Oscilaciones amortiguadas y forzadas
Oscilaciones amortiguadas
Estudiamos la ecuación diferencial de segundo orden que describe el oscilador amortiguado, con las condiciones iniciales especificadas: en el instante t=0, la posición es es x0 y la velocidad es v0.
- ω0 es la frecuencia natural o propia del oscilador
- γ es la constante de amortiguamiento, γ<ω0
La transformada de Laplace de la ecuación diferencial es
Escribimos F(s) de modo que se pueda aplicar transformada inversa de Laplace,
Que es la misma solución que ya hemos obtenido anteriormente
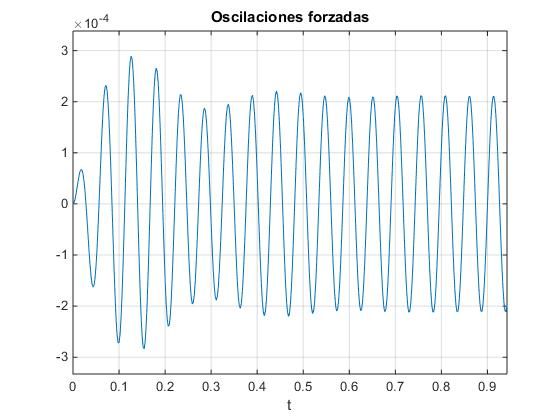
Calculamos la transformada inversa de Laplace con MATLAB y representamos la solución de la ecuación diferencial para ω0=100 rad/s, γ=7s-1, y las condiciones iniciales x0=5 y v0=0.
>> clear
>> syms g w0 s x0 v0;
>> Fs=(s*x0+2*g*x0+v0)/(s^2+2*g*s+w0^2);
>> x=ilaplace(Fs);
>> xx=subs(x,{g w0 x0 v0},{7 100 5 0});
>> ezplot(xx,[0 0.3*pi])
>> ylim([-5 5])
>> grid on
>> title('oscilaciones amortiguadas')
Oscilaciones forzadas
Estudiamos la ecuación diferencial de segundo orden que describe el oscilador forzado, con las condiciones iniciales especificadas.
- donde ω0 es la frecuencia natural o propia del oscilador
- ωf es la frecuencia angular de la fuerza oscilante de amplitud F
- γ es la constante de amortiguamiento, γ<ω0
Supondremos que la amplitud de la fuerza oscilante F/m=1 y que ω0≠ωf .
La transformada de Laplace de la ecuación diferencial es
Escribimos F(s) como suma de fracciones más simples.
Utilizamos MATLAB para resolver el sistema de cuatro ecuaciones con cuatro incógnitas. En el código MATLAB llamamos
- Coeficiente de rozamiento, γ (g),
- Frecuencia angular propia, ω0 (w0),
- Frecuencia angular de la fuerza oscilante, ωf (wf)
>> syms g w0 wf s;
>> A=[1 0 1 0; 2*g 1 0 1; w0^2 2*g wf^2 0; 0 w0^2 0 wf^2];
>> b=sym('[0;0;1;0]');
>> X=A\b
X =
(w0^2 - wf^2)/(4*g^2*wf^2 + w0^4 - 2*w0^2*wf^2 + wf^4)
(2*g*wf^2)/(4*g^2*wf^2 + w0^4 - 2*w0^2*wf^2 + wf^4)
-(w0^2 - wf^2)/(4*g^2*wf^2 + w0^4 - 2*w0^2*wf^2 + wf^4)
-(2*g*w0^2)/(4*g^2*wf^2 + w0^4 - 2*w0^2*wf^2 + wf^4)
Escribimos F(s) de modo que se pueda aplicar la transformada inversa de Laplace mirando directamente a la tabla de transformadas .
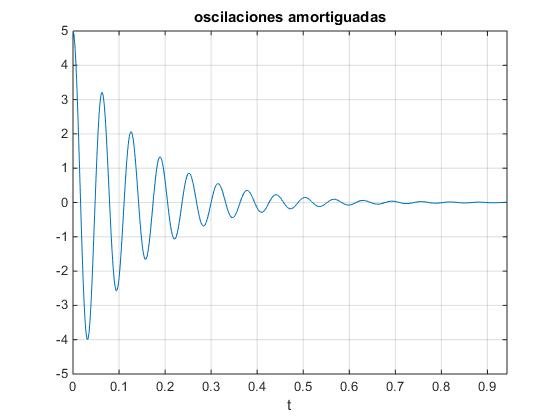
Los dos primeros términos describen el estado estacionario y los dos últimos el estado transitorio que desaparece al cabo de un tiempo teóricamente infinito al estar multiplicados por exp(-γt).
Calculamos la transformada inversa de Laplace con MATLAB y representamos la solución x de la ecuación diferencial para los valores γ=7, ω0=100 y ωf=120 y las condiciones iniciales x0=0 y v0=0.
>> syms g w0 wf s;
>> Fs=s/((s^2+wf^2)*(s^2+2*g*s+w0^2));
>> x=ilaplace(Fs);
>> xx=subs(x,{g w0 wf},{7 100 120});
>> ezplot(xx,[0 0.3*pi])