

El columpio (I)
El columpio se utiliza de dos formas distintas:
-
Un niño está sentado en la tabla, una persona le empuja periódicamente y en fase con su movimiento para incrementar o mantener la amplitud de las oscilaciones del columpio.
-
Un niño que está montado en un columpio, en posición vertical sobre la tabla, mueve su cuerpo para lograr que la amplitud de la oscilación aumente.
Para explicar cualitativamente el funcionamiento de este columpio autopropulsado, supondremos que el centro de masas del niño repentinamente sube o baja en ciertas posiciones de la oscilación.
Se efectuará un análisis simplificado, en el que se considera al niño como una masa puntual situada en su centro de masas, que puede subir o bajar su c.m. una longitud δ mediante la acción de las fuerzas interiores. Se despreciará también el rozamiento del aire y en el eje del columpio.
Etapas del movimiento
En este apartado, haremos un análisis detallado de cada una de las etapas de un ciclo de las oscilaciones del columpio.
Primera etapa
El columpio sale de la posición θ0 con velocidad angular inicial nula ω=0. Llega a la posición de equilibrio θ=0, con una velocidad angular ω1, que se calcula aplicando el principio de conservación de la energía.
donde md2 es el momento de inercia de una masa puntual m que dista d del eje de rotación O.
La energía total inicial es E1=mgd(1-cosθ0)
Segunda etapa
Cuando el columpio alcanza la posición de equilibrio θ=0, el niño sube su centro de masas (c.m.) una distancia δ. En ese preciso instante, el momento de las fuerzas que actúa sobre el columpio es cero (todas las fuerzas pasan por el origen O), el momento angular permanece constante.
-
El momento angular inicial es md2·ω1
-
El momento angular final es m(d-δ)2·ω2
La velocidad angular final ω2 aumenta al disminuir la distancia al eje de rotación.
La energía total es
Balance energético
Calculamos en la posición de equilibrio θ=0, la energía inicial, la final y el trabajo que ejercen las fuerzas interiores para subir una altura δ el centro de masas del niño.
La energía inicial es
La energía final es
Para que el niño suba la posición de su centro de masas δ, ha de realizar un trabajo. Calculamos la fuerza F que han de ejercer sus músculos para que su c.m. describa un arco de circunferencia de radio x, aplicando la Dinámica del movimiento circular uniforme (fuerza=masa × aceleración normal)
F-mg=mω2x.
La constancia del momento angular en la posición de equilibrio θ=0 nos proporciona el valor de la velocidad angular ω cuando el c.m. está a una distancia x del eje de rotación O
md2·ω1= mx2·ω
La fuerza F tiene el mismo sentido que el desplazamiento, el trabajo es positivo
Tercera etapa
Tenemos ahora la situación opuesta a la primera etapa, el columpio con una velocidad angular inicial ω2 en la posición θ=0, alcanza un máximo desplazamiento angular θ1. Aplicando el principio de conservación de la energía
El ángulo máximo θ1 que se desvía el columpio es, combinado las expresiones anteriores
como d>(d-δ) resulta que θ1>θ0
La energía total es
E2=mg(d-δ)(1-cosθ1)+mgδ=mgd(1-cosθ1)+mgδcosθ1
Cuarta etapa
En la posición angular de desviación máxima θ1, la velocidad angular ω=0. El niño baja la posición de su centro de masas en δ.
El único cambio que experimenta el sistema es una disminución de la energía potencial a cuenta del trabajo de las fuerzas internas. Poniendo en el eje O en nivel cero de la energía potencial.
ΔEp=-mgdcosθ1+mg(d-δ)cosθ1= -mgδcosθ1
La energía total es
E3=mgd(1-cosθ1)
Quinta etapa
Es similar a la primera etapa, el columpio se mueve hacia la posición de equilibrio estable θ=0, que alcanza con una velocidad angular ω3. Aplicando el principio de conservación de la energía
La energía total es E3
Sexta etapa
La sexta etapa es similar a la segunda etapa. En la posición de equilibrio estable, el centro de masas sube una altura δ. La velocidad angular se incrementa de nuevo de ω3 a ω4. La constancia del momento angular en la posición de equilibrio estable θ=0, nos proporciona el valor de la velocidad angular final ω4.
La energía total es
Séptima etapa
La séptima etapa es similar a la tercera etapa. El columpio parte de la posición de equilibrio estable θ=0, con una velocidad angular inicial ω4, alcanzando un desplazamiento máximo θ2 que se obtiene aplicando el principio de conservación de la energía
Como ω4> ω3 el máximo desplazamiento θ2 > θ1
Relacionamos ambos desplazamientos mediante la fórmula
La energía total es
E4=mg(d-δ)(1-cosθ2)+mgδ=mgd(1-cosθ2)+mgδcosθ2
Octava etapa
En la posición de máximo desplazamiento θ2, ω=0, el centro de masa baja δ, con lo que se completa el primer ciclo de las oscilaciones del columpio.
La energía total es
E5=mgd(1-cosθ2)
Ecuaciones del movimiento del columpio entre las posiciones media y extremas
La ecuación del movimiento del columpio entre la posiciones extremas θi (i=0, 1, 2,3..) y la posición de equilibrio estable θ=0, es la misma que la de un péndulo de longitud l=d, l=d-δ, dependiendo de la distancia entre el c.m. y el eje O del columpio.
El momento angular de una partícula de masa m respecto del origen O es el producto del momento de inercia ml2 por la velocidad angular ω, L=ml2·ω
El momento M de las fuerzas que actúan sobre la partícula respecto del origen O es
M=-mglsinθ
La ecuación del movimiento es dL/dt=M se escribe en forma de ecuación diferencial
Se resuelve mediante procedimientos numéricos, con las condiciones iniciales que dependen de cada etapa del movimiento:
- en la primera etapa, l=d, θ=θ0, dθ/dt=0
- en la tercera etapa, l=d-δ, θ=0, dθ/dt=ω2
- en la quinta etapa, l=d, θ=θ1, dθ/dt=0
- en la séptima etapa,l=d-δ, θ=0, dθ/dt=ω4
- y así sucesivamente...
Resumiendo
-
El columpio debe de estar desplazado inicialmente un ángulo θ0>0, para que pueda funcionar el mecanismo descrito en esta página.
-
El c.m. del niño sube y baja de forma instantánea por la acción de las fuerzas internas, en la posición de equilibrio y en las posiciones de máximo desplazamiento.
-
Mediante el mecanismo que se ha descrito, el trabajo de las fuerzas internas (acción de los músculos) se invierte en incrementar el máximo desplazamiento del columpio de modo que θ0<θ1<θ2<θ3<… Teóricamente, el columpio puede llegar a dar una vuelta completa.
-
La energía total al finalizar la segunda oscilación vale
En el primer ciclo completo, el desplazamiento máximo θ2 vale
Si el centro de masas se eleva y desciende una altura δ pequeña comparada con la longitud d del columpio
En el segundo ciclo
y así, sucesivamente.
donde E0 es la energía inicial del columpio. Después de n oscilaciones
La energía crece exponencialmente independientemente de la masa del niño y depende solamente del desplazamiento relativo δ/d del c.m. del niño en las posiciones extremas y en el medio de la oscilación.
Ejemplo
- El desplazamiento angular inicial θ0=10º
- El desplazamiento del c.m. δ=6 cm=0.06 m
- La distancia inicial d=1.0 entre le c.m. y eje de rotación O.
En la figura se muestra un ciclo completo de operación del columpio
1.-La energía inicial es E1=mgd(1-cosθ0)=m·9.8·1.0·(1-cos10º)=0.15·m
2.-Se aplica el principio de conservación de la energía. La velocidad angular ω1 en la posición de equilibrio es
La energía E2=E1
3.-El centro de masa asciende, se conserva el momento angular
md2·ω1=m(d-δ)2·ω2, ω2 =0.62 rad/s
La energía total es
4.-La energía cinética se convierte en energía potencial, el columpio se desvía un ángulo θ1
La energía E4=E3
5.-El centro de masas desciende, la energía total es
E5=m9.8·1(1-cos11º)=0.18·m
6.-Se aplica el principio de conservación de la energía. La velocidad angular ω3 en la posición de equilibrio es
La energía E6=E5
7.-El centro de masa asciende, se conserva el momento angular
md2·ω3=m(d-δ)2·ω4, ω4 =0.68 rad/s
La energía total es
8.-La energía cinética se convierte en energía potencial, el columpio se desvía un ángulo θ2
La energía E8=E7
9.-El centro de masas desciende, la energía total es
E9=m9.8·1(1-cos12º)=0.22·m
10.-Comienza un nuevo ciclo.
Los desplazamientos máximos se pueden calcular mediante las fórmulas
Aplicamos la misma fórmula para calcular el desplazamiento máximo θ2, conocido θ1.
y así sucesivamente...
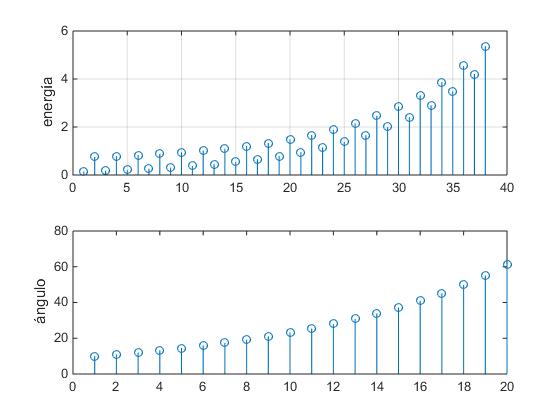
clear
fi=10*pi/180; %ángulo inicial de partida
delta=0.06; %desplazamiento del c.m.
d=1; %longitud del columpio
e=zeros(0,40);
angulo=zeros(0,20);
E=9.8*d*(1-cos(fi)); %energía inicial
e(1)=E;
angulo(1)=fi*180/pi;
for i=1:20
E=E*(d/(d-delta))^2+9.8*delta; %energía al pasar por la posición fi=0
e(2*i)=E;
fi=2*asin((d/(d-delta))^(3/2)*sin(fi/2)) %desplazamiento angular máximo
angulo(i+1)=fi*180/pi;
if fi>pi/3 %no supera los 60º
break
end
E=9.8*d*(1-cos(fi)); %energía final en los extremos
e(2*i+1)=E;
end
subplot(2,1,1)
stem(e)
grid on
ylabel('energía')
subplot(2,1,2)
stem(angulo)
ylabel('ángulo')
Actividades
Se introduce
-
El desplazamiento angular inicial θ0>0, un ángulo en grados en el control titulado Angulo inicial
-
El desplazamiento δ del centro de masas, en cm, en el control titulado Desplazamiento.
-
La distancia inicial del c.m. al eje de rotación O se ha fijado en d=1.0 m.
Se pulsa el botón titulado Nuevo
Se observa el movimiento del columpio, y el cambio de posición del c.m. del niño representado por un punto de color rojo, cuando el columpio pasa por las posiciones de máximo desplazamiento ω=0, por la posición de equilibrio estable θ=0.
En la parte derecha, se muestra la energía total del columpio. El nivel cero de energía potencial se ha establecido en la parte más baja de la trayectoria del c.m, es decir, en la posición del c.m. cuando el columpio está en equilibrio θ0=0. Observamos dónde cambia la energía total, dónde se conserva, transformándose la energía potencial en cinética y viceversa.
Cuando el columpio se desvía un ángulo mayor que 60º, se detiene
Péndulo de longitud variable
Hemos supuesto que el centro de masas del niño se eleva δ en la posición θ=0, (la longitud del péndulo pasa de d a d-δ) y desciende en los extremos θ0 de la oscilación, (la longitud del péndulo pasa de d-δ a d) en un tiempo muy corto comparado con el periodo T0 de la oscilación que supondremos constante e independiente de la amplitud θ0
En este apartado, supondremos el tiempo que tarda el centro de masas del niño en elevarse o descender es T0/4. En la figura, en color rojo, se muestra la longitud l=d-f(t) del péndulo en función del tiempo
Hacemos un análisis de Fourier de la función periódica
Siendo P=T0/4. Dado que f(t) es una función par, los coeficientes bk=0
Hacemos una integración por partes
El resultado es
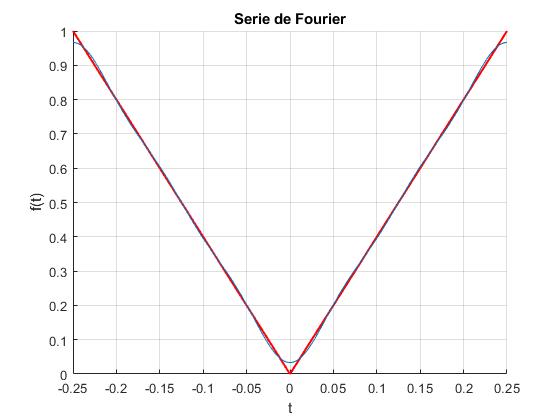
Utilizamos MATLAB para calcular los coeficientes ak y bk y aproximar la función f(t) a un número finito de términos 1, 3 y 5
syms t;
N=5; %términos del desarrollo en serie
T0=1;
P=T0/4;
d=1;
%definición de la fuerza y su semiperiodo P
f=@(t) (-d*t/P)*(heaviside(t+P)-heaviside(t))+(d*t/P)*(heaviside(t)-heaviside(t-P));
a = @(k) int(f*cos(k*pi*t/P),t,-P,P)/P;
b = @(k) int(f*sin(k*pi*t/P),t,-P,P)/P;
fs=a(0)/2;
for k=1:N %número de términos
fs=fs+a(k)*cos(k*pi*t/P)+b(k)*sin(k*pi*t/P);
end
hold on
line([-T0/4,0],[d,0],'lineWidth',1.5, 'color','r')
line([0,T0/4],[0,d],'lineWidth',1.5, 'color','r')
fplot(fs,[-T0/4,T0/4]);
hold off
grid on
xlabel('t')
ylabel('f(t)')
title('Serie de Fourier')
Añadimos estas líneas de código para representar los coeficientes ak y bk
...
figure
k=1:N;
ak=a(k);
bk=b(k);
subplot(2,1,1)
stem(ak)
grid on
xlabel('k');
ylabel('a(k)')
subplot(2,1,2)
stem(bk)
grid on
xlabel('k');
ylabel('b(k)')
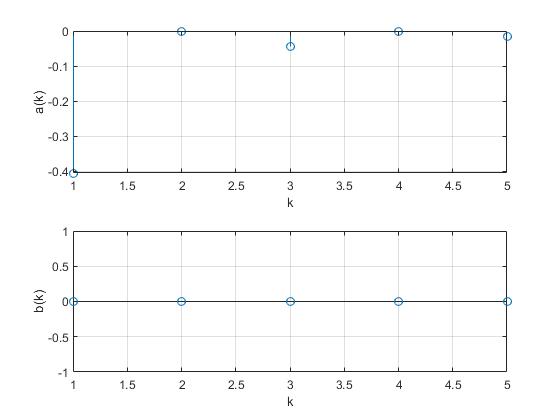
Observamos que los coeficientes bk son nulos ya que la función f(t) tiene simetría par, son también nulos los coeficientes pares a2, a4, .... El coeficiente más importante es a1, los otros a3, a5... son comparativamente mucho más pequeños. La función f(t) se puede describir aproximadamente con el coeficiente a0 y el primer término de la serie, tal como se muestra en esta figura
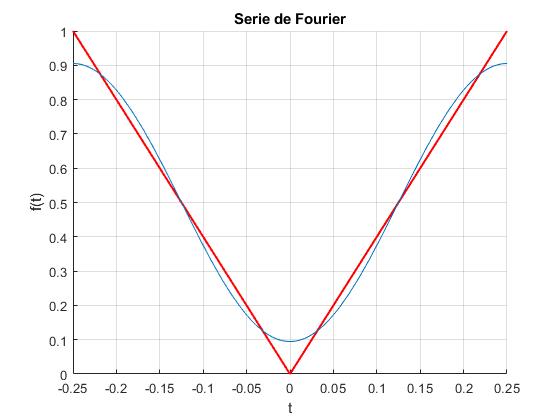
Con esta aproximación, la longitud l del péndulo es una función del tiempo de la forma
La ecuación diferencial del movimiento del péndulo se escribe
Cuando la frecuencia de ω(t) es aproximadamente del doble de ω0 se produce una resonancia paramétrica. En el caso de que el rozamiento sea despreciable, la amplitud crece exponencialmente con el tiempo. Una situación similar se estudia en la página titulada 'péndulo elástico'
Referencias
Tea P., Falk H. Pumping on a swing. Am. J. Phys. 36 (1968) 1165-1166
Para el apartado titulado 'Péndulo de longitud variable'
Bejo Duka, Raimonda Duka. On the elastic pendulum, parametric resonance and 'pumping' swings. Eur. J. Phys. 40 (2019), 025005