6','-\pi/12','0',
'\pi/12','\pi/3','\pi/4','\pi/3'})
xlabel('\theta')
ylabel('T/mg')
title('Tensión de la cuerda')
Las componentes rectangulares de la tensión de la cuerda son:
Oscilaciones de pequeña amplitud
Cuando el ángulo θ es pequeño entonces, sinθ ≈ θ. La ecuación diferencial que describe las oscilaciones del péndulo se escribe
La solución de esta ecuación diferencial es
θ=Asin(ωt)+Bcos(ωt), con frecuencia angular ω2=g/l
Los coeficientes A y B se determina a partir de las condiciones iniciales, la posición angular θ0 y velocidad angular w0=(dθ/dt)0
Habitualmente, el péngulo se separa θ0 de la posición de equilibrio y se suelta, la velocidad angular inicial es w0=0. La ecuación del movimiento es
θ=θ0cos(ωt)
El periodo, P0=2π/ω, del péndulo es
Experiencia de laboratorio

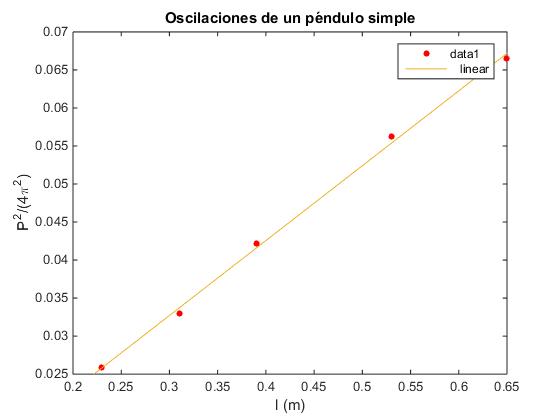
En una experiencia se han medido los periodos P de péndulos simples de longitud l. A partir de estos datos, se le pide calcular la aceleración de la gravedad g
| l(cm) | P(s) |
|---|---|
| 23 | 1.01 |
| 31 | 1.14 |
| 39 | 1.29 |
| 53 | 1.49 |
| 65 | 1.62 |
En un sistema de ejes, se representa:
- P2/(4π2) en el eje vertical,
- la longitud l en m el eje horizontal,
se calcula y traza la recta que mejor ajusta a los datos y cuya pendiente es la inversa de la la aceleración de la gravedad g.
>> x=[23 31 39 53 65]/100;
>> y=[1.01 1.14 1.29 1.49 1.62].^2/(4*pi^2);
>> plot(x,y,'ro','markersize',4,'markerfacecolor','r')
>> xlabel('l (m)')
>> ylabel('P^2/(4\pi^2)')
>> title('Oscilaciones de un péndulo simple')
En la ventana gráfica de MATLAB elegimos Tools/Basic fitting, activamos la casilla linear y obtenemos para la pendiente de la recta que mejor ajusta a los datos experimentales p1=0.098468. Por tanto, la aceleración de la gravedad es g=1/p1=10.1 m/s2