

Una calle llena de obstáculos
En esta página, el modelo de calle irregular viene descrita por la función y0=Asin(2πx/λ)

En la figura, observamos un muelle elástico de constante k en posición vertical. Su altura sin deformar es l0. Cuando colocamos encima del muelle una partícula de masa m, su peso mg se equilibra con la fuerza que ejerce el muelle deformado kΔy. El muelle se deforma Δy=mg/k. La altura inicial de la partícula es l0-mg/k, tal como vemos a la izquerda de la figura
Un automóvil viaja con velocidad horizontal constante v. Se encuentra con un obstáculo dispuesto a lo ancho de la calle cuya forma está descrita por una función f(x) .
En un instante t, la posición de la masa puntual es (x,y), con x=vt. Las fuerzas sobre la partícula (parte derecha de la figura) son:
El peso, mg
La fuerza que ejerce el muelle deformado y-y0-l0.
Supondremos que actúa una fuerza de rozamiento proporcional a la velocidad relativa
y0=f(x) es la posición de la parte inferior del muelle
La ecuación del movimiento de la partícula en la dirección vertical es
Llamando
La ecuación diferencial se expresa
El segundo miembro es la fuerza oscilante por unidad de masa
La solución de la homogénea para γ<ω0 (oscilaciones amortiguadas) es,
Los coeficientes B1 y B2 se determinan a partir de las condiciones iniciales
La solución particular es
Introducimos la solución particular en la ecuación diferencial, para obtener los coeficientes C y D
La solución completa z=zh+zp es
La derivada dz/dt respecto del tiempo es
Las condiciones iniciales son
El móvil parte del origen en reposo. Los coeficientes B1 y B2 son
El resultado final es
El estado estacionario
En el estado estacionario, t→∞, se termina el estado transsitorio descrito por la solución homogénea y se establece la solución particular de la ecuación diferencial
Representamos z(t) con los siguientes datos
- Frecuencia propia ω0=16
- Frecuencia de la fuerza oscilante ωf=16
- Constante de amortiguamiento γ=2
g=2; %gamma
w0=16; %frecuencia propia
wf=16; %frecuencia de la fuerza oscilante
w=sqrt(w0^2-g^2);
zs=@(t) (((w0^2-wf^2)*w0^2+4*g^2*wf^2)*sin(wf*t)-2*g*wf^3*cos(wf*t))
/((w0^2-wf^2)^2+4*g^2*wf^2);
z=@(t) (2*g*wf^3*(exp(-g*t).*cos(w*t)-cos(wf*t))+
((w0^2-wf^2)*w0^2+4*g^2*wf^2)*sin(wf*t)-wf*((w0^2-wf^2)*w0^2
+2*g^2*wf^2)*exp(-g*t).*sin(w*t)/w)/((w0^2-wf^2)^2+4*g^2*wf^2);
hold on
fplot(z,[0,8])
fplot(zs,[5,8])
hold off
grid on
legend('transitorio','estacionario','Location','best')
xlabel('t')
ylabel('z')
title('Estado transitorio y estacionario')
![]()
Expresamos la solución particular de la ecuación diferencial que describe el oscilador forzado, de la forma equivalente
Calculamos la amplitud A0 y la fase δ
Representamos la amplitud A0 en función de la frecuencia ωf de la fuerza oscilante.
- Frecuencia propia ω0=16
- Constante de amortiguamiento γ=1
g=1; %gamma
w0=16; %frecuencia propia
A0=@(wf) sqrt(w0^4+4*g^2*wf.^2)./sqrt((w0^2-wf.^2).^2+4*g^2*wf.^2);
fplot(A0,[0,20])
grid on
xlabel('\omega_f')
ylabel('A_0')
title('Amplitud')
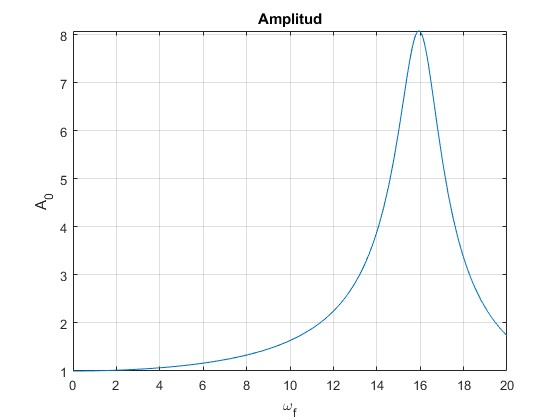
La amplitud tiene un valor máximo próximo a ω0 si γ es pequeño.
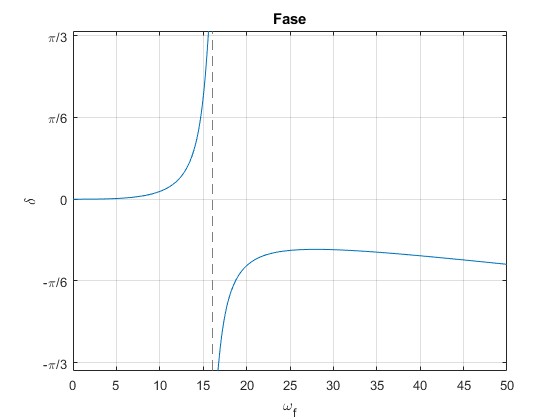
Representamos la fase δ en función de la frecuencia ωf de la fuerza oscilante.
g=1; %gamma
w0=16; %frecuencia propia
delta=@(wf) atan((2*g*wf.^3)./((w0^2-wf.^2)*w0^2+4*g^2*wf.^2));
fplot(delta,[0,50])
set(gca,'YTick',-pi/2:pi/6:pi/2)
set(gca,'YTickLabel',{'-\pi/2','-\pi/3', '-\pi/6','0','\pi/6','\pi/3','pi/2'})
grid on
xlabel('\omega_f')
ylabel('\delta')
title('Fase')
Energías
La energía almacenada en el muelle elástico
Teniendo en cuenta los valores medios de una función periódica. <sin2(ωft)>=1/2, <cos2(ωft)>=1/2, <sin(ωft)cos(ωft)>=0
Energía por unidad de tiempo (potencia) disipada por la fuerza de rozamiento (por unidad de masa)
Energía por unidad de tiempo (potencia) suministrada por la fuerza oscilante (por unidad de masa)
Comprobamos que en el estado estacionario, <P1>=<P2>
Calculamos el máximo de <P> utilizando Math Symbolic de MATLAB
>> syms x g w0; >> y=x^2*(w0^4+4*g^2*x^2)/((w0^2-x^2)^2+4*g^2*x^2); >> dy=diff(y,x); >> solve(dy,x) ans = 0 -((w0^5*(8*g^2 + w0^2)^(1/2) + 4*g^2*w0^4)/(- 16*g^4 + 8*g^2*w0^2 + w0^4))^(1/2) -(-(w0^5*(8*g^2 + w0^2)^(1/2) - 4*g^2*w0^4)/(- 16*g^4 + 8*g^2*w0^2 + w0^4))^(1/2) ((w0^5*(8*g^2 + w0^2)^(1/2) + 4*g^2*w0^4)/(- 16*g^4 + 8*g^2*w0^2 + w0^4))^(1/2) (-(w0^5*(8*g^2 + w0^2)^(1/2) - 4*g^2*w0^4)/(- 16*g^4 + 8*g^2*w0^2 + w0^4))^(1/2)
La raíz válida es
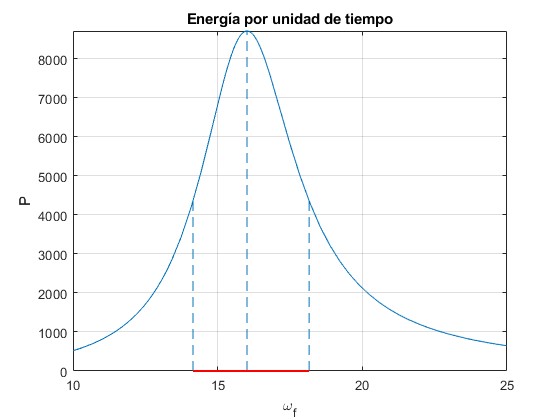
Representamos la energía por unidad de tiempo <P> en función de la frecuencia ωf de la fuerza oscilante para
- Frecuencia propia ω0=16
- Constante de amortiguamiento γ=2
Calculamos el intervalo de frecuencias para las cuales la potencia es superior a la mitad de la máxima <Pm>. Las dos raíces positivas de la ecuación bicuadrada
g=2; %gamma
w0=16; %frecuencia propia
P=@(wf) (g*wf.^2).*(w0^4+4*g^2*wf.^2)./((w0^2-wf.^2).^2+4*g^2*wf.^2);
wf_m=sqrt((w0^5*sqrt(8*g^2+w0^2)+4*g^2*w0^4)/(-16*g^4+8*g^2*w0^2+w0^4));
P_m=P(wf_m); %máximo
fplot(P,[10,25])
line([wf_m,wf_m],[0,P_m],'lineStyle','--')
a=P_m/(2*g)-4*g^2;
b=-(w0^4+P_m*(w0^2-2*g^2)/g);
c=P_m*w0^4/(2*g);
r1=(-b+sqrt(b^2-4*a*c))/(2*a);
r2=(-b-sqrt(b^2-4*a*c))/(2*a);
line([sqrt(r1),sqrt(r1)],[0,P_m/2],'lineStyle','--')
line([sqrt(r2),sqrt(r2)],[0,P_m/2],'lineStyle','--')
line([sqrt(r1),sqrt(r2)],[0,0],'lineWidth',1.5,'color','r')
grid on
xlabel('\omega_f')
ylabel('P')
title('Energía por unidad de tiempo')
Referencias
Kirk T. McDonald. Accelerating Through a Resonance on a “Washboard” Road. December, 2009