

Respuesta de un oscilador a una fuerza impulsiva (I)
Vamos a estudiar ahora el comportamiento de un oscilador forzado bajo la acción de una fuerza F(t).
Aplicamos la segunda ley de Newton a este sistema
ma=-λv-kx+F(t)
Que escribimos en forma de ecuación diferencial general, con las siguientes condiciones iniciales: posición inicial x0 y velocidad inicial v0 en el instante t=0
- ω0 es la frecuencia natural o propia del oscilador
- γ es la constante de amortiguamiento, γ<ω0
Aplicamos la transformada de Laplace a la ecuación diferencial
g(s) es la transformada de Laplace de la función f(t)
La transformada inversa de Laplace x(t)=x1(t)+x2(t) es la suma de dos términos, el primero es el debido a la fuerza y no depende de las condiciones iniciales y el segundo depende de los valores de la posición inicial x0 y velocidad inicial v0 en el instante t=0.
Como hemos visto en la página anterior: oscilaciones amortiguadas, la transformada inversa de Laplace del segundo término x2(t) es
Quedaría por determinar la transformada inversa de Laplace del primer término que dependerá de la función g(s) particular, es decir, de la fuerza aplicada a la partícula en función del tiempo t, F(t).
Pulso delta de Dirac
Un impulso es una fuerza F(t) actuando durante un tiempo Δt. Por ejemplo, un golpe de un martillo, el choque de un objeto contra otro fijo, la presión de los gases de una explosión, etc.
Se define impulso como el área sombreada bajo la curva F(t), o la integral
El impulso unidad o la función delta de Dirac se define
La fuerza es nula excepto en las proximidades de t=a. El valor de la fuerza es muy grande en ese instante.
Un impulso I0 que puede representar una fuerza muy grande actuando durante un intervalo muy corto de tiempo se puede escribir.
La transformada de Laplace g(s) es, véase la tabla de transformadas de Laplace
Se procede a calcular la transformada inversa de Laplace de modo similar al del oscilador amortiguado, ya que solamente se añade el término constante I0/m, por lo que la acción del impulso es proporcionar al móvil una velocidad inicial adicional I0/m, tal como vemos a continuación.
Para el caso de que las condiciones iniciales sean: posición inicial x0=0 y velocidad inicial v0=0 en el instante t=0.
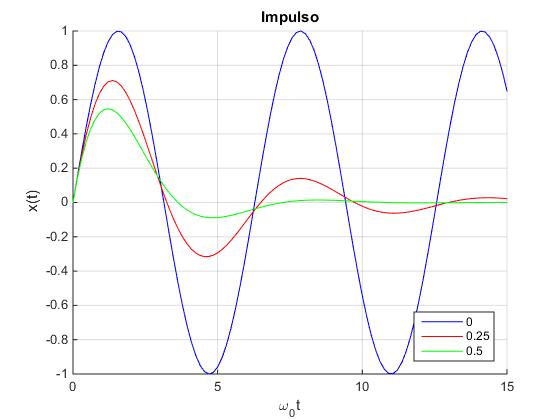
Vamos a representar la función x(t) en función de ω0t para varios valores del coeficiente de rozamiento γ=ω0·g. Escribimos la función x(t) de forma apropiada
r=[0 0.25 0.5]; %rozamiento ξ
col=['b' 'r' 'g']; %colores
t=linspace(0,15,100); %w0·t en el eje horizontal
hold on
i=0;
for g=r
i=i+1;
x=exp(-g*t).*(sin(sqrt(1-g^2)*t))/sqrt(1-g^2);
plot(t,x,col(i),'displayName',num2str(r(i)))
end
title('Impulso')
xlabel('\omega_0t')
ylabel('x(t)')
legend('-DynamicLegend','location','Southeast')
grid on
hold off
Función escalón
Supongamos ahora, que la fuerza adopta la forma de la función escalón
Resolvemos la ecución diferencial
Integración de la ecuación diferencial
La solución particular es
La solución completa es la suma de la homogénea más la particular
Los coeficientes A y B se determinan a partir de las condiciones iniciales: posición inicial x0=0 y velocidad inicial v0=0 en el instante t=0.
Para el caso de que las condiciones iniciales sean: posición inicial x0=0 y velocidad inicial v0=0 en el instante t=0.
Vamos a representar la función x(t) en función de ω0t para un valor del coeficiente de rozamiento γ=ω0·g. Escribimos la función x(t) de forma apropiada
g=0.25;
t=linspace(0,15,100); %w0·t en el eje horizontal
w=sqrt(1-g^2);
x=1-exp(-g*t).*(g*sin(w*t)/w+cos(w*t));
plot(t,x,'r')
title('Escalón')
xlabel('\omega_0t')
ylabel('x(t)')
grid on
[xmax nmax]=max(abs(x));
fprintf('El máximo valor del desplazamiento es %1.5f
en el instante %1.5f\n',xmax,t(nmax))
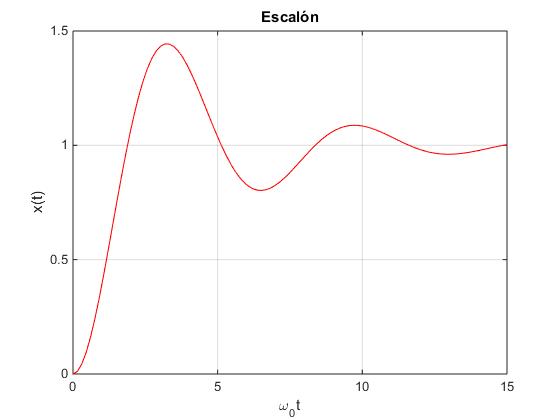
El máximo valor del desplazamiento es 1.44346 en el instante 3.18182
La función presenta un máximo pronunciado para tp=π/ω, que obtenemos derivando x(t) e igualando a cero.
Por otra parte, la función x(t) tiende asintóticamente al valor
El primer máximo sobrepasa el valor final de x(t) en la cantidad
Transformada de Laplace
Vamos a resolver la ecuación diferencial mediante la transformada de Laplace para una fuerza similar a la anterior pero más general. La definición de la fuerza aplicada al móvil es ahora
Vamos a volver a obtener la expresión de x(t) utilizando la transformada de Laplace de la función escalón u(t-a) que es exp(-as)/s. La transformada de la función f(t)=F(t)/m es
Tenemos que calcular la transformada inversa de Laplace x1(t) de la expresión
Descomponemos la fracción en suma de fracciones simples
Examinando la tabla de las transformadas de Laplace obtenemos la expresión del primer término x1(t) debido a la fuerza
La solución completa es x(t)=x1(t)+x2(t)
Para el caso de que las condiciones iniciales sean: posición inicial x0=0 y velocidad inicial v0=0 en el instante t=0.
Esta es la respuesta x(t) a la acción de la fuerza F(t) que utilizaremos en los siguientes apartados.
Cuando a=0 como en el apartado anterior y para t≥0
Si la posición inicial x0=0 y velocidad inicial v0=0 en el instante t=0.
La misma expresión que hemos obtenido anteriormente
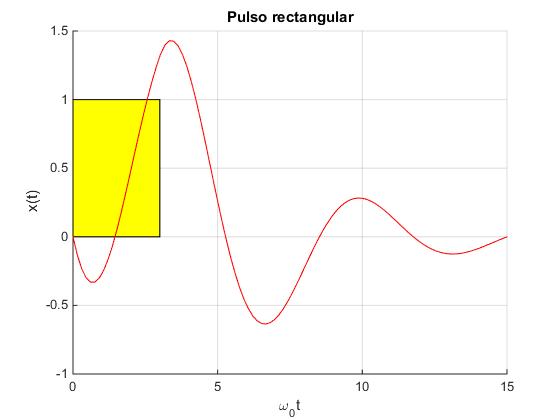
Pulso rectangular (superposición)
La definición de la función F(t) es
Como vemos en la figura de la derecha el pulso rectangular es la suma de dos funciones escalón
Aplicando el principio de superposición, el término x1(t)=x11(t)+x12(t) es la suma de dos términos debidos a cada una de las dos fuerzas: la fuerza F1(t)
- Para t>0
y la fuerza F2(t)
- Para t≥a
La solución completa es x(t)=x1(t)+x2(t)
Se sugiere al lector modificar los valores del amortiguamiento g<1, la anchura del pulso a y las condiciones iniciales: posición inicial x0 y velocidad inicial v0
Expresamos en MATLAB la función u(t-a) como una comparación (t≥a) que devuelve 1 si es cierto y cero si es falso.
g=0.25; %rozamiento
x0=0; %condiciones iniciales
v0=-1;
t=linspace(0,15,100); %w0·t en el eje horizontal
w=sqrt(1-g^2);
a=3; %anchura del pulso rectangular
%respuesta a la función escalón
f0=@(t) exp(-g*t).*(x0*cos(w*t)+(g*x0+v0)*sin(w*t)/w);
f=@(t,a) (t>=a)-exp(-g*(t-a)).*(g*sin(w*(t-a))/w+cos(w*(t-a)));
hold on
%Pulso
xx=[0 a a 0];
yy=[1 1 0 0];
fill(xx,yy,'y'); %rellena un área de color especificado
%respuesta
t1=t(t<a); x1=f0(t1)+f(t1,0);
t2=t(t>=a); x2=f0(t2)+f(t2,0)-f(t2,a);
x=[x1 x2];
plot(t,x,'r')
title('Pulso rectangular')
xlabel('\omega_0t')
ylabel('x(t)')
grid on
hold off
Para el caso de que las condiciones iniciales sean: posición inicial x0=0 y velocidad inicial v0=0 en el instante t=0.
Como en la sección anterior, representamos la función x(t) en función de ω0t para un valor del coeficiente de rozamiento γ=ω0·g, para ello escribimos la función x(t) de forma apropiada, poniendo
Nos queda por demostar que cuando a es muy pequeño y F0 es grande se obtiene la misma expresión para x(t) que hemos obtenido para el pulso delta de Dirac
donde el impulso I0 es igual al producto de la fuerza F0 por el tiempo que actúa a. I0=F0·a
Utilizamos MATLAB para calcular el límite de la expresión entre paréntesis de x(t)
Este límite es del tipo 0/0 que se puede resolver aplicando La regla de L'Hôpital.
>> syms g t w a; >> x=-exp(-g*t)*(cos(w*t)+g*sin(w*t)/w) +exp(-g*(t-a))*(cos(w*(t-a))+g*sin(w*(t-a))/w); >> limit(x/a,a,0) ans =(sin(t*w)*(g^2 + w^2))/(w*exp(g*t))
El límite vale
Por lo que
que es el mismo resultado que obtuvimos con la función delta de Dirac
Actividades
Se introduce
- la posición inicial x0, en el control titulado Posición inicial
- la velocidad inicial del móvil v0, en el control titulado Velocidad inicial.
- la constante de amortiguamiento γ, en el control titulado Amortiguamiento
- El tiempo de duración de la fuerza oscilante, en el control titulado Tiempo fuerza
- La frecuencia angular natural ω0=1 del oscilador se ha fijado en 1 rad/s
- El cociente F0/m=1 se ha fijado en el programa interactivo
Se pulsa en el botón Nuevo.
Probar con otras condiciones iniciales distintas de x0=0 y v0=0. Por ejemplo, x0=1 y v0=0, x0=0 y v0=-1.