

Navagación a vela solar
En la página titulada, el efecto de la radiación electromagnética sobre el movimiento de los cuerpos se explica que una vela solar está sometida a dos fuerzas:
La fuerza repulsiva que ejerce la presión de la radiación solar sobre la superficie plana de la vela, cuya dirección es perpendicular a la vela.
La fuerza atractiva que ejerce el Sol sobre la vela, cuya dirección es radial
Donde λ es un parámetro (lightness number) que depende de la vela y la radiación solar
La vela es perpendicular a la dirección radial
La situación más simple se produce cuando el ángulo α=0. El efecto neto de la radiación solar es el de disminuir la aceleración de la gravedad local GM/r2
Se trata de una fuerza central y conservativa, su energía potencial es
La nave espacial con la vela desplegada describe una trayectoria que es una cónica que en coordenadas polares, basta sustituir GMm por GMm(1-λ)
Consideremos una nave espacial de masa m que describe una órbita circular de radio r0 alrededor del Sol (masa M)
Aplicamos la ecuación de la dinámica del movimiento circular uniforme.
La energía de la nave espacial es
En un momento dado la nave espacial despliega una vela plana perpendicular a la dirección radial de parámetro λ. La energía y el momento angular es
Los parámetros d y ε (excentricidad) de su trayectoria valen
La ecuación de la trayectoria es una cónica (elipse, parábola o hipérbola) dependiendo del valor del parámetro λ .
| Cónica | Parámetro λ | Excentricidad ε | Energía |
|---|---|---|---|
| Elipse | λ<1/2 | ε<1 | E<0 |
| Parábola | λ=1/2 | ε=1 | E=0 |
| Hipérbola | λ>1/2 | ε>1 | E>0 |
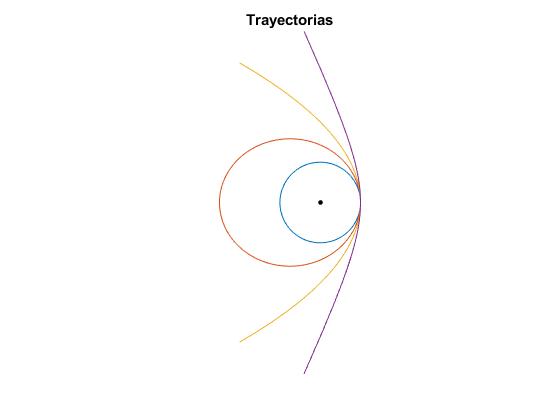
Sea una nave espacial que describe una órbita circular de r0=1.496·1011 m, alrededor del Sol, la misma que la Tierra. En un momento dado despliega la vela, vamos a representar la trayectoria que sigue para λ=0.3, 0.5 y 0.7
r0=1; %una UA=1.496e11 m
hold on
fplot(@(x) cos(x), @(x) sin(x),[0,2*pi]); %órbita circular
for lambda=[0.3,0.5,0.7]
d=r0/(1-lambda);
ex=lambda/(1-lambda);%excentricidad
f=@(x) d./(1+ex*cos(x));
ang=pi; %elipse
if ex>1 %hipérbola
ang=acos(-1/ex)-20*pi/180;
elseif ex==1 %parábola
ang=2*pi/3;
end
fplot(@(x) f(x).*cos(x), @(x) f(x).*sin(x) ,[-ang,ang])
end
plot(0,0,'ko','markersize',3,'markeredgecolor','k','markerfacecolor','k')
hold off
axis equal
axis off
xlabel('x')
ylabel('y')
grid on
title('Trayectorias')
Solución numérica
En la página titulada Solución numérica de las ecuaciones del movimiento, las componentes de la aceleración de la nave espacial con la vela desplegada son
Antes de resolver el sistema de ecuaciones diferenciales por procedimientos numéricos, es conveniente prepararlas para que el ordenador no maneje números excesivamente grandes o pequeños.
Establecemos un sistema de unidades en el que la longitud se mide en unidades r0=1.496·1011 m y el tiempo en unidades P=2πr0/v0, el tiempo que tarda en dar una vuelta completa
Lo mismo para la ecuación diferencial en y. Resolvemos el sistema de ecuaciones diferenciales
Con las condiciones iniciales siguientes: en el instante τ=0, parte de la posición X=1, Y=0, con velocidad inicial, dX/dτ=0, dY/dτ=v0(P/r0)=2π
Definimos una función denominada
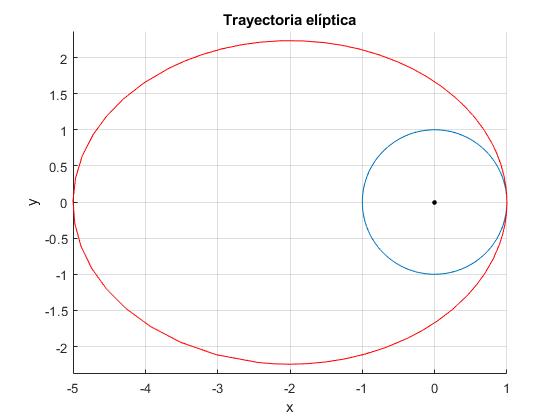
function vela_solar_1
lambda=0.4; %parámetro lambda
fg=@(t,x)[x(2);-4*pi^2*(1-lambda)*x(1)/(sqrt(x(1)^2+x(3)^2))^3; x(4);
-4*pi^2*(1-lambda)*x(3)/(sqrt(x(1)^2+x(3)^2))^3];
opts=odeset('events',@stop_nave);
[~,x]=ode45(fg,[0,10],[1,0,0,2*pi], opts);
hold on
fplot(@(x) cos(x), @(x) sin(x),[0,2*pi]);
plot(x(:,1),x(:,3),'r') %órbita elíptica
plot(0,0,'ko','markersize',3,'markeredgecolor','k','markerfacecolor','k')
hold off
axis equal
xlabel('x')
ylabel('y')
grid on
title('Trayectoria elíptica')
function [detect,stopin,direction]=stop_nave(~,x)
detect=x(3);
stopin=1;
direction=1;
end
end
La normal a la vela plana forma un ángulo α con la dirección radial
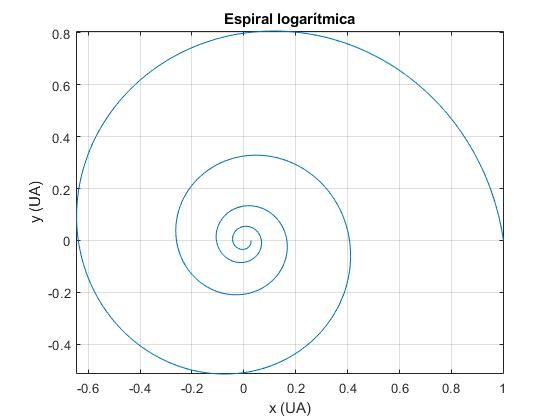
En la página titulada Viaje de la Tierra a Marte siguiendo una trayectoria en forma de espiral logarítmica, estudiamos la trayectoria en forma de espiral logarítmica que sigue una nave espacial cuyos motores proporcionan una fuerza de empuje inversamente proporcional a la distancia al Sol, tangente a la trayectoria
En esta ocasión, la fuerza de empuje F (inversamente proporcional al cuadrado de la distancia) no es tangente a la trayectoria, sino que forma un ángulo α con la dirección radial. Las ecuaciones del movimiento son
La ecuación de la trayectoria en coordenadas polares es
Velocidad de la nave espacial
Derivamos dos veces r respecto del tiempo t
Sustituimos en la primera ecuación diferencial
Sustituimos en la segunda ecuación diferencial, rd2θ/dt2 y dr/dt llegando a
El módulo de la velocidad de la nave espacial en coordenadas polares es
Ecuaciones paramétricas de la trayectoria
Obtenemos r en función del tiempo t
Obtenemos θ en función del tiempo t
El resultado es
Tiempo de viaje desde r0 a r1
Las ecuaciones paramétricas (en función del tiempo t) de la trayectoria son
Cuando llega a la posicíon final r=r1
Para una espiral hacia dentro r<r0, el ángulo γ<0
Cálculo del ángulo γ
La segunda ecuación del movimiento, nos permite relacionar los ángulos γ y α
Teniendo en cuenta, la ecuación de la trayectoria. Partimos de
Derivamos con respecto del tiempo, el segundo miembro es constante
Introducimos ésta en la segunda ecuación del movimiento y teniendo en cuenta la expresión de dr/dt
Dado el ángulo α que forma la normal a la vela y la dirección radial, resolvemos la ecuación transcendente. Para que la espiral sea hacia dentro, el ángulo γ<0. Sea λ=0.3 y α=-10°
lambda=0.3;
alfa=-10*pi/180;
f=@(x) (1-lambda*cos(alfa)^3)*sin(x).*cos(x)-lambda*cos(alfa)^2*sin(alfa)*
(1+cos(x).^2);
fplot(f,[-pi/2,pi/2])
grid on
xlabel('\gamma')
ylabel('f(\gamma)')
title('Raices de la ecuación transcendente')
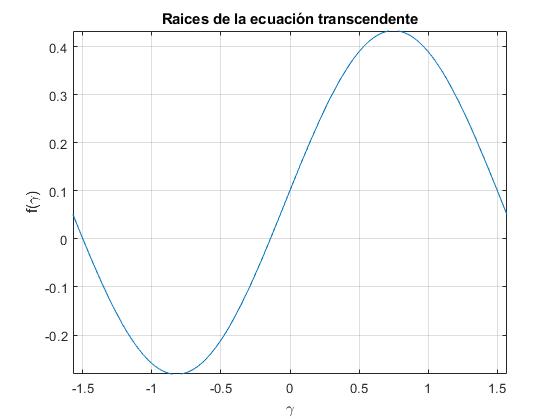
En la gráfica, vemos que hay dos posibles raíces, una cercana a 0 y otra a -π/2, tomamos la primera de ellas.
Calculamos γ mediante
lambda=0.3;
alfa=-10*pi/180;
f=@(x) (1-lambda*cos(alfa)^3)*sin(x)*cos(x)-lambda*cos(alfa)^2*sin(alfa)*
(1+cos(x)^2);
gamma=fzero(f,[-pi/4,0]);
r0=1; %posición de partida, 1 UA
r=@(th) r0*exp(th*tan(gamma));
fplot(@(x) r(x).*cos(x), @(x) r(x).*sin(x), [0,8*pi])
axis equal
grid on
xlabel('x (UA)')
ylabel('y (UA)')
title('Espiral logarítmica')
>> gamma*180/pi -8.1425 >> r(8*pi) %posición de llegada ans = 0.0274 >> M=1.98e30; %masa del Sol >> G=6.67e-11; %constante >> T=2*(r(8*pi)^(3/2)-r0^(3/2))*1.496e11^(3/2)/(3*sin(gamma)* sqrt(G*M*(1+lambda*cos(alfa)^2*(sin(alfa)*tan(gamma)-cos(alfa))))); >> T/(24*3600) ans = 321.6399
El ángulo γ=-8.1425°. Cuando θ=8π, la distancia al Sol es r1=0.0274 UA, empleando un tiempo T=321.6 días en viajar desde la posición r0= 1 UA, θ=0
Trabajo-energía
El trabajo de las fuerzas que actúan sobre el cuerpo celeste es igual a la variación de energía cinética
La resultante de las fuerzas que actúan sobre la nave espacial de masa m es
El vector desplazamiento (en coordendas polares)
Efectuamos el producto escalar e integramos para calcular el trabajo (por unidad de masa)
La variación de energía cinética es (véase la expresión de la velocidad v2)
Comprobamos que ambas expresiones son iguales por la relación existente entre los ángulos α y γ
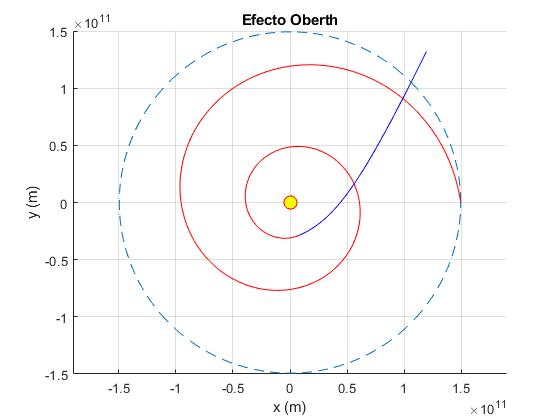
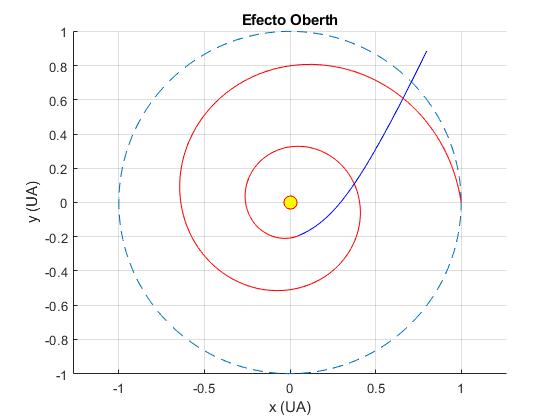
Efecto Oberth
El efecto Oberth ha sido estudiado en la página titulada El efecto Oberth. Una nave espacial inicialmente en órbita circular de radio r0 alrededor del Sol, enciende sus motores durante un intervalo de tiempo muy pequeño para disminuir la velocidad. La nave espacial describe la mitad de una trayectoria elíptica. Cuando llega al perihelio enciende los motores para incrementar la velocidad y alcanzar el infinito con velocidad v∞
En este apartado, la nave espacial inicialmente en órbita circular de radio r0 alrededor del Sol con la vela desplegada perpendicular a la dirección radial α=0, gira la vela para formar un ángulo α (negativo) con el fin de describir una espiral logarítmica hacia dentro que le acerque al Sol. Cuando llegue a una distancia r1, encenderá los motores durante un breve intervalo de tiempo, para incrementar la velocidad a la vez que gira la vela para que coincida la normal y la dirección radial, α=0
Esta maniobra sustituye la trayectoria elíptica por la espiral logarítmica, investigaremos si presenta alguna ventaja tanto en el consumo de combustible como en el tiempo de viaje durante la trayectoria intermedia
Orbita circular
La vela está orientada perpendicular a la dirección radial, α=0. La fuerza que actúa sobre la nave espacial con la vela desplegada es
Aplicamos la ecuación de la dinámica del movimiento circular uniforme.
Espiral logarítmica
En un momento dado se gira la vela, para que su normal forme un ángulo α (negativo) con el fin de describir una espiral logarítmica hacia dentro.
-
Dado el ángulo α resolvemos la ecuación transcendente para calcular el ángulo γ
Calculamos la velocidad de la nave espacial V0 en la posición inicial r0
Las ecuaciones paramétricas que describen la trayectoria son
El tiempo T que emplea en describir esta trayectoria es
La velocidad de la nave espacial v1 en la posición final es
La nave espacial enciende durante un intervalo muy pequeño de tiempo para cambiar su velocidad de v0 a V0
El ángulo final , para r=r1 es
Impulso en el perihelio
La nave espacial enciende durante un intervalo muy pequeño de tiempo para cambiar su velocidad de v1 a V1=v1+Δv a la vez que gira la vela en dirección perpendicular a la radial, α=0, con el fin de alcanzar la velocidad v∞ en el infinito describiendo una trayectoria hiperbólica
El principio de conservación de la energía (por unidad de masa)
Trayectoria final
La nave espacial parte de la posición (r1cosθ1, r1sinθ1), con velocidad V1=v1+Δv, que forma un ángulo π/2-γ con la dirección radial
Para representar la trayectoria final, tenemos dos opciones: (véase la primera sección)
Calcular los parámetros d y excentricidad ε y representar la hipérbola con el eje girado
-
Resolver las ecuaciones diferenciales del movimiento
En el programa interactivo (más abajo) adoptamos la segunda solución
Ejemplo
La nave espacial provista de una vela de parámetro λ=0.3, describe una órbita circular de radio r0=1.496·1011 m (1 UA) alrededor del Sol cuya masa es M=1.98·1030 kg. La constante G=6.67·10-11 Nm2/kg2
La velocidad de la nave espacial con la vela desplegada perpendicular a la dirección radial α=0, es v0=24.859 km/s, un poco menor que la velocidad de la misma nave espacial en órbita circular del mismo radio pero sin vela, 29.712 km/s
M=1.98e30; %masa del Sol G=6.67e-11; %constante r0=1.496e11; %posición de partida, 1 UA lambda=0.3; %parámetro v0=sqrt(G*M*(1-lambda)/r0); ...
Gira la vela para que la normal y la dirección radial formen un ángulo α=-10°, con el fin de que la nave espacial describa una espiral hacia dentro. Resolvemos la ecuación transcendente utilizando el procedimiento
... alfa=-10*pi/180; f=@(x) (1-lambda*cos(alfa)^3)*sin(x)*cos(x)-lambda*cos(alfa)^2* sin(alfa)*(2-sin(x)^2); gamma=fzero(f,[-pi/4,0]); ....
Obtenemos γ=-0.1421 (-8.14°)
Para pasar de la órbita circular a la espiral hemos de cambiar la velocidad de la nave de v0=24.859 km/s a V0=25.224 km/s
La nave espacial va a viajar hacia el Sol hasta una distancia r1=0.2 UA=2.9920·1010 m. El ángulo final es θ1=11.2487 rad
El tiempo que tarda en describir esta trayectoria T=2.5420·107 s=294.2 días
-
La velocidad de la nave espacial al final de esta trayectoria es v1=56.6401 km/s
... V0=sqrt(G*M*(1+lambda*cos(alfa)^2*(sin(alfa)*tan(gamma)-cos(alfa)))/r0); r1=0.2*r0; %posición de llegada th_1=log(r0/r1)/tan(gamma); T=2*(r1^(3/2)-r0^(3/2))/(3*sin(gamma)*sqrt(G*M*(1+lambda*cos(alfa)^2* (sin(alfa)*tan(gamma)-cos(alfa))))); v1=sqrt(G*M*(1+lambda*cos(alfa)^2*(sin(alfa)*tan(gamma)-cos(alfa)))/r1); ...
Queremos que la nave espacial con la vela perpendicular a la dirección radial alcance el infinito con velocidad
La velocidad en la posición r1 deberá ser V1=v1+Δv=90.365 km/s
A partir de este momento sigue una trayectoria hiperbólica que la lleva al infinito
El cambio de velocidad que experimenta la nave espacial al comienzo y al final de la trayectoria espiral es
Δv=(V0-v0)+(V1-v1)=(25.224-24.859)+(90.365-56.6401)=34.0899 km/s.
Casi todo el combustible se gasta en el segundo impulso.
M=1.98e30; %masa del Sol
G=6.67e-11; %constante
r0=1.496e11; %posición de partida, 1 UA
lambda=0.3;
v0=sqrt(G*M*(1-lambda)/r0);
alfa=-10*pi/180;
f=@(x) (1-lambda*cos(alfa)^3)*sin(x)*cos(x)-lambda*cos(alfa)^2*sin(alfa)*
(2-sin(x)^2);
gamma=fzero(f,[-pi/4,0]);
V0=sqrt(G*M*(1+lambda*cos(alfa)^2*(sin(alfa)*tan(gamma)-cos(alfa)))/r0);
r1=0.2*r0; %posición de llegada
th_1=log(r1/r0)/tan(gamma);
T=2*(r1^(3/2)-r0^(3/2))/(3*sin(gamma)*sqrt(G*M*(1+lambda*cos(alfa)^2*
(sin(alfa)*tan(gamma)-cos(alfa)))));
v1=sqrt(G*M*(1+lambda*cos(alfa)^2*(sin(alfa)*tan(gamma)-cos(alfa)))/r1);
v_inf=1.5*sqrt(G*M/r0);
V1=sqrt(v_inf^2+2*G*M*(1-lambda)/r1);
r=@(th) r0*exp(th*tan(gamma));
hold on
fplot(@(x) r0*cos(x), @(x) r0*sin(x), [0,2*pi], 'lineStyle','--')
fplot(@(x) r(x).*cos(x), @(x) r(x).*sin(x), [0,th_1], 'color','r')
fg=@(t,x)[x(2);-G*M*(1-lambda)*x(1)/(sqrt(x(1)^2+x(3)^2))^3; x(4);
-G*M*(1-lambda)*x(3)/(sqrt(x(1)^2+x(3)^2))^3];
vx=V1*(sin(gamma)*cos(th_1)-cos(gamma)*sin(th_1));
vy=V1*(sin(gamma)*sin(th_1)+cos(gamma)*cos(th_1));
[~,x]=ode45(fg,[0,3e6],[r1*cos(th_1),vx,r1*sin(th_1),vy]);
plot(x(:,1),x(:,3),'b') %órbita elíptica
plot(0,0,'o','markersize',10,'markeredgecolor','r','markerfacecolor','y')
hold off
grid on
axis equal
xlabel('x (m)')
ylabel('y (m)')
title('Efecto Oberth')
Comparación con la trayectoria elíptica intermedia
Vamos a comprobar si el cambio de la trayectoria intermedia de elíptica a espiral en el efecto Oberth presenta alguna ventaja
La nave espacial describe una órbita circular de radio r0 con velocidad v0
La nave espacial disminuye su velocidad de v0 a v2 en el afelio de la trayectoria elíptica
En el perihelio, la nave espacial lleva un velocidad v1=85.771 km/s,
mucho mayor que la que lleva la nave espacial en la trayectoria en espiral v1=56.6401 km/s. El efecto Oberth debería ser más acusado con la trayectoria elíptica que con la trayectoria en espiral.
Se le proporciona una velocidad adicional para que alcance el infinito con velocidad v∞. El cambio de velocidad en el perihelio es
Sabiendo que r0=1.496·1011 m (1 UA), r1=0.2 UA y v∞=1.5·v0. Obtenemos, v0=29.712 km/s, Δva=v2-v0=-12.558 km/s, Δvp=vp-v1=18.221 km/s. Total, |Δva|+Δvp=30.779 km/s
Se consume menos combustible en la trayectoria elíptica que en la espiral. El tiempo de viaje en la trayectoria elíptica es medio periodo, P1/2=7.3515·106 s (85 días) mucho menos que para la trayectoria espiral
M=1.98e30; %masa del Sol G=6.67e-11; %constante r0=1.496e11; %posición de partida, 1 UA v0=sqrt(G*M/r0); %inicial en órbita circular r2=r0; %afelio r1=0.2*r0; %perihelio %elípticar1=0.2*r2; %perihelio v2=sqrt(2*G*M*r1/(r2*(r1+r2))); %afelio v1=sqrt(2*G*M*r2/(r1*(r1+r2))); %perihelio P_2=pi*((r1+r2)/2)^(3/2)/sqrt(G*M); v_inf=1.5*v0; %velocidad en el infinito vp=sqrt(v_inf^2+2*G*M/r1); %inicial hiperbólica DVa=v2-v0; %cambios de velocidad DVp=vp-v1; disp([DVa,DVp])
Escalas
El script anterior es correcto, pero se puede hacer más eficiente, si se adoptan escalas de modo que las operaciones se efectúan entre números mucho más pequeños. Adoptamos las siguientes unidades (véase el primer apartado): la longitud se mide en UA (1.496·1011 m), la unidad de tiempo P es el que tarda en dar una vuelta completa una nave espacial en órbita circular una UA de radio alrededor de Sol
La velocidad se divide por
r0=1; %posición de partida, 1 UA
lambda=0.3;
v0=2*pi*sqrt(1-lambda);
alfa=-10*pi/180;
f=@(x) (1-lambda*cos(alfa)^3)*sin(x)*cos(x)-lambda*cos(alfa)^2*sin(alfa)
*(2-sin(x)^2);
gamma=fzero(f,[-pi/4,0]);
V0=2*pi*sqrt((1+lambda*cos(alfa)^2*(sin(alfa)*tan(gamma)-cos(alfa))));
r1=0.2; %posición de llegada
th_1=log(r1/r0)/tan(gamma);
T=2*((r1/r0)^(3/2)-1)/(6*pi*sin(gamma)*sqrt(1+lambda*cos(alfa)^2*(sin(alfa)*
tan(gamma)-cos(alfa))));
v1=2*pi*sqrt((1+lambda*cos(alfa)^2*(sin(alfa)*tan(gamma)-cos(alfa)))*r0/r1);
v_inf=1.5;
V1=2*pi*sqrt(v_inf^2+2*(1-lambda)*r0/r1);
r=@(th) r0*exp(th*tan(gamma));
hold on
fplot(@(x) cos(x), @(x)sin(x), [0,2*pi], 'lineStyle','--')
fplot(@(x) r(x).*cos(x), @(x) r(x).*sin(x), [0,th_1], 'color','r')
fg=@(t,x)[x(2);-4*pi^2*(1-lambda)*x(1)/(sqrt(x(1)^2+x(3)^2))^3; x(4);
-4*pi^2*(1-lambda)*x(3)/(sqrt(x(1)^2+x(3)^2))^3];
vx=V1*(sin(gamma)*cos(th_1)-cos(gamma)*sin(th_1));
vy=V1*(sin(gamma)*sin(th_1)+cos(gamma)*cos(th_1));
[~,x]=ode45(fg,[0,0.0948],[r1*cos(th_1),vx,r1*sin(th_1),vy]);
plot(x(:,1),x(:,3),'b') %órbita elíptica
plot(0,0,'o','markersize',10,'markeredgecolor','r','markerfacecolor','y')
hold off
grid on
axis equal
xlabel('x (UA)')
ylabel('y (UA)')
title('Efecto Oberth')
Actividades
Se introduce
- El parámetro λ, en el control titulado Parámetro
- El ángulo α (negativo) que forma la normal al plano de la vela con la dirección radial, en el control titulado Angulo vela
- La velocidad de la nave espacial muy lejos del Sol v∞, en el control titulado Velocidad en el infinito
- La distancia más cercana (perihelio) al Sol r1, en el control titulado Perihelio
- Se ha fijado el radio de la órbita circular inicial r0=1 UA
Se pulsa el botón titulado Nuevo
Observamos la nave espacial (punto de color rojo) con la vela desplegada (un segmento de color blanco) en órbita circular alrededor del Sol.
Cuando describe media órbita enciende los motores durante un pequeño intervalo de tiempo a la ver que gira la vela un ángulo α (negativo) para incorporarla a una trayectoria espiral logarítmica que la acerque al Sol
Al final de la trayectoria espiral, la nave enciende de nuevo los motores para proporcionarle un impulso que le lleve al infinito con velocidad v∞
Se representa las trayectorias y se proporcionan los datos de la distancia r de la nave al Sol y su velocidad v
En la parte izquierda, se representa el cambio de velocidad que experimenta la nave en los dos impulsos: en el afelio (órbita circular) y en el perihelio. Observamos que casi todo el combustible se gasta en el segundo impulso. En la parte derecha se proporcionan los datos de
- El tiempo parcial t desde el comienzo de cada una de las trayectorias
- La distancia r al centro del Sol en UA
- El módulo de la la velocidad, v
Referencias
Coryn A. L. Bailer-Jones. The sun diver: Combining solar sails with the Oberth effect. Am. J. Phys.89 (3), March 2021. pp. 235-243