

Otras fuerzas centrales inversamente proporcionales al cuadrado de la distancia
La fuerza que describe el movimiento de una vela solar plana, perpendicular a la dirección radial es
Donde λ es un parámetro (lightness number) que depende de la vela y de la radiación solar
Supongamos que manejamos la vela solar de modo que el parámetro λ no es constante sino que depende del ángulo θ, de modo que λ varía entre dos límites
En la página titulada Ecuación de la trayectoria, obtuvimos la ecuación de la trayectoria a partir dela segunda ley de Newton, expresando la aceleración en coordenadas polares, llegando a la siguiente ecuación diferencial
Sustituimos GM por la expresión (1-λ(θ))GM
La solución de la ecuación homogénea es conocida u=Asinθ+Bcosθ
Calculamos la solución particular mediante el procedimiento de Variación de parámetros.
Buscamos una solución particular de la forma
Donde c1 y c2 son funciones de θ
Derivamos con respecto de θ
Tenemos cuatro términos que reducimos a dos, imponiendo la condición de que
Calculamos la derivada segunda con respecto de θ
Introducimos la solución particular up(θ) y sus derivadas en la ecuación diferencial
Como u1(θ) y u2(θ) son soluciones de la ecuación diferencial homogénea, esta expresión se reduce a
Que junto a la condición impuesta al principio, forman un sistema de dos ecuaciones diferenciales de primer orden
Multiplicamos la primera por sinθ y la segunda por cosθ y sumamos
Ya que buscamos la solución particular, aquí no precisamos de la constante de integración
Utilizamos la primera ecuación para calcular c2(θ)
La solución completa de la ecuación diferencial es
Donde A y B se determinan a partir de las condiciones iniciales.
Ejemplo
Supongamos que λ(θ)=cos2θ, de modo que 0≤λ≤1. La solución es
Condiciones iniciales
Supongamos que el cuerpo celeste de masa m describe una órbita circular de radio r0 alrededor del centro de fuerzas fijo de masa M. Por la dinámica del movimiento circular uniforme
Como r=r0 es constante, du/dθ=0, en el instante inicial. Calculamos la derivada de u
La segunda condición inicial es que u=1/r0 para θ=0
Para que du/dθ=0, se deberá cumplir que A=0
La ecuación de la trayectoria es
La ecuación de la trayectoria es
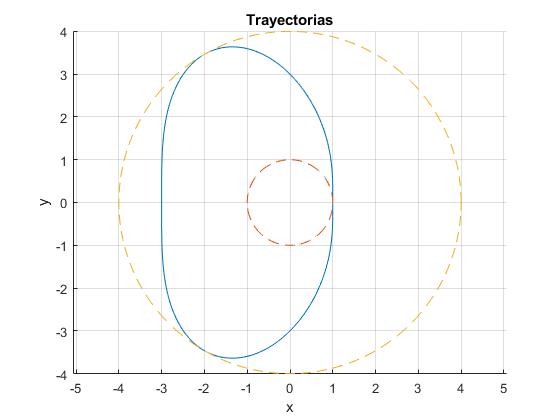
Representamos la trayectoria
r0=1;
r=@(x) 3./(1+cos(x).^2+cos(x));
hold on
fplot(@(x) r(x).*cos(x), @(x) r(x).*sin(x),[0,2*pi])
fplot(@(x) r0*cos(x), @(x) r0*sin(x),[0,2*pi], 'lineStyle','--')
fplot(@(x) 4*r0*cos(x), @(x) 4*r0*sin(x),[0,2*pi], 'lineStyle','--')
hold off
axis equal
xlabel('x')
ylabel('y')
grid on
title('Trayectorias')
Periodo
Dado que la fuerza es central, el momento angular permenece constante. Obtenemos el periodo a partir de la expresión del momento angular en coordenadas polares.
Integramos
Se ha utilizado Math Symbolic de MATLAB para obtener el resultado de la integral definida
>> syms x; >> int(1/(1+cos(x)^2+cos(x))^2,x,0,2*pi) ans =(pi*2^(1/2)*3^(1/4)*(3^(1/2) + 1))/3
Referencias
Colin R. McInnes. Orbits in a Generalized Two-Body Problem. Journal of Guidance, Control and Dynamics, 26 (5) 2003. pp. 743-749. 'https://pure.strath.ac.uk/ws/portalfiles/portal/203650/strathprints006246.pdf'