

Oscilaciones forzadas de un péndulo
Sea una varilla de masa m y de longitud 2l. Las coordendas del centro de suspensión son (x0, y0). Cuando el ángulo que forma la varilla con la vertical es θ, las coordenadas de su centro de masas son xc=x0+lsinθ, yc=y0+lcosθ
Sobre el péndulo actúan las siguientes fuerzas:
Una fuerza horizontal Fx en el centro de suspensión
Una fuerza vertical Fy aplicada en el centro de suspensión y el peso mg en el centro de masas
Aplicamos la segunda ley de Newton a los movimientos de traslación del centro de masas a lo largo del eje X y del eje Y
Aplicamos la ecuación de la dinámica de rotación alrededor de un eje perpendicular a la varilla y que pasa por el centro de masas. Se ha de tener en cuenta que los ángulos positivos se miden en el sentido de las agujas del reloj. El momento de Fy es positivo y el de Fx es negativo.
El momento de inercia de una varilla de longitud 2l es Ic=ml2/3. La ecuación de la dinámica de rotación se expresa de forma alternativa
De la relación entre las coordenadas del centro de masa con las del centro de suspensión y el desplazamiento angular del péndulo, tenemos
La ecuación del movimiento se escribe
Estudiamos ahora las tres situaciones
El centro de suspensión vibra verticalmente
El centro de suspensión vibra horizontalmente
El centro de suspensión se mueve en una circunferencia de radio A con velocidad angular ω
x0=0, y0=Acos(ωt)
y0=0, x0=Acos(ωt)
x0=Acos(ωt), y0=Asin(ωt)
El centro de suspensión vibra horizontalmente
Consideraremos dos casos:
El péndulo en posición casi invertida, el centro de masas por encima del de suspensión
El péndulo en posición normal, el centro de masas por debajo del centro de suspensión
En la aproximación de oscilaciones de pequeña amplitud, sinθ≈θ, cosθ≈1, la ecuación del movimiento se escribe
La solución de la ecuación diferencial homogénea es
La solución particular es
La introducimos en la ecuación diferencial para determinar el coeficiente E
La solución completa es la suma de la homogénea y de la particular
Los coeficientes a y b se determinan a partir de las condiciones iniciales
Para que las oscilaciones no crezcan exponencialmente con el tiempo, el coeficiente a deberá ser nulo, lo que implica que
Con esta relación entre las condiciones iniciales, el desplazamiento angular θ del péndulo con el tiempo t es
Al cabo de un cierto tiempo, el estado transitorio desaparece, la exponencial tiende a cero. El estado estacionario se caracteriza por la oscilación
En este caso, el ángulo φ=π-θ.
La ecuación del movimiento para las oscilaciones de pequeña amplitud sinφ≈θ, cosφ≈1
La solución de la ecuación diferencial homogénea es
La solución particular es
La introducimos en la ecuación diferencial para determinar el coeficiente E
La solución completa es la suma de la homogénea y de la particular
Los coeficientes a y b se determinan a partir de las condiciones iniciales
El desplazamiento angular φ del péndulo con el tiempo t es
Es la combinación lineal de dos movimientos armónicos de frecuencias ω y ω0.
Cuando ω se hace próxima a ω0 el último término crece y el sistema se vuelve inestable
Equilibrio y estabilidad
La ecuación del movimiento de una partícula de masa m unida a un muelle elástico de constante k es
La fuerza -kx es la derivada de la energía potencial Ep(x)=kx2/2 cambiada de signo
Para un péndulo simple, una partícula de masa m unida a una varilla rígida de longitud l y masa despreciable, la ecuación del movimiento es
La energía potencial es Ep(θ)=-mglcosθ.
Consideremos el movimiento de una partícula sometida a la acción simultánea de un campo, independiente del tiempo, de energía potencial Ep(x) y de una fuerza que depende de la posición x y del tiempo t de la forma, f(x,t)=f1(x)·sin(ωt)+f2(x)·cos(ωt)
La fuerza f(x,t) varía con el tiempo con una frecuencia elevada ω. Se entiende frecuencia elevada una frecuencia ω>>ω0, donde ω0 es la frecuencia natural del movimiento de la partícula bajo la acción únicamente de la fuerza descrita por la energía potencial Ep(x). La ecuación del movimiento de la partícula es
La partícula se moverá a lo largo de la trayectoria descrita por el campo y realizará pequeñas oscilaciones de frecuencia ω alrededor de esta trayectoria. Por tanto, la solución de esta ecuación diferencial es la suma de dos términos
donde ξ(t) corresponde a estas pequeñas oscilaciones. El resultado final, es que la partícula se mueve en un potencial efectivo. Véase el libro Mecánica de Landau
El centro de suspensión vibra horizontalmente
Consideremos una partícula de masa m unida a una varilla rígida de longitud l y masa despreciable. El momento de inercia respecto del eje que pasa por el centro de suspensión es Ic+ml2=ml2. La ecuación del movimiento
El primer término es la derivada cambiada de signo de la función ep(θ)=(g/l)cosθ
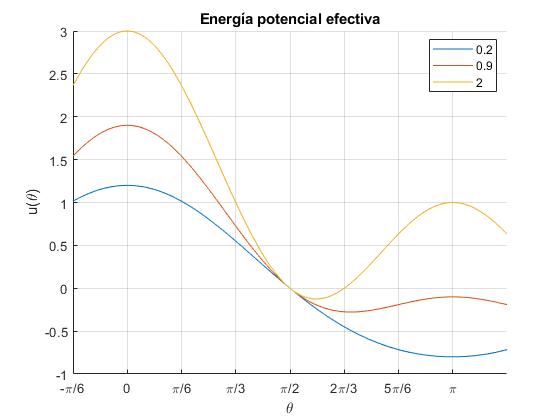
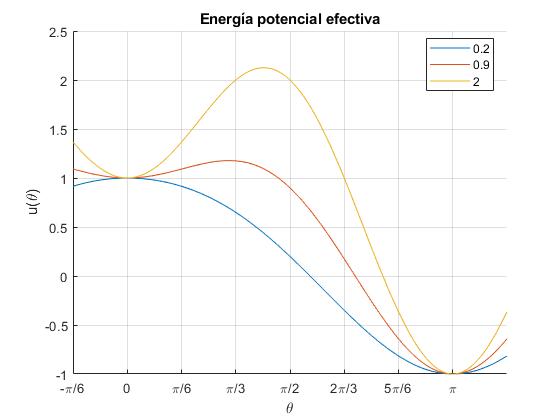
El potencial efectivo es
Para determinar las posiciones θ de equilibrio (estable o inestable), calculamos la derivada
La energía potencial efectiva es una curva simétrica, por lo que representamos la función u(θ) para tres valores del parámetro k=0.2,0.9 y 2, en el intervalo -30°<θ<210°
hold on
for k=[0.2,0.9,2]
f=@(x) cos(x)+k*cos(x).^2;
fplot(f,[-pi/6,pi+pi/6],'displayName',num2str(k))
end
hold off
grid on
xlabel('\theta')
legend('-DynamicLegend','location','best')
set(gca,'XTick',-pi/6:pi/6:pi)
set(gca,'XTickLabel',{'-\pi/6','0','\pi/6','\pi/3','\pi/2','2\pi/3',
'5\pi/6','\pi'})
ylabel('u(\theta)')
xlim([-pi/6,pi+pi/6])
title('Energía potencial efectiva')
Estabilidad
Para k<1/2, la posición de equilibrio estable es θ=π. Para k>1/2, la posición de equilibrio estable es θ=arcos(-1/2·k). La posición θ=0 es de equilibrio inestable
Examinamos el signo de la derivada segunda de u(θ)
- positivo, mínimo, equilibrio estable
- negativo, máximo, equilibrio inestable
El centro de suspensión vibra verticalmente
La ecuación del movimiento es
El potencial efectivo es
Para determinar las posiciones θ de equilibrio (estable o inestable), calculamos la derivada
Representamos la función u(θ) para tres valores del parámetro k=0.2,0.9 y 2, en el intervalo -30°<θ<210°
hold on
for k=[0.2,0.9,2]
f=@(x) cos(x)+k*sin(x).^2;
fplot(f,[-pi/6,pi+pi/6],'displayName',num2str(k))
end
hold off
grid on
xlabel('\theta')
legend('-DynamicLegend','location','best')
set(gca,'XTick',-pi/6:pi/6:pi)
set(gca,'XTickLabel',{'-\pi/6','0','\pi/6','\pi/3','\pi/2','2\pi/3',
'5\pi/6','\pi'})
ylabel('u(\theta)')
xlim([-pi/6,pi+pi/6])
title('Energía potencial efectiva')
Estabilidad
La posición de equilibrio estable es θ=π. Para k>1/2, θ=0 es también posición de equilibrio estable. La posición θ=arcos(1/2·k) con k>1/2 es de equilibrio inestable
Examinamos el signo de la derivada segunda de u(θ)
El centro de suspensión vibra horizontalmente
Supongamos un péndulo formado por una varilla inextensible y sin peso de longitud l, en cuyo extremo hay una partícula de masa m. El centro de suspensión describe un Movimiento Armónico Simple a lo largo del eje horizontal X con amplitud A y frecuencia angular ω, z(t)=Acos(ωt). Vamos a estudiar las oscilaciones forzadas de este sistema oscilante.
Establecemos un origen y unos ejes X e Y como se muestra en la figura. La posición de la partícula de masa m es
Derivando respecto del tiempo, obtenemos las componentes de la velocidad
La energía cinética es
La energía potencial de la masa m es mgy=-mglcosθ
La lagrangiana L=T-V es
Ecuación del movimiento
Se obtiene la ecuación diferencial del movimiento
Donde es la frecuencia natural de las oscilaciones del péndulo. Si además, suponemos que actúa una fuerza de rozamiento proporcional a la velocidad dθ/dt, añadimos, como en las oscilaciones amortiguadas, el término 2γ·dθ/dt
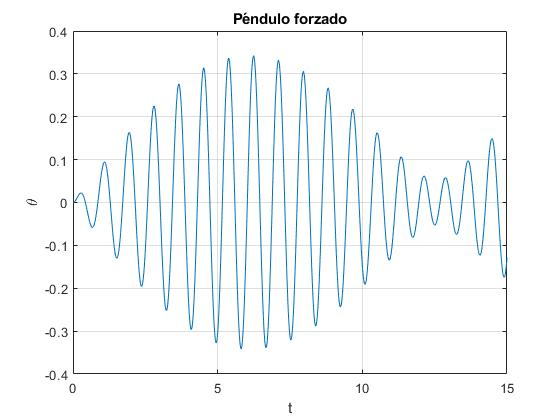
Resolveremos la ecuación diferencial por el procedimiento numérico
- Longitud del péndulo, l=0.195 m
- Amplitud de la oscilación del centro de suspensión del péndulo, A= 4.5 mm
- Constante de amortiguamiento, γ=0.025 s-1
A=0.0045; %amplitud de la oscilación del centro de suspensión
gamma=0.025; %amortiguamiento
L=0.195; %longitud del péndulo
w0=sqrt(9.8/L); %frecuencia natural
w=6.28; %frecuencia de oscilación del centro de suspensión
fg=@(t,x)[x(2);A*w^2*cos(w*t)*cos(x(1))/L-w0^2*sin(x(1))-2*gamma*x(2)];
[t,x]=ode45(fg,[0,15],[0,0]);
plot(t, x(:,1))
grid on
xlabel('t')
ylabel('\theta')
title('Péndulo forzado')
>> w0 w0 = 7.0892
Frecuencias ω de oscilación del centro de suspensión
- ω=6.28 rad/s
- ω=6.91 rad/s
- ω=7.54 rad/s
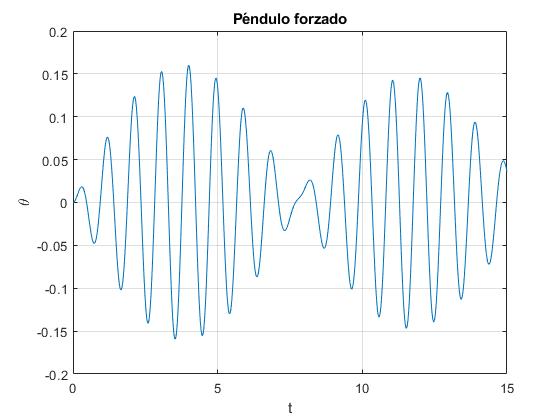
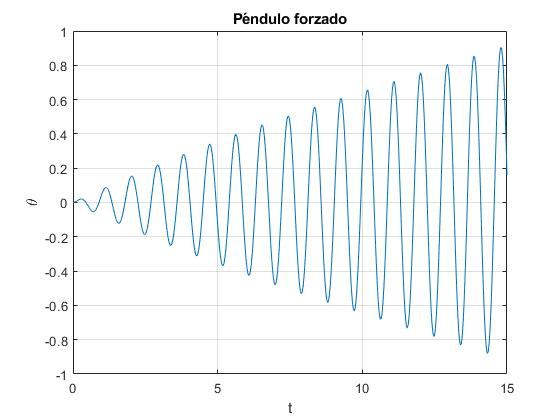
El estado estacionario, (amplitud constante) se alcanza después de un tiempo teóricamente infinito
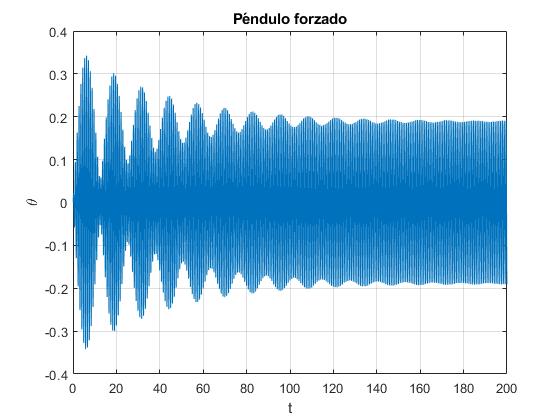
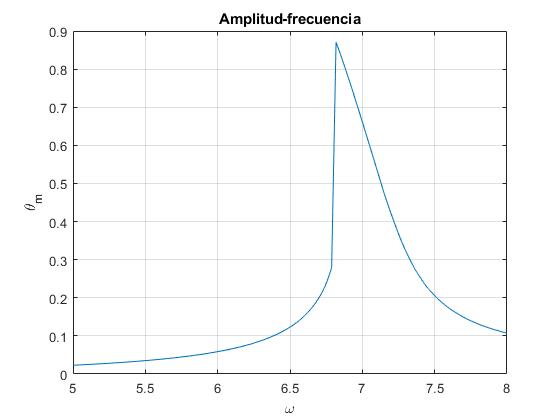
Representamos la amplitud en el estado estacionario, en función de la frecuencia en el intervalo 5<ω<8 rad/s
A=0.0045; %amplitud de la oscilación del centro de suspensión
gamma=0.025; %amortiguamiento
L=0.195; %longitud del péndulo
w0=sqrt(9.8/L); %frecuencia natural
ww=linspace(5,8,100);
th_max=zeros(1,length(ww));
i=1;
for w=ww
fg=@(t,x)[x(2);A*w^2*cos(w*t)*cos(x(1))/L-w0^2*sin(x(1))-2*gamma*x(2)];
[t,x]=ode45(fg,[0,200],[0,0]);
amp=abs(x(:,1)).*(t>190); %amplitud casi constante
th_max(i)=max(amp);
i=i+1;
end
plot(ww, th_max)
grid on
xlabel('\omega')
ylabel('\theta_m')
title('Amplitud-frecuencia')
Utilizamos
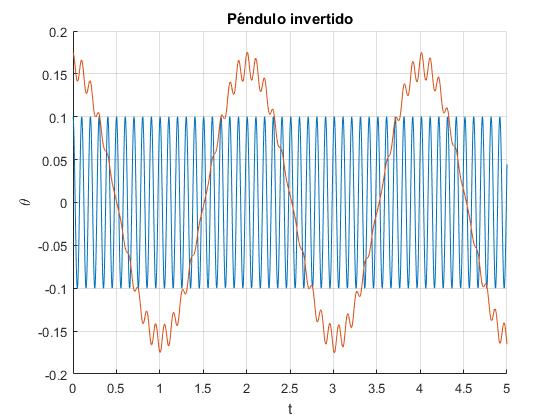
El péndulo invertido
Supongamos un péndulo formado por una varilla inextensible y sin peso de longitud l, en cuyo extremo hay una partícula de masa m. El centro de suspensión describe un Movimiento Armónico Simple a lo largo del eje vertical Y con amplitud A y frecuencia angular ω, z(t)=Acos(ωt). Vamos a estudiar las oscilaciones forzadas de este sistema oscilante.
Establecemos un origen y unos ejes X e Y como se muestra en la figura. La posición de la partícula de masa m es
Derivando respecto del tiempo, obtenemos las componentes de la velocidad
La energía cinética es
La energía potencial de la masa m es mgy
La lagrangiana L=T-V es
Ecuación del movimiento
Para resolver la ecuación diferencial por procedimientos numéricos, despejamos la aceleración
Donde es la frecuencia natural de las oscilaciones del péndulo. Resolvemos la ecuación diferencial con las siguientes condiciones iniciales t=0, θ=θ0, dθ/dt=0
Representamos la oscilación θ(t) del péndulo y la oscilación del soporte, Acos(ωt) para una frecuencia angular ω grande en comparación con la frecuencia natural ω0=3.13 rad/s para un péndulo de longitud l=1 m.
A=0.1; %amplitud de la oscilación del centro de suspensión
L=1; %longitud del péndulo
w0=sqrt(9.8/L); %frecuencia natural
w=20*w0;%frecuencia de oscilación del centro de suspensión
x0=[10*pi/180,0]; %condiciones iniciales, 10 grados
tspan=[0,5];
% x(1)=theta, x(2)=dtheta/dt,
fg=@(t,x)[x(2);(-A*w^2*cos(w*t)/L+w0^2)*sin(x(1))];
[t,x]=ode45(fg,tspan,x0);
hold on
fplot(@(t) A*cos(w*t),tspan)
plot(t, x(:,1))
hold off
grid on
xlabel('t')
ylabel('\theta')
title('Péndulo invertido')
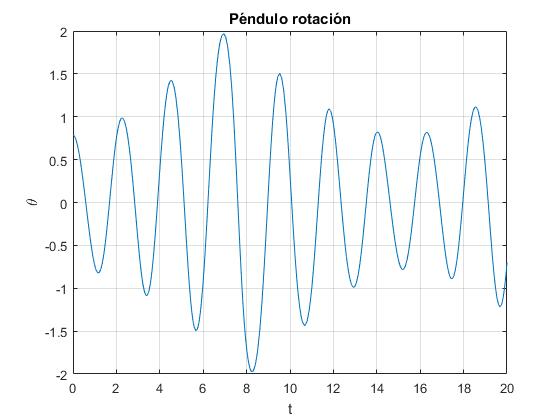
El centro de suspensión describe un movimiento circular
Supongamos un péndulo formado por una varilla inextensible y sin peso de longitud l, en cuyo extremo hay una partícula de masa m. El centro de suspensión describe un movimiento circular uniforme de radio A y con velocidad angular ω. Vamos a estudiar las oscilaciones forzadas de este sistema oscilante.
Establecemos un origen y unos ejes X e Y como se muestra en la figura. En un instante dado t la posición angular del centro de suspensión es ωt y el péndulo se ha desviado θ de la vertical.
La posición de la partícula de masa m es
Derivando respecto del tiempo, obtenemos las componentes de la velocidad
La energía cinética es
La energía potencial de la masa m es mgy
La lagrangiana L=T-V es
Ecuación del movimiento
Para resolver la ecuación diferencial por procedimientos numéricos, despejamos la aceleración
Donde es la frecuencia natural de las oscilaciones del péndulo. Resolvemos la ecuación diferencial con las siguientes condiciones iniciales t=0, θ=θ0, dθ/dt=0
Representamos la posición angular θ del péndulo en función del tiempo t para una velocidad angular de rotación ω próxima a la frecuencia natural ω0=3.1 rad/s para un péndulo de longitud l=1 m
L=1; %longitud del péndulo
w0=sqrt(9.8/L); %frecuencia natural
R=0.15; %radio de la circunferencia
w=3.1; %velocidad angular de rotación
%condiciones iniciales
x0=[pi/4,0]; %condiciones iniciales
tspan=[0,20];
% x(1)=theta, x(2)=dtheta/dt,
fg=@(t,x)[x(2); R*w^2*cos(x(1)-w*t)/L-w0^2*sin(x(1))];
[t,x]=ode45(fg,tspan,x0);
plot(t,x(:,1))
grid on
xlabel('t')
ylabel('\theta')
title('Péndulo rotación')
Actividades
En primer lugar, especificamos los parámetros del sistema
- La velocidad angular de rotación del centro de suspensión del péndulo, el control titulado Velocidad angular
- La longitud del péndulo, se ha fijado en l=0.5
- El radio de la circunferencia que describe el centro de suspensión del péndulo, se ha fijado en A=0.15
En segundo lugar, especificamos las condiciones iniciales
- La desviación inicial θ0 del péndulo en grados, en el control titulado Angulo inicial
- La velocidad inicial de la partícula a lo largo de la dirección tangencial se ha fijado en dθ/dt=0
Si queremos ver la gráfica de la posición angular θ del péndulo, activamos la casilla titulada Gráfica
Referencias
Leon Blitzer. Inverted pendulum. Am. J. Phys. 33 (1965), pp. 1076–1078
Landau, Lifshitz. Mecánica. Volumen I. Segunda Edición, Editorial Reverté, 1970, págs. 112-114
Rod Cross. Observations of a driven pendulum at low amplitudes. Eur. J. Phys. 42 (2021) 055001