

El columpio (II)
En un modelo simplificado, el cuerpo del niño se sustituye por tres masas puntuales, m1, m2 y m3. La masa m3 dista l3 de la masa central m1 situada en el asiento y la masa m2 dista l2 de dicha partícula.
- l1 es la longitud de las cadenas que sujetan el asiento.
- φ es el ángulo que hacen las cadenas con la vertical
- θ es el ángulo que hace la línea que une las tres masas con las cadenas,
El niño oscila hacia delante y hacia atrás, sentado en el columpio, de modo que su posición angular en función del tiempo es θ=θ0·cos(ωt). θ0 es la amplitud y ω la frecuencia angular.
Ecuación del movimiento
Las ecuaciones de Lagrange es la forma más simple de obtener la ecuación del movimiento. Calculamos la Lagrangiana L=Ek-Ep del sistema en términos de la variable φ. Ek, es la energía cinética de las tres partículas y Ep su energía potencial. La ecuación del movimiento se obtiene.
Posición y velocidad de las partículas
Establecemos un sistema de referencia con el origen en el punto O, eje de sujección de las cadenas, el eje Y apuntando hacia abajo, el eje X hacia la derecha.
Posición de cada una de las tres masas
Derivando con respecto del tiempo, obtenemos las componentes rectangulares de las velocidades de las tres partículas
Energía cinética
Sumamos la energía cinética de las tres partículas
Energía potencial
Establecemos el nivel cero en el punto de suspensión O del columpio
Ecuación del movimiento
Calculamos las derivadas de la Lagrangiana L=Ek-Ep respecto de la velocidad angular dφ/dt y al ángulo φ
Agrupando términos, la ecuación diferencial se escribe
Donde
El niño oscila hacia delante y hacia atrás, sentado en el columpio, de modo que su posición angular en función del tiempo es θ=θ0·cos(ωt)
Se resuelve la ecuación diferencial por procedimientos numéricos, con las siguientes condiciones iniciales, en el instante t=0, φ=0, dφ/dt=0.
m1 = 40; %masa central
m2 = 40; %masa derecha
m3 = 20; %masa izquierda
L1 = 2.5; %longitud del péndulo
L2 = 0.4; %distancia entre m1 y m2
L3 = 0.4; %distancia entre m1 y m3
th0 = 0.7; %amplitud de la oscilación
w=1.9; %frecuencia angular
I1=(m1+m2+m3)*L1^2;
I2=m2*L2^2+m3*L3^2;
N=m3*L3-m2*L2;
I0=I1+I2-2*L1*N;
datos=[(m1+m2+m3), L1, I2, N, I0, th0, w];
x0=[0,0];
[t,x]=ode45(@ed_swing,[0,100],x0,[],datos);
plot(t,x(:,1))
grid on
xlabel('t')
ylabel('\theta');
title('Columpio')
function fg=ed_swing(t,x,p)
M=p(1);
L1=p(2);
I2=p(3);
N=p(4);
I0=p(5);
th0=p(6);
w=p(7);
theta=th0*cos(w*t);
d_theta=-w*th0*sin(w*t); %derivada
A=-2*L1*sin(theta)*N*d_theta/I0;
B=(N*9.8*sin(theta+x(1))-M*9.8*L1*sin(x(1)))/I0;
C=((I2-L1*N*cos(theta))*w*w*theta-L1*N*sin(theta)*d_theta*d_theta)/I0;
fg=[x(2); A*x(2)+B+C];
end
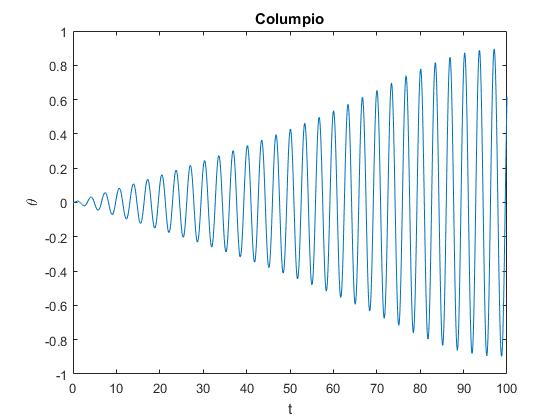
Los mismos datos, cambiando la frecuencia angular por la de un péndulo simple de longitud l1=2.5 (longitud de las cadenas que sujetan el asiento), ω=1.98
m1 = 40; %masa central m2 = 40; %masa derecha m3 = 20; %masa izquierda L1 = 2.5; %longitud del péndulo L2 = 0.4; %distancia entre m1 y m2 L3 = 0.4; %distancia entre m1 y m3 th0 = 0.7; %amplitud de la oscilación w=sqrt(9.8/L1); %frecuencia angular ......
Caso particular
Si se eligen adecuadamente las masas m2 y m3 y las distancias l2 y l3 de modo m2·l2=m3·l3, es decir, que el coeficiente N sea nulo, la ecuación diferencial se reduce significativamente
Para oscilaciones de pequeña amplitud, hacemos la aproximación sinφ≈φ
Se trata de un oscilador de frecuencia propia ω0 bajo la acción de una fuerza oscilante de amplitud F0 y frecuencia ω.
La solución particular de esta ecuación diferencial es de la forma C·cos(ωt). Calculamos el coeficiente C
La solución de la homogénea tiene la forma A·sin(ω0t)+B·cos(ω0t)
La solución general es de la forma θ= Asin(ω0t)+Bcos(ω0t)+Ccos(ωt). Los coeficientes A y B se determinan a partir de las condiciones iniciales: en el instante t=0, θ=0, dθ/dt=0
Consideremos la situación en la que la frecuencia de la fuerza oscilante se hace próxima a la frecuencia propia del oscilador ω≈ω0. Utilizando el resultado, sinx/x tiende hacia 1 cuando x tiende a cero
La amplitud de la oscilación crece linealmente con el tiempo t
En la figura se muestra el resultado para los siguientes datos:
m1 = 40; %masa central m2 = 40; %masa derecha m3 = 20; %masa izquierda L1 = 2.5; %longitud del péndulo L2 = 0.4; %distancia entre m1 y m2 L3 = 0.8; %distancia entre m1 y m3 th0 = 0.7; %amplitud de la oscilación w=1.905; %frecuencia angular .....
Se cumple que m2·l2=m3·l3
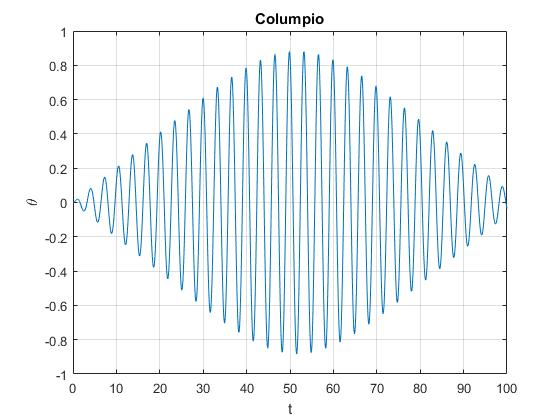
La amplitud va creciendo linealmente al principio. Luego, la amplitud se hace grande y la aproximación sinφ≈φ deja de tener validez
Actividades
Se introduce
- La frecuencia angular ω, en el control titulado Frecuencia angular
- La masa central m1, en el control titulado m1
- La masa m2, en el control titulado m2
- La masa m3, en el control titulado m3
- La distancia l2, en el control titulado l2
- La distancia l3, en el control titulado l3
- La distancia l1, la longitud de las cadenas que sujetan al asiento se ha fijado en 2.5
- La amplitud de la oscilación del niño θ0 sobre el asiento se ha fijado en 0.7 rad, 40°
Se pulsa el botón titulado Nuevo
Si se activa la casilla titulada Gráfica y se pulsa el botón titulado Nuevo, se verá la representación gráfica del ángulo φ que hace el columpio con la vertical en función del tiempo t. Para ver de nuevo el columpio en movimiento de desactiva esta casilla y se pulsa el botón titulado Nuevo.
Fijadas las masas m1, m2 y m3 y las distancias l1, l2 y l3, se tratará de investigar a qué frecuencias ω se obtiene una amplitud de φ grande.
Referencias
William B. Case, Mark A. Swanson. The pumping of a swing from the seated position. Am. J. Phys. 58 (5) May 1990, pp. 463-467
Johnathon Jackson. Analysis of The Motion of Pumping on A Swing, May 2004. http://msemac.redwoods.edu/~darnold/math55/deproj/sp04/jjackson/paperIIII.pdf