

La función error
La función error erf se define del siguiente modo:
Llamamos a la función erf de MATLAB para representar gráficamente la función error.
fplot(@erf,[-2,2])
xlabel('x')
ylabel('erf(x)')
title('Función error')
grid on
Alternativamente
>> syms x; >> ezplot(erf(x), [-2, 2]) >> grid on;
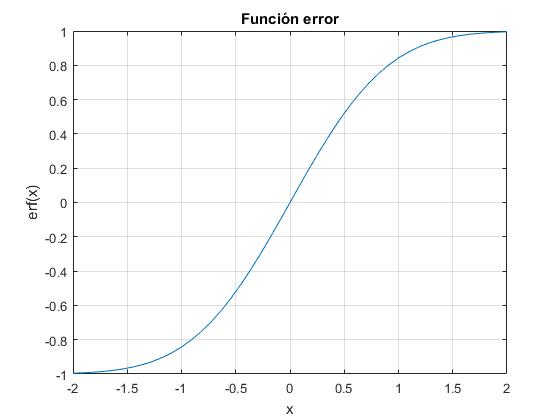
Esta función tiende asintóticamente a 1 cuando x se hace grande, ya que
>> syms t; >> y=exp(-t^2); >> int(y,0,inf) ans =pi^(1/2)/2
entonces, erf(∞)=1.
Fuerza descrita por una función de Gauss
Supongamos una partícula de masa m que se mueve a lo largo del eje X bajo la acción de una fuerza F(t) que depende del tiempo de la forma
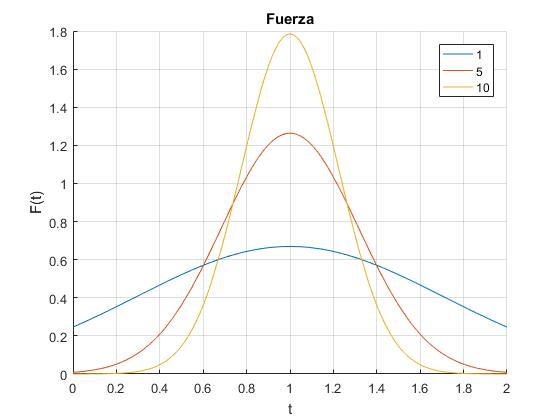
Esta función tiende a cero cuando t→±∞ y presenta un máximo en t=t0, cuya altura es F0. α es un parámetro que controla la anchura del pico.
Una fuerza que actúa durante un tiempo 2t0 produce un impulso.
Hacemos el cambio
Expresamos la fuerza F(t) en términos del impulso I en vez del máximo F0
Representamos F(t) para tres valores del parámetro α: 1, 5, 10. El área bajo las curvas en el intervalo (0, 2t0) es el impulso I cuyo valor es la unidad
t0=1; %posición del pico
I=1; %impulso
hold on
for alfa=[1,5,10]
F=@(t) I*sqrt(alfa/pi)*exp(-alfa*(t-t0).^2)/erf(sqrt(alfa)*t0);
fplot(F,[0,2*t0],'displayName',num2str(alfa))
end
title('Fuerza')
xlabel('t')
ylabel('F(t)')
legend('-DynamicLegend','location','northeast')
grid on
hold off
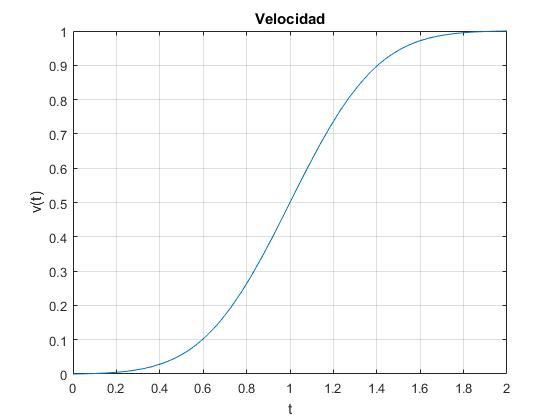
La aceleración a(t) es el cociente entre la fuerza F(t) y la masa m de la partícula. Integrando con respecto del tiempo, obtenemos la velocidad v(t). Supondremos que en el instante t=0, la partícula parte del reposo, v=0.
Representamos la velocidad en función del tiempo, para el valor del parámetro α=5
t0=1; %posición del pico
I=1; %impulso
alfa=5; %parámetro
v=@(t) (I/2)*(1+erf(sqrt(alfa)*(t-t0))/erf(sqrt(alfa)*t0));
fplot(v,[0,2*t0])
title('Velocidad')
xlabel('t')
ylabel('v(t)')
grid on
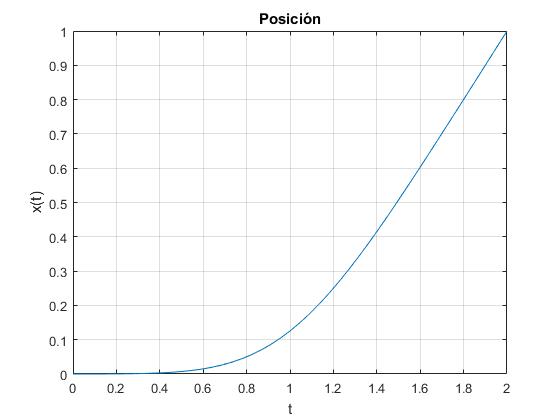
Dada la velocidad v(t) obtenemos la posición del móvil x(t) integrando respecto del tiempo. Supondremos que en el instante t=0, el cuerpo parte del origen, x=0.
Primero, integramos por partes la función error
>> syms x; >> int(erf(x)) ans =exp(-x^2)/pi^(1/2) + x*erf(x)
Utilizamos este resultado para obtener la posición del móvil en función del tiempo
Representamos la posición del móvil en función del tiempo, para el valor del parámetro α=5
t0=1; %posición del pico
I=1; %impulso
alfa=5; %parámetro
x=@(t) (I/2)*(t+((t-t0).*erf(sqrt(alfa)*(t-t0))+exp(-alfa*(t-t0).^2)
/sqrt(pi*alfa)-t0*erf(sqrt(alfa)*t0)-exp(-alfa*t0^2)/sqrt(pi*alfa))
/erf(sqrt(alfa)*t0));
fplot(x,[0,2*t0])
title('Posición')
xlabel('t')
ylabel('x(t)')
grid on
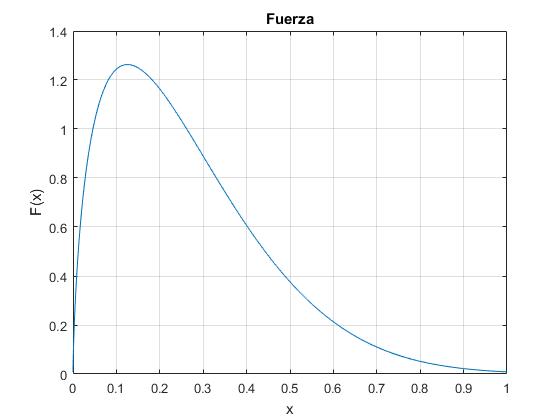
Representamos la fuerza F(x) en función de la posición del móvil, para el valor del parámetro α=5
t0=1; %posición del pico
I=1; %impulso
alfa=5; %parámetro
F=@(t) I*sqrt(alfa/pi)*exp(-alfa*(t-t0).^2)/erf(sqrt(alfa)*t0);
x=@(t) (I/2)*(t+((t-t0).*erf(sqrt(alfa)*(t-t0))+exp(-alfa*(t-t0).^2)
/sqrt(pi*alfa)-t0*erf(sqrt(alfa)*t0)-exp(-alfa*t0^2)/sqrt(pi*alfa))
/erf(sqrt(alfa)*t0));
t=linspace(0,2*t0,100);
plot(x(t),F(t))
title('Fuerza')
xlabel('x')
ylabel('F(x)')
grid on
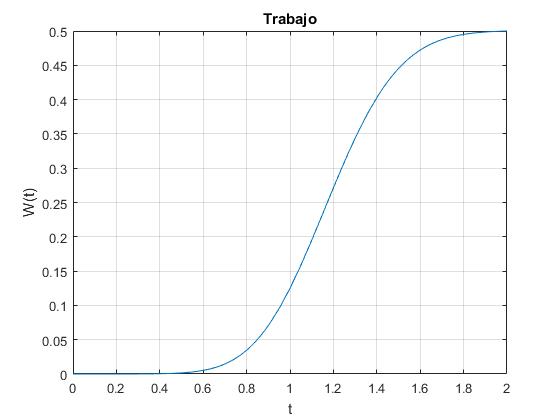
El trabajo realizado por la fuerza F(t) desde el instante t=0 al instante t, es igual a la energía cinética de la partícula que parte del reposo
t0=1; %posición del pico
I=1; %impulso
alfa=5; %parámetro
v=@(t) (I/2)*(1+erf(sqrt(alfa)*(t-t0))/erf(sqrt(alfa)*t0));
W=@(t) v(t).^2/2;
fplot(W,[0,2*t0])
title('Trabajo')
xlabel('t')
ylabel('W(t)')
grid on
Referencias
S K Foong. Work done by a Gaussian impulse. Eur. J. Phys. 31 (2010) pp. 543-550