

Puntos de Lagrange
Datos del sistema Tierra-Luna:
- Masa de la Tierra, MT=5.98·1024 kg
- Radio de la Tierra, RT=6370 km= 6.37·106 m
- Masa de la Luna, ML=7.34·1022 kg
- Radio de la Luna, RL=1740 km= 1.74·106 m
- Distancia entre la Tierra y la Luna, d=384400 km=384.4·106 m
La posición del centro de masas del sistema Tierra–Luna se encuentra entre el centro de la Tierra y el centro de la Luna a una distancia rT de la Tierra y rL de la Luna, tal como se muestra en la figura. Como la masa de la Tierra es mayor que la masa de la Luna MT>ML luego, rT<rL. Situando el origen en el centro de masas.
Despejamos rT y rL
La posición del centro de masas del sistema Tierra-Luna está en el interior de la Tierra, más cerca de la superficie que del centro.
Supondremos que el centro de la Tierra y el centro de la Luna se mueven en órbitas circulares de radios rT y rL, respectivamente, alrededor de su centro de masas común.
El centro de la Luna describe una trayectoria circular de radio rL bajo la acción de la fuerza de atracción de la Tierra, que dista d de su centro. Si ω es la velocidad angular constante. Aplicando la dinámica del movimiento circular uniforme a la Luna
El centro de la Tierra describe una trayectoria circular de radio rT bajo la acción de la fuerza de atracción de la Luna, que dista d de su centro. Si ω es la velocidad angular constante. Aplicando la dinámica del movimiento circular uniforme a la Tierra
Despejamos la velocidad angular ω de una u otra ecuación
El periodo P=2π/ω=27.2 días
Las distancias de la partícula al centro de la Tierra y al centro de la Luna son, respectivamente
Movimiento de una partícula bajo la influencia de la Tierra y la Luna
Sea d=rT+rL la distancia entre los centros de la Tierra y la Luna. Situamos un Sistema de Referencia Inercial con origen en el centro de masas del sistema Tierra-Luna. En el instante t, el ángulo que forma la recta que une el centro de la Tierra con el centro de la Luna forma un ángulo ωt, con el eje X.
La posición de la partícula en el instante t es (x, y). La posición de la Luna es (rL·cos(ωt), rL·sin(ωt)). La posición de la Tierra es (-rT·cos(ωt), -rT·sin(ωt))
La distancia entre la Luna y la partícula y entre la Tierra y la partícula son, respectivamente
Las componentes de la fuerza de atracción que ejerce la Luna y la Tierra sobre la partícula son
Aplicamos la segunda ley de Newton md2x/dt2=Fx, y md2y/dt2=Fy
Las fuerzas se pueden derivar, alternativamente, de la energía potencial
Sistema de Referencia en rotación
Establecemos un nuevo Sistema de Referencia No Inercial con el mismo origen que se mueve con velocidad angular ω, con respecto del Sistema de Referencia Inercial. El eje XR del nuevo Sistema de Referencia es la recta que pasa por el centro de la Tierra y el Centro de la Luna.
En la figura, se muestra la relación entre las posición de la partícula (x, y) en el Sistema de Referencia Inercial y la posición (xR, yR) en el Sistema de Referencia en rotación.
x=xR·cos(ωt)-yR·sin(ωt)
y=xR·sin(ωt)+yR·cos(ωt)
Las distancias de la partícula al centro de la Tierra y al centro de la Luna son, respectivamente
Calculamos las derivadas segundas de x e y
Introduciendo estas expresiones en las dos ecuaciones diferenciales de segundo orden, e igualando los coeficientes de cos(ωt) y de sin(ωt), obtenemos el siguiente sistema de dos educaciones diferenciales
Los dos términos en el primer miembro representan las componentes de las fuerzas de Coriolis y centrífuga por unidad de masa.
Ecuaciones del movimiento adimensionales
Establecemos un sistema de unidades tal que la distancia se mide en unidades de la distancia entre la Tierra y la Luna d=rT+rL y el tiempo se mide en unidades tal que un periodo P (tiempo que tarda en dar una vuelta completa la Tierra y la Luna alrededor del c.m.)
Llamando
Las dos ecuaciones diferenciales se convierten en
Simplificando, teniendo en cuenta que α=ML/(ML+MT) y 1-α=MT/(ML+MT)
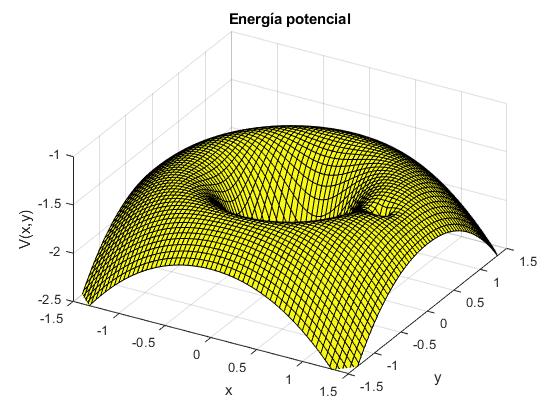
Energía potencial
El segundo miembro del sistema de dos ecuaciones diferenciales, se obtiene derivando el potencial V(XR, YR) respecto de XR y respecto de YR
- V(XR, YR)→-∞ en las posiciones de los centros de la Tierra (-α, 0) y de la Luna (1-α, 0)
- V(XR, YR)→-∞ cuando XR e YR son grandes como consecuencia del último término, debido a la rotación.
Para el sistema Tierra-Luna el parámetro α=ML/(MT+ML)=0.0121. Representamos la función V(XR, YR)
MT=5.98e24; %masa de la Tierra
ML=7.349e22; %masa de la Luna
alfa=ML/(ML+MT);
[x,y] = meshgrid(-1.5:0.05:1.5);
V=-(1-alfa)./sqrt((x+alfa).^2+y.^2)-alfa./sqrt((x-1+alfa).^2+y.^2)-(x.^2+y.^2)/2;
surf(x,y,V)
zlim([-2.5,-1])
xlabel('x');
ylabel('y');
zlabel('V(x,y)')
title('Energía potencial')
view(30,45)
Posiciones de equilibrio
Hay cinco posiciones de equilibrio o la fuerza es nula, son los denominados puntos de Lagrange
Las dos derivadas parciales deben de ser nulas simultáneamente
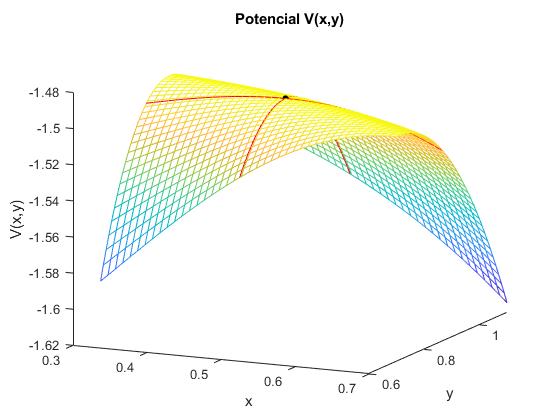
Puntos L4 y L5
Las dos posiciones más sencillas de encontrar son las denominadas L4 y L5, son simétricas respecto del eje X (dirección que une la Tierra y la Luna). Cuando YR≠0, dividimos la segunda ecuación por YR y tenemos el sistema de ecuaciones
Multiplicamos la segunda por -(XR+α) y la sumamos a la primera
Multiplicamos la segunda por -(XR-1+α) y la sumamos a la primera
Los dos puntos de Lagrange L4 y L5 son las intersecciones de las circunferencias de centros: la Tierra (0,-α) y la Luna (0, 1-α) y radio unidad. Resolviendo el sistema de dos ecuaciones con dos incógnitas obtenemos,
Representamos la energía potencial en las proximidades de unos de los dos puntos
MT=5.98e24; %masa de la Tierra
ML=7.349e22; %masa de la Luna
alfa=ML/(ML+MT);
%punto de Lagrange (0.8517,0)
X=0.3:0.01:0.7;
Y=0.7:0.01:1.1;
[x,y] = meshgrid(X,Y);
V=@(x,y) -(1-alfa)./sqrt((x+alfa).^2+y.^2)-alfa./sqrt((x-1+alfa).^2+y.^2)
-(x.^2+y.^2)/2;
hold on
mesh(x,y,V(x,y))
x1=1/2-alfa; y1=sqrt(3)/2; %punto de Lagrange
yy=ones(1,length(X))*y1;
plot3(X, yy,V(X,y1), 'color','r')
xx=ones(1,length(Y))*x1;
plot3(xx, Y,V(x1,Y), 'color','r')
plot3(x1,y1,V(x1,y1),'ko','markersize',4,'markeredgecolor','k',
'markerfacecolor','k')
hold off
xlabel('x');
ylabel('y');
zlabel('V(x,y)')
title('Potencial V(x,y)')
view(25,15)
Puntos L1, L2 y L3
Los otros tres puntos de Lagrange L1, L2 y L3, se encuentran en el eje X, (línea que une el centro de la Tierra y de la Luna)
Representamos la energía potencial V(XR, 0)
MT=5.98e24; %masa de la Tierra
ML=7.349e22; %masa de la Luna
alfa=ML/(ML+MT);
V=@(x,y) -(1-alfa)./sqrt((x+alfa).^2+y.^2)-alfa./
sqrt((x-1+alfa).^2+y.^2)-(x.^2+y.^2)/2;
f=@(x) V(x,0);
fplot(f,[-1.5,1.5])
grid on
ylim([-2.5,-1])
xlabel('x');
ylabel('V(x,0)')
title('Energía potencial, Y=0')
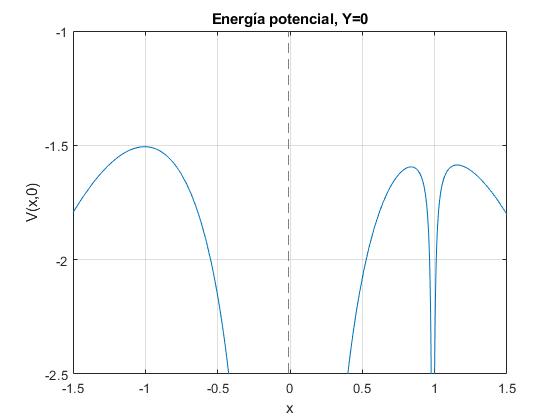
Observamos que hay tres posiciones XR en la que V(XR, 0) presenta un máximo
Cuando YR=0, se cumple que y buscamos las raíces con la primera ecuación
Para XR<-α, los dos numeradores son negativos, simplificamos
>> syms x k; >> z=(1-k)*(x-1-k)^2+k*(x+k)^2+x*(x-1-k)^2*(x+k)^2; >> zz=collect(z) zz =x^5 - 2*x^4 + ((k + 1)^2 + k^2 - 2*k*(2*k + 2))*x^3 + (2*k*(k + 1)^2 - k^2*(2*k + 2) + 1)*x^2 + ((2*k + 2)*(k - 1) + k^2*(k + 1)^2 + 2*k^2)*x + k^3 - (k - 1)*(k + 1)^2 >> z=subs(zz,k,alfa); >> p=sym2poly(z); >> roots(p) ans = -1.0050 + 0.0000i 0.4917 + 0.8589i 0.4917 - 0.8589i 1.0108 + 0.0791i 1.0108 - 0.0791i
Vemos que se obtiene un polinomio
Para -α<XR<1-α, (ente los centros de la Tierra y la Luna), el numerador de la izquierda es positivo y el de la derecha es negativo, simplificamos
>> z=-(1-k)*(x-1-k)^2+k*(x+k)^2+x*(x-1-k)^2*(x+k)^2; >> zz=subs(z,k,alfa); >> p=sym2poly(zz) >> roots(p) ans = -0.5068 + 0.8614i -0.5068 - 0.8614i 1.0809 + 0.1460i 1.0809 - 0.1460i 0.8517 + 0.0000i
Se obtienen cinco raíces, una es real, la última
Para XR>1-α, el numerador de la izquierda y de la derecha son positivos, simplificamos
>> z=-(1-k)*(x-1-k)^2-k*(x+k)^2+x*(x-1-k)^2*(x+k)^2; >> zz=subs(z,k,alfa); >> p=sym2poly(zz); >> roots(p) ans = -0.5054 + 0.8636i -0.5054 - 0.8636i 1.1729 + 0.0000i 0.9189 + 0.1315i 0.9189 - 0.1315i
Se obtienen cinco raíces, una es real, la tercera
Juntamos todas las porciones de código en un único script
MT=5.98e24; %masa de la Tierra
ML=7.349e22; %masa de la Luna
alfa=ML/(ML+MT);
syms k x;
z=(1-k)*(x-1-k)^2+k*(x+k)^2+x*(x-1-k)^2*(x+k)^2;
zz=subs(z,k,alfa);
p=sym2poly(zz);
raices=roots(p);
for i=1:length(raices)
if isreal(raices(i))
disp(raices(i))
end
end
z=-(1-k)*(x-1-k)^2+k*(x+k)^2+x*(x-1-k)^2*(x+k)^2;
zz=subs(z,k,alfa);
p=sym2poly(zz);
raices=roots(p);
for i=1:length(raices)
if isreal(raices(i))
disp(raices(i))
end
end
z=-(1-k)*(x-1-k)^2-k*(x+k)^2+x*(x-1-k)^2*(x+k)^2;
zz=subs(z,k,alfa);
p=sym2poly(zz);
raices=roots(p);
for i=1:length(raices)
if isreal(raices(i))
disp(raices(i))
end
end
Las tres posiciones (XR, 0) de los puntos de Lagrange L3, L1 y L2 son las siguientes
-1.0050
0.8517
1.1729
Observamos más de cerca la energía potencial V(XR, YR) en las proximidades de L1
MT=5.98e24; %masa de la Tierra
ML=7.349e22; %masa de la Luna
alfa=1/(1+MT/ML);
%punto de Lagrange (0.8517,0)
X=0.8:0.005:0.9;
Y=-0.1:0.005:0.1;
[x,y] = meshgrid(X,Y);
V=@(x,y) -(1-alfa)./sqrt((x+alfa).^2+y.^2)-alfa./sqrt((x-1+alfa).^2+y.^2)
-(x.^2+y.^2)/2;
hold on
mesh(x,y,V(x,y))
x1=0.8517;
plot3(x1,0,V(x1,0),'ko','markersize',4,'markeredgecolor','k',
'markerfacecolor','k')
yy=zeros(1,length(X));
plot3(X, yy,V(X,0), 'color','r')
xx=ones(1,length(Y))*x1;
plot3(xx, Y,V(x1,Y), 'color','r')
hold off
%zlim([-2.5,-1])
xlabel('x');
ylabel('y');
zlabel('V(x,y)')
view(30,45)
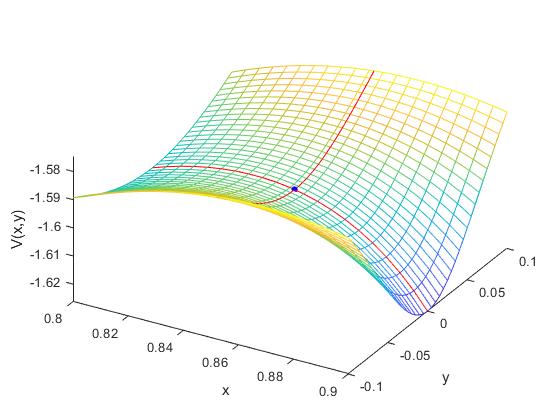
Se trata de un punto de ensilladura, es máximo a lo largo del eje X (línea que une el centro de la Tierra y de la Luna) y mínimo a lo largo de la dirección perpendicular que pasa por el punto
Estabilidad
Calculamos las derivadas segundas de V(XR, YR)
En este script, Math Symbolic de MATLAB realiza el cálculo de las derivadas segundas
MT=5.98e24; %masa de la Tierra
ML=7.349e22; %masa de la Luna
alfa=ML/(ML+MT);
%puntos de Lagrange
xL=[-1.0050, 0.8517, 1.1729, 1/2-alfa, 1/2-alfa];
yL=[0,0,0,sqrt(3)/2,-sqrt(3)/2];
syms x y k; %k es alfa
V=-(1-k)/sqrt((x+k)^2+y^2)-k/sqrt((x-1+k)^2+y^2)-(x^2+y^2)/2;
Vxx=diff(V,x,2);
Vyy=diff(V,y,2);
Vxy=diff(diff(V,x),y);
for i=1:length(xL)
disp([double(subs(Vxx,{k,x,y},{alfa, xL(i),yL(i)})),
double(subs(Vyy,{k,x,y},{alfa, xL(i),yL(i)})),
double(subs(Vxy,{k,x,y},{alfa, xL(i),yL(i)}))])
end
-3.0217 0.0109 0 -13.6834 5.3417 0 -6.0195 1.5097 0 -0.7500 -2.2500 -1.2675 -0.7500 -2.2500 1.2675
Los tres primeros puntos de Lagrange L1, L2 y L3 cumplen
Los dos restantes puntos de Lagrange L4 y L5 cumplen la condicción de máximo y por tanto, son inestables
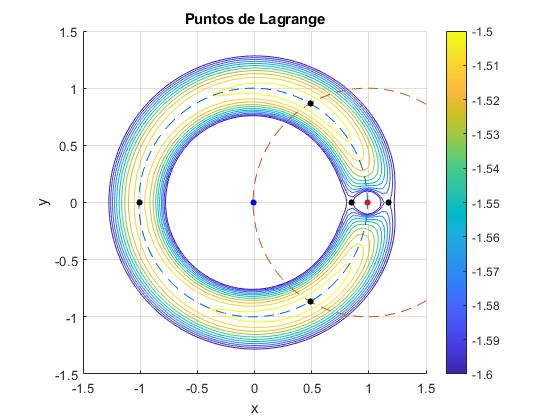
Si estuvieramos en un sistema de referencia fijo, concluiríamos que los cinco puntos de equilibrio son inestables, la fuerza , sobre una partícula de masa m estaría dirigida hacia afuera desde cada uno de dichos puntos cuando la partícula está cerca de los mismos. Sin embargo, el sistema de referencia está en rotación y en particular, para los puntos L4 y L5 hay que tener en cuenta la fuerza de Coriolis que como es perpendicular al vector velocidad no realiza trabajo alguno. Es posible, por tanto, que partículas describan trayectorias alrededor de estos dos puntos, siguiendo curvas de nivel (potencial constante). La energía cinética y potencial de dichas partículas se mantendría aproximadamente constantes
Puntos de Lagrange
Representamos la energía potencial V(XR, YR) mediante curvas de nivel utilizando
MT=5.98e24; %masa de la Tierra
ML=7.349e22; %masa de la Luna
alfa=ML/(ML+MT);
V=@(x,y) -(1-alfa)./sqrt((x+alfa).^2+y.^2)-alfa./sqrt((x-1+alfa).^2+y.^2)
-(x.^2+y.^2)/2;
hold on
fcontour(V,'LevelList',-1.60:0.01:-1.50)
colorbar
%Tierra y Luna
plot(-alfa,0,'bo','markersize',4,'markeredgecolor','b','markerfacecolor','b')
plot(1-alfa,0,'ro','markersize',4,'markeredgecolor','r','markerfacecolor','r')
%puntos de Lagrange
fplot(@(t) cos(t)-alfa,@(t) sin(t), [0,2*pi],'lineStyle','--')
fplot(@(t) cos(t)+1-alfa, @(t) sin(t), [0,2*pi],'lineStyle','--')
xL=[-1.0050, 0.8517, 1.1729, 1/2-alfa, 1/2-alfa];
yL=[0,0,0,sqrt(3)/2,-sqrt(3)/2];
for i=1:length(xL)
plot(xL(i),yL(i),'ko','markersize',4,'markeredgecolor','k',
'markerfacecolor','k')
end
hold off
xlim([-1.5,1.5])
ylim([-1.5,1.5])
axis square
grid on
xlabel('x')
ylabel('y')
title('Puntos de Lagrange')
Referencias
Keith R. Symon. Mechanics. Addison-Wesley Publishing Company, Second edition, pp. 285-290
Grant R. Fowles, George L. Cassiday. Analytical Mechanics. Edt. Thomson Brooks/Cole (2005), pp. 291-295