

Péndulo elástico en un campo magnético uniforme
Vamos a describir el movimiento de una partícula de masa m cargada (positivamente) con q, unida a un muelle elástico de constante k. La partícula se mueve en el seno de un campo magnético uniforme , paralelo al eje vertical Z
A la izquierda, se muestra el muelle de constante k sin deformar cuyo extremo superior es fijo.
El muelle deformado atraviesa un pequeño orificio O situado en un plano horizontal XY. Se sitúa el origen O en el extremo inferior del muelle sin deformar. El eje Z apunta hacia abajo
En el instante t, la posición y velocidad de la partícula
Las fuerzas sobre la partícula son
El peso,
La fuerza que ejerce el muelle deformado, -kr, cuyas componentes son
La fuerza que ejerce el campo magnético
Las ecuaciones del movimiento de la partícula son
Definimos las frecuencias angulares
Las ecuaciones del movimiento se escriben
La tercera ecuacion diferencial es la más fácil de integrar
con la condición inicial: el instante t=0, z(0)=h, y
La solución particular es una constante C, tal que
La solución de la ecuación homogénea es zh=A·cos(ωst)+B·sin(ωst). La solución completa es
Los coeficientes A y B se calculan a partir de las condiciones iniciales
Resolvemos el sistema de dos ecuaciones diferenciales acopladas
Definiendo la variable compleja ξ=x+iy. Multiplicamos la segunda por la unidad imaginaria i y sumamos
Convertimos un sistema de dos ecuaciones diferenciales en una única ecuación diferencial en la variable compleja ξ. Las raíces de la ecuación característica son
La solución de la ecuación diferencial es
Los coeficientes A y B son números complejos. Despejamos la parte real x y la parte imaginaria y
Las componentes vx y vy de la velocidad de la partícula son
Condiciones iniciales
Calculamos los coeficientes A1, A2, B1 y B2, resolviendo el sistema de ecuaciones
La trayectoria de la partícula en el plano XY es
Llamamos
Dado el campo magnético B, calculamos ωm y ωms y posteriormente, n. Sin embargo, es más interesante fijar el valor de n y después, calcular el campo magnético B correspondiente a dicho valor
Datos
- Masa de la partícula, m=0.02 kg
- Carga de la partícula, q=0.1 C
- Constante elástica del muelle, k=0.5 N/m
- Velocidad inicial, v0y=V=0.8 m/s
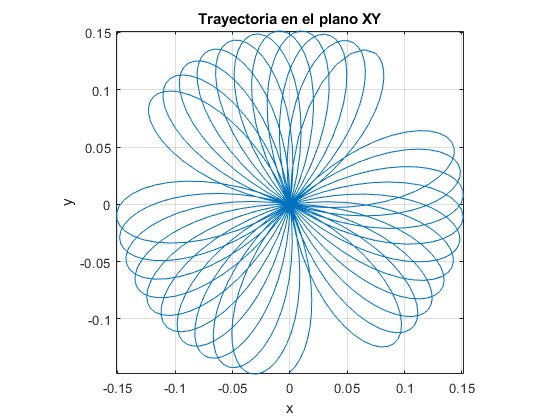
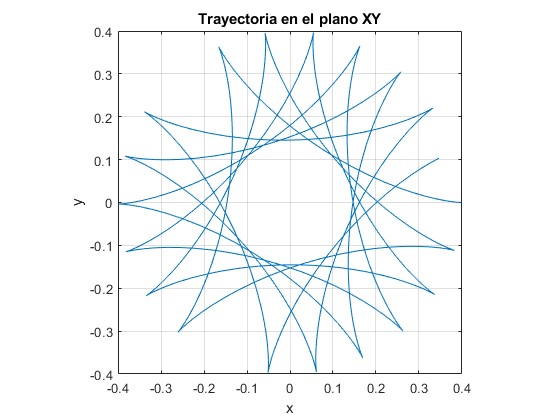
Ejemplo 1. n=5
m=0.02; %masa
k=0.5; %constante del muelle
q=0.1; %carga
V=0.8; %velocidad inicial
n=5;
w_s=sqrt(k/m);
B=2*m*w_s/(q*sqrt(n^2-1)); %campo magnético
w_m=q*B/(2*m);
w_ms=sqrt(w_s^2+w_m^2);
a=V/w_ms;
fplot(@(th) a*sin(n*th).*sin(th), @(th) a*sin(n*th).*cos(th),[0,2*pi])
grid on
axis equal
xlabel('x')
ylabel('y')
title('Trayectoria en el plano XY')
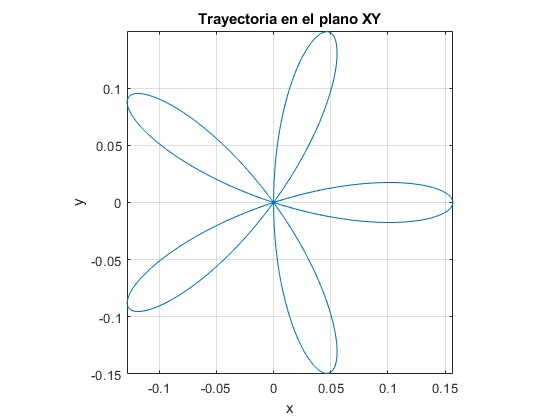
Con estos datos, para n=5,
>> B B = 0.4082
Ejemplo 2. n=4
En el script modificamos el valos de la variable
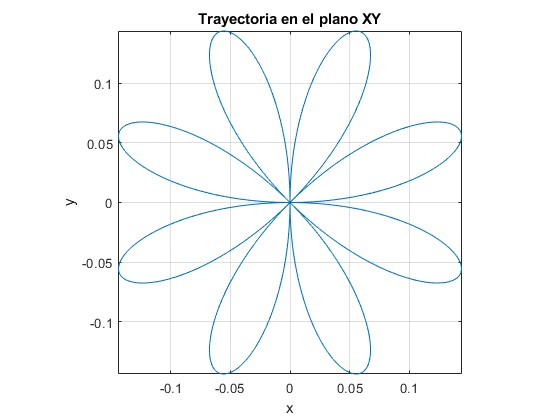
>> B B = 0.5164
Ejemplo 3. n=π
En el script modificamos el valor de la variable
>> B B = 0.6715
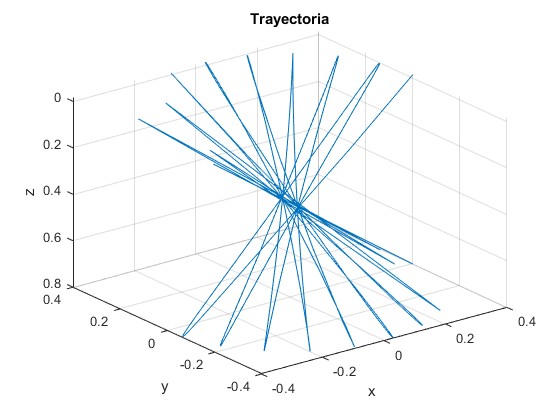
Ejemplo 4. Representamos la trayectoria de la partícula en el espacio
Las ecuaciones paramétricas de la trayectoria son
m=0.02; %masa
k=0.5; %constante del muelle
q=0.1; %carga
V=0.8; %velocidad inicial
n=3;
h=0.8; %altura inicial
w_s=sqrt(k/m);
B=2*m*w_s/(q*sqrt(n^2-1)); %campo magnético
w_m=q*B/(2*m);
w_ms=sqrt(w_s^2+w_m^2);
a=V/w_ms;
fplot3(@(th) a*sin(n*th).*sin(th), @(th) a*sin(n*th).*cos(th),
@(th) 9.8/w_s^2+(h-9.8/w_s^2)*cos(th*sqrt(n^2-1)),[0,2*pi])
grid on
set(gca,'Zdir','reverse')
xlabel('x')
ylabel('y')
xlabel('x')
zlabel('z')
title('Trayectoria')
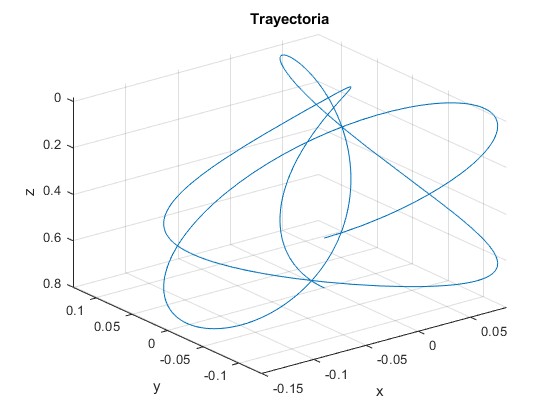
Con estos datos, para n=3,
>> B B = 0.7071
Condiciones iniciales
Calculamos los coeficientes A1, A2, B1 y B2, resolviendo el sistema de ecuaciones
La trayectoria de la partícula en el plano XY es
Llamamos
Fijado el valor de n calculamos el campo magnético B correspondiente a dicho valor
Datos
- Masa de la partícula, m=0.02 kg
- Carga de la partícula, q=0.1 C
- Constante elástica del muelle, k=0.5 N/m
- Posición inicial, x0=L=0.4 m
Ejemplo 1. n=4
m=0.02; %masa
k=0.5; %constante del muelle
q=0.1; %carga
L=0.4; %posición inicial
n=4;
w_s=sqrt(k/m);
B=m*(n-2)*w_s/(q*sqrt(n-1));
w_m=q*B/(2*m);
w_ms=sqrt(w_s^2+w_m^2);
r=L*(w_ms-w_m)/(2*w_ms);
fplot(@(th) r*(n-1)*cos(th)+r*cos((n-1)*th),
@(th) r*(n-1)*sin(th)-r*sin((n-1)*th),[0,2*pi])
grid on
axis equal
xlabel('x')
ylabel('y')
title('Trayectoria en el plano XY')
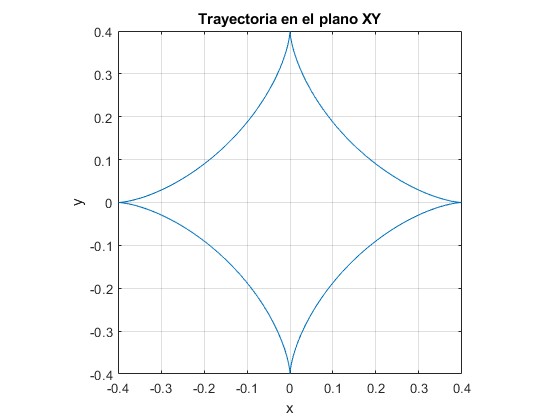
Con estos datos, para n=4,
>> B B = 1.1547
Ejemplo 2. n=9/2
En el script modificamos el valos de la variable
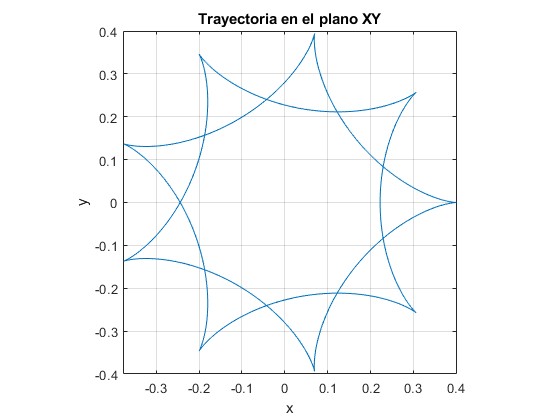
Con estos datos, para n=9/2,
>> B B = 1.3363
Ejemplo 3. n=π
En el script modificamos el valor de la variable
Con estos datos, para n=π,
>> B B = 0.7801
Ejemplo 4. Representamos la trayectoria de la partícula en el espacio
Tenemos que expresar ωst en términos de n y θ. Establecimos la relación
Las ecuaciones paramétricas de la trayectoria son
m=0.02; %masa
k=0.5; %constante del muelle
q=0.1; %carga
L=0.4; %posición inicial x
n=2.1;
h=0.8; %altura inicial
w_s=sqrt(k/m);
B=m*(n-2)*w_s/(q*sqrt(n-1));
w_m=q*B/(2*m);
w_ms=sqrt(w_s^2+w_m^2);
r=L*(w_ms-w_m)/(2*w_ms);
fplot3(@(th) r*(n-1)*cos(th)+r*cos((n-1)*th), @(th) r*(n-1)*sin(th)-
r*sin((n-1)*th),@(th) 9.8/w_s^2+(h-9.8/w_s^2)*cos(th*sqrt(n-1)),[0,20*pi])
grid on
grid on
set(gca,'Zdir','reverse')
xlabel('x')
ylabel('y')
xlabel('x')
zlabel('z')
title('Trayectoria')
>> B B = 0.0953
Referencias
MENG Yong. Motion analysis of spring pendulum in uniform magnetic field. College Physics. 2023, 42 (1)