

Dos partículas unidas por una cuerda
Coordenadas polares
La posición de una partícula es (x, y) en coordenadas rectangulares y (r, θ) en coordenadas polares. La relación es
x=r·cosθ, y=r·sinθ
Expresamos la velocidad de la partícula en coordenadas polares
Calculamos las componentes rectangulares de los vectores unitarios y
vemos que
Las expresión del vector velocidad en coordenadas polares es
Las expresión del vector aceleración es:
Ecuaciones del movimiento de las partículas
Supongamos dos cuerpos de masas m1 y m2 unidos por una cuerda inextensible y de masa despreciable que pasa a través de un pequeño agujero hecho en un tablero. El primer cuerpo se puede mover en el plano horizontal, mientras que el segundo se puede mover hacia arriba o hacia abajo a lo largo del eje vertical Z, tal como se muestra en la figura. Consideramos únicamente la situación ideal sin rozamiento alguno.
- Sobre el cuerpo de masa m1 actúa la tensión T de la cuerda a lo largo de la dirección radial.
- Sobre el cuerpo de masa m2 actúa la tensión de la cuerda y su peso m2g
Establecemos un sistema de referencia, de modo que el origen está en el orificio hecho en la tabla, el eje Z apunta hacia abajo, la posición del cuerpo m2 es z y la posición del cuerpo m1 viene determinado por su distancia radial r al orificio y el ángulo θ que hace con el eje X, tal como se muestra en la figura. Si la longitud de la cuerda es l, se cumple que r+z=l.
La ecuación del movimiento de m2 es
o bien,
En el primer apartado, hemos obtenido las expresiones de las componentes del vector aceleración en coordenadas polares. Formulamos la segunda ley de Newton para cada una de las componentes, teniendo en cuenta que la única fuerza que actúa sobre la partícula (la tensión de la cuerda) tiene dirección radial y sentido hacia el origen.
La segunda ecuación nos indica que el momento angular L (expresado en coordenadas polares es constante)
Teniendo en cuenta la constancia del momento angular L y eliminado la tensión T de la cuerda en las ecuaciones del movimiento de las dos partículas, llegamos a la ecuación diferencial que describe el movimiento de la partícula de masa m1 en la dirección radial, r.
Las ecuaciones diferenciales que describen el movimiento de la partícula sobre el tablero en coordenadas polares (r, θ), son por tanto,

Con las condiciones iniciales siguientes: la partícula parte en el instante t=0 de la posición r0, θ=0, con velocidad dr/dt=v0cosφ, r0(dθ/dt)0=v0sinφ.
El momento angular L=m1r0v0sinφ
Energía del sistema de partículas
Establecemos el nivel cero de energía potencial en origen z=0. La energía E del sistema de dos partículas es constante
Teniendo en cuenta la constancia del momento angular L y que z+r=l
La energía inicial del sistema en el instante t=0 es
Derivando esta ecuación con respecto del tiempo y teniendo en cuenta, que la energía E es constante, dE/dt=0, obtenemos la ecuación del movimiento de m1 en la dirección radial.
En los puntos de máximo acercamiento o alejamiento, al origen, dr/dt=0, la velocidad en la dirección radial se hace cero, obtenemos una ecuación cúbica a partir de la cual obtenemos rmin y rmax, véase el ejemplo más abajo
Casos particulares
Dos situaciones se analizan a nivel elemental
Movimiento en la dirección radial
La situación más sencilla, es aquella en la que m1 en reposo, se libera y se mueve en dirección radial. Las ecuaciones del movimiento en la dirección radial para la partícula de masa m1 y de la partícula de masa m2 a lo largo del eje Z, son
Teniendo en cuenta que z+r=l y eliminando la tensión T, vemos que la aceleración de las partículas es constante, m2g/(m1+m2), para m2 y de signo contrario para m1. La distancia radial r de la partícula m1 en función del tiempo t es
Movimiento circular uniforme
Para que la partícula de masa m1 describa una trayectoria circular de radio r0, bajo la acción de la tensión T=m2g, tiene que llevar una velocidad angular ω0, tal que se cumpla la ecuación de la dinámica del movimiento circular uniforme (fuerza =masa por aceleración normal)
Por ejemplo, para r0=3, m1=1, m2=0.365. La partícula describe un movimiento circular uniforme si se mueve con velocidad angular constante ω0=1.1030. El periodo o tiempo que tarda en dar una vuelta completa es 2π/ω0=5.6963
Trayectorias casi circulares
Para una trayectoria circular el momento angular L es
Escribiendo r=r0+x con x<<r0, la ecuación del movimiento en la dirección radial es
Utilizando la aproximación,
Nos queda la ecuación
Que representa un Movimiento Armónico Simple de periodo
Trayectorias
Resolvemos, el sistema de dos ecuaciones diferenciales por procedimientos numéricos, para obtener la posición de la partícula (r,θ) en cada instante t con las siguientes condiciones iniciales, en el instante t=0, r=r0, dr/dt=0 y dθ/dt=ω0
El momento angular y la energía valen
El principio de conservación de la energía se escribe
Poniendo dr/dt=0, calculamos la máxima y mínima distancia de alejamiento de la partícula de masa m1 al origen, las raíces positivas de la ecuación cúbica
Para calcular las raíces de una ecuación cúbica utilizamos el procedimiento descrito en la página titulada Raíces de una ecuación (I)
m1=1; %masa de la partícula sobre el plano horizontal
m2=0.365; %masa de la partícula que cuelga
w0=0.6; %velocidad angular inicial en la
r0=3; %posición inicial r0, que se mantiene fija
tf=10; %tiempo final, ajustar
L=m1*r0^2*w0; %momento angular constante
x0=[r0,0,0]; %condiciones iniciales
%x(1) es r, x(2) es dr/dt, x(3) es theta
fg=@(t,x) [x(2); L^2/(m1*(m1+m2)*x(1)^3)-m2*9.8/(m1+m2);L/(m1*x(1)^2)];
[t,x]=ode45(fg,[0,tf],x0);
plot(x(:,1).*cos(x(:,3)), x(:,1).*sin(x(:,3)))
grid on
xlabel('r')
ylabel('\theta')
axis equal
figure
%raíces de la ecuación cúbica, máximo y mínimo acercamiento
subplot(2,1,1)
a=2*m2*9.8;
b=-(m1*r0^2*w0^2+2*m2*9.8*r0);
d=m1*r0^4*w0^2;
p=[1,b/a,0,d/a];
dist=raices_3(p);
hold on
for i=1:3
if dist(i)>0
line([0,10],[dist(i),dist(i)],'lineStyle','--','color','k')
end
end
plot(t,x(:,1))
hold off
grid on
xlabel('t')
ylabel('r')
subplot(2,1,2)
plot(t,x(:,3))
grid on
xlabel('t')
ylabel('\theta')
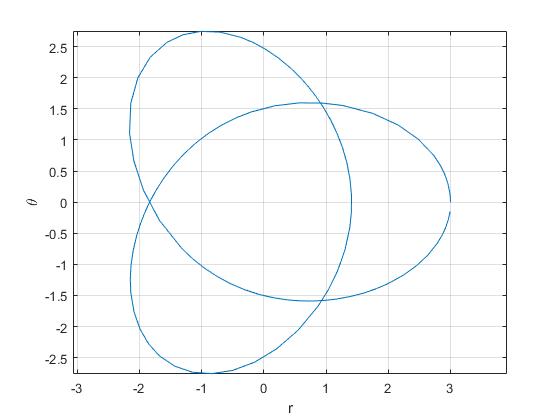
Se representa la trayectoria de la partícula sobre el plano horizontal
Se representa sus coordenadas (r, θ) en función del tiempo t
Las líneas a trazos señalan, las distancias de máximo y mínimo acercamiento de la partícula de masa m1 al origen, las raíces positivas de la ecuación cúbica
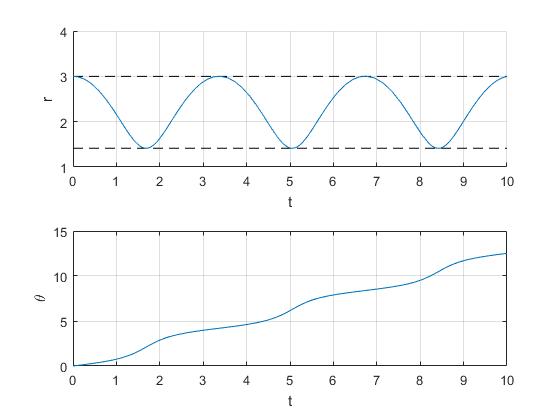
Comprobamos que la energía es aproximadamente constante en todos los puntos de la trayectoria
>> 0.5*(m1+m2)*x(:,2).^2+L^2./(2*m1*x(:,1).^2)+m2*9.8*x(:,1) ans = 12.3510 12.3510 12.3510 ......
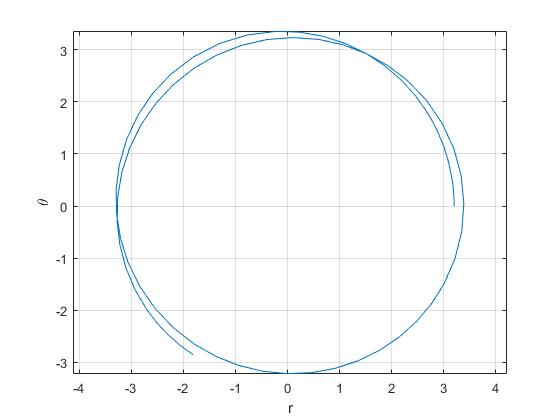
Trayectorias casi circulares
Para que se produzca una trayectoria circular de radio r0=3, la velocidad angular ω0=1.1030 rad/s. Cambiamos las condiciones iniciales de modo que r0=3.2, vemos que se produce una oscilación en la dirección radial de periodo P=4.0 s
m1=1; %masa de la partícula sobre el plano horizontal m2=0.365; %masa de la partícula que cuelga w0=1.1030; %velocidad angular inicial en la r0=3.2; %posición inicial r0, que se mantiene fija tf=10; %tiempo final, ajustar ....
Se representa la trayectoria de la partícula sobre el plano horizontal
Se representa sus coordenadas (r, θ) en función del tiempo t
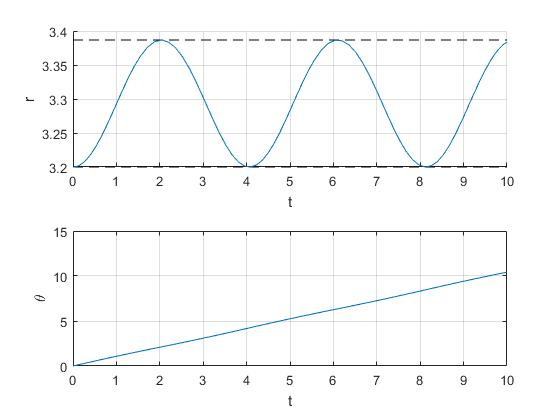
Como vemos en la gráfica, el tiempo entre dos máximos de la distancia radial r es aproximadamente 4 s. Calculamos el periodo de las oscilación radial
>> P=2*pi*sqrt((m1+m2)*r0/(3*m2*9.8)) P = 4.0087
Como la velocidad angular es casi constante e igual a ω0, la posición angular θ≈ω0t (gráfica inferior)
Estos ejemplos reproducen algunas de las figuras del artículo citado en las referencias
| m1 | m2 | dθ/dt |
|---|---|---|
| 1.0 | 0.365 | 0.6 |
| 0.3 | 1.45 | 1.0 |
| 0.333 | 1.4 | 0.8 |
| 0.157 | 1.0 | 1.15 |
| 0.335 | 1.26 | 0.8 |
| 0.3 | 3.815 | 1.0 |
Actividades
Se introduce
- La masa m1, de la partícula que se mueve en el plano horizontal, en el control titulado Masa m1
- La masa m2, de la partícula que cuelga, en el control titulado Masa m2
- La velocidad angular inicial dθ/dt=ω0, de la primera partícula, en el control titulado Velocidad angular ω0
- La partícula se situa sobre el eje X, θ=0, a una distancia r0=3 del origen, posición en coordenadas polares (3,0). Su velocidad radial inicial dr/dt=0
Se pulsa el botón titulado Nuevo, se dibuja la trayectoria de la partícula sobre el plano horizontal.
En la parte inferior izquierda, se muestra en color rojo el tanto por ciento de error, la cantidad
Donde E0 es la energía inicial y E es la energía en el instante t.
Cuando este cociente es mayor que la unidad, 1% se considera que el programa interactivo no resuelve correctamente el sistema de ecuaciones diferenciales y se detiene.
Se pulsa el botón pausa ||, para parar el movimiento y el botón paso a paso >| para acercarnos al momento en el que el móvil completa una trayectoria y vuelve a repetir el movimiento. De este modo, medimos el periodo. En la parte superior izquierda, se muestra el tiempo y en los ejes, se marca las coordenadas del móvil.
Referencias
William Sacks, Alain Mauger. Two balls and a string: from ordered motion to chaos. Eur. J. Phys. 34 (2013) 1487-1506