

Un doble cono que asciende rodando sin deslizar
Los dos raíles están situados en un plano que forma un ángulo θ con el plano horiozontal. No son paralelos sino que se cortan en el origen formando un ángulo 2β
Para determinar la posición del centro de masas del doble cono, se estable en sistema de referencia XY en el plano vertical, bisetriz de las dos raíles.
El doble cono, está formado por dos conos iguales unidos por sus bases. Tiene un radio R en la base y forma un ángulo α con el eje. Cuando se apoya en los dos raíles, la distancia entre el eje y el punto de contacto es r tal como se muestra en la figura más abajo.
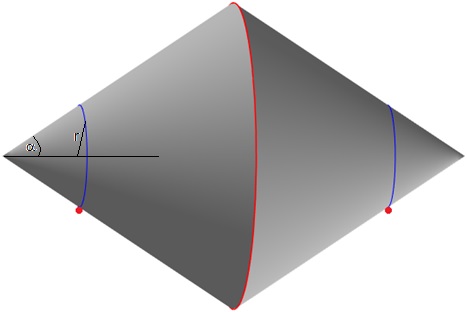
El código para representar el doble cono es
theta=pi/3; r=linspace(0,1,30); phi=linspace(0,2*pi,30); [r,phi]=meshgrid(r,phi); x=r.*cos(phi)*sin(theta); y=r.*sin(phi)*sin(theta); z=r*cos(theta); hold on surfl(x,y,z); surfl(x,y,cos(theta)+fliplr(z)); fplot3(@(t) sin(theta)*cos(t), @(t) sin(theta)*sin(t), @(t) cos(theta), [0,2*pi], 'lineWidth', 1.2, 'color','r') fplot3(@(t) sin(theta)*cos(t)/3, @(t) sin(theta)*sin(t)/3, @(t) cos(theta)/3, [0,2*pi], 'color','b') fplot3(@(t) sin(theta)*cos(t)/3, @(t) sin(theta)*sin(t)/3, @(t) 5*cos(theta)/3, [0,2*pi], 'color','b') hold off shading interp colormap(gray); axis off view (0,17)
Posición del centro de masas
La proyección del doble cono sobre el plano bisetriz XY se muestra en la figura
Sabiendo que q es la distancia del punto P al origen. La posición del centro de masas del doble cono es
La relación entre q y r se establece en la siguiente figura
La relación entre las coordenadas x e y del centro de masas es la siguiente
Se trata de la ecuación de una recta de pendiente
Consideraremos dos casos
La pendiente es negativa m<0, cuando
La pendiente es nula m=0, cuando
Denominaremos
La relación entre q y r se escribe
Si el doble cono rueda sin deslizar, existe una relación entre el desplazamiento lineal, dq y el angulo girado, dφ
Integramos con las siguientes condiciones q=0, para φ=0
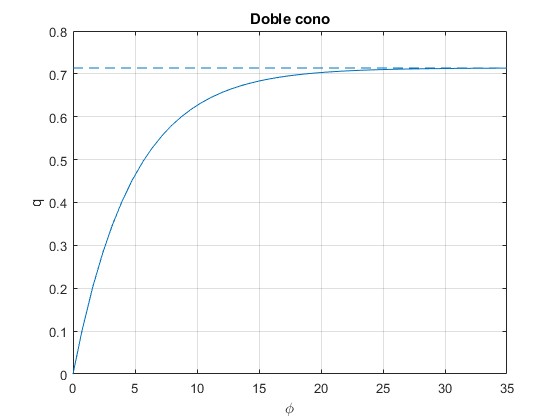
Cuando el ángulo girado φ se hace grande q→R/k, r→0
Representamos q en función del ángulo girado φ para
- Angulo del doble cono, α=30°
- Radio de la base del cono, R=0.15 m
- Angulo mitad entre los raíles, β=20°
alfa=pi/6;
beta=20*pi/180;
R=0.15;
k=tan(alfa)*tan(beta);
fplot(@(x) R*(1-exp(-k*x))/k,[0,35])
line([0,35],[R/k,R/k],'lineStyle','--')
grid on
ylim([0,0.8])
xlabel('\phi')
ylabel('q');
title('Doble cono')
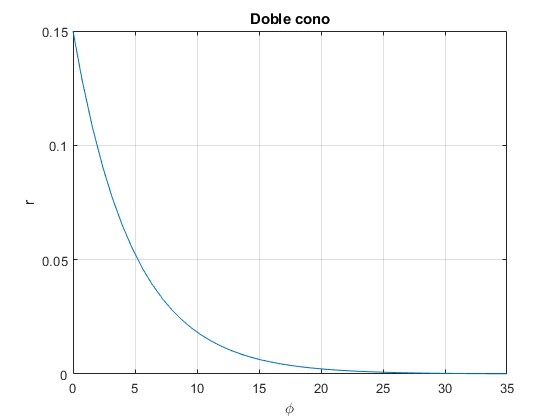
Representamos r en función del ángulo girado φ para los mismos datos
alfa=pi/6;
beta=20*pi/180;
R=0.15;
k=tan(alfa)*tan(beta);
fplot(@(x) R*exp(-k*x),[0,35])
grid on
xlabel('\phi')
ylabel('r');
title('Doble cono')
Expresamos la posición del centro de masas del cono (x,y) en términos del ángulo girado φ
Conservación de la energía
La energía cinética del doble cono es la suma de la energía cinética de traslación del centro de masas y la de rotación alrededor del eje que pasa por el centro de masas. El momento de inercia del doble cono respecto del eje que pasa por los vértices es I=3MR2/10
Las componentes de la velocidad del centro de masas son
La energía cinética es
La energía potencial
La energía es constante e igual a la inicial E0
Ecuación del movimiento
La Lagrangiana es
La ecuación del movimiento
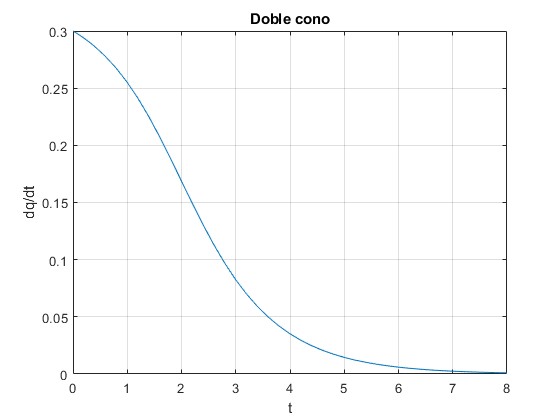
Pendiente nula, m=0
La pendiente es nula m=0, cuando , o bien, tanθ=k
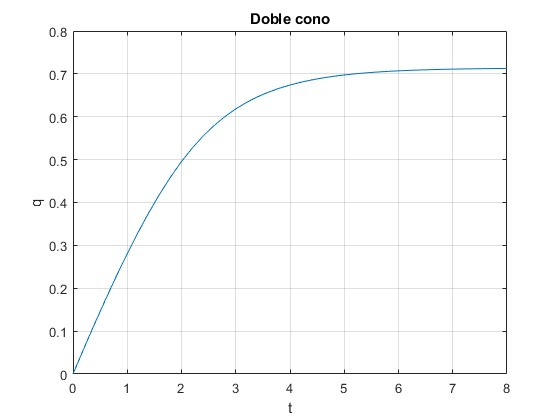
Representamos la distancia q al origen en función del tiempo, con las condiciones iniciales siguientes, para t=0, q=0 y dq/dt=0.3 m/s. Se lanza desde el origen con una velocidad inicial
Teniendo en cuenta la relación entre la distancia q y el ángulo girado φ
Para q0=0, φ0=0. Para (dq/dt)0=0.3, (dφ/dt)0=0.3/R. Los datos son
- Angulo del doble cono, α=30°
- Radio de la base del cono, R=0.15 m
- Angulo mitad entre los raíles, β=20°
- Inclinación, θ=arctank
alfa=pi/6;
beta=20*pi/180;
R=0.15; %radio
k=tan(beta)*tan(alfa);
theta=atan(k);
f=@(t,x) [x(2); ((9.8/R)*(k*cos(theta)-sin(theta))*exp(-k*x(1))+
(1+k^2)*k*exp(-2*k*x(1))*x(2)^2)/((1+k^2)*exp(-2*k*x(1))+3/10)];
[t,x]=ode45(f,[0,8],[0,0.3/R]);
q=R*(1-exp(-k*x(:,1)))/k;
plot(t,q)
grid on
xlabel('t')
ylabel('q');
title('Doble cono')
E0=R^2*(13/10+k^2)*(0.3/R)^2/2+9.8*R*cos(theta);
E=R^2*((1+k^2)*exp(-2*k*x(:,1))+3/10).*x(:,2).^2/2+9.8*R*(sin(theta)/k+
(cos(theta)-sin(theta)/k)*exp(-k*x(:,1)));
disp(E0)
disp(E)
Comprobamos que la energía E se mantiene constante e igual a la inicial E0
1.4991
1.4991
1.4991
....
1.4991
Representamos la velocidad dq/dt en función del tiempo t
alfa=pi/6;
beta=20*pi/180;
R=0.15; %radio
k=tan(beta)*tan(alfa);
theta=atan(k);
f=@(t,x) [x(2); ((9.8/R)*(k*cos(theta)-sin(theta))*exp(-k*x(1))+
(1+k^2)*k*exp(-2*k*x(1))*x(2)^2)/((1+k^2)*exp(-2*k*x(1))+3/10)];
[t,x]=ode45(f,[0,8],[0,0.3/R]);
dq=R*exp(-k*x(:,1)).*x(:,2);
plot(t,dq)
grid on
xlabel('t')
ylabel('dq/dt');
title('Doble cono')
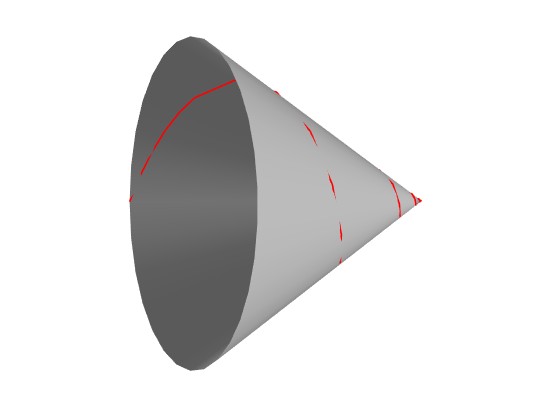
Representamos en color rojo, la sucesión de puntos de contacto de un cono con el raíl
La distancia r del punto de contacto al eje del cono es
La distancia z a lo largo del eje del cono (desde la base) es
alfa=pi/6; beta=20*pi/180; R=0.15; %radio k=tan(beta)*tan(alfa); theta=atan(k); f=@(t,x) [x(2); ((9.8/R)*(k*cos(theta)-sin(theta))*exp(-k*x(1))+ (1+k^2)*k*exp(-2*k*x(1))*x(2)^2)/((1+k^2)*exp(-2*k*x(1))+3/10)]; [t,x]=ode45(f,[0,8],[0,0.3/R]); r=R*exp(-k*x(:,1)); q=R*(1-exp(-k*x(:,1)))/k; z=q*tan(beta); %cono rr=linspace(0,R/sin(alfa),30); xi=linspace(0,2*pi,30); [rr,xi]=meshgrid(rr,xi); X=rr.*cos(xi)*sin(alfa); Y=rr.*sin(xi)*sin(alfa); Z=rr*cos(alfa); hold on surfl(X,Z,Y); plot3(r.*cos(x(:,1)), R/tan(alfa)-z, r.*sin(x(:,1)), 'lineWidth',1.2,'color','r') hold off shading interp colormap(gray); axis off view (-123,1)
Pendiente negativa, m<0
La pendiente es negativa m<0, cuando , o bien, tanθ<k
Representamos la distancia q al origen en función del tiempo, con las condiciones iniciales siguientes, para t=0, q=0.99R/k y dq/dt=-0.022 m/s. Se lanza desde lejos hacia el origen y luego, regresa
Teniendo en cuenta la relación entre la distancia q y el ángulo girado φ
Para q0=0.99R/k, φ0=-ln(0.01)/k. Para (dq/dt)0=-0.022, (dφ/dt)0=-0.022/(R·exp(-kφ0)). Los datos son
- Angulo del doble cono, α=30°
- Radio de la base del cono, R=0.15 m
- Angulo mitad entre los raíles, β=20°
- Inclinación, θ=arctan(k)/2
alfa=pi/6;
beta=20*pi/180;
R=0.15; %radio
k=tan(beta)*tan(alfa);
theta=atan(k)/2;
f=@(t,x) [x(2); ((9.8/R)*(k*cos(theta)-sin(theta))*exp(-k*x(1))+
(1+k^2)*k*exp(-2*k*x(1))*x(2)^2)/((1+k^2)*exp(-2*k*x(1))+3/10)];
phi_0=-log(0.01)/k;
dphi_0=-0.022/(R*exp(-k*phi_0));
[t,x]=ode45(f,[0,6],[phi_0, dphi_0]);
q=R*(1-exp(-k*x(:,1)))/k;
plot(t,q)
grid on
xlabel('t')
ylabel('q');
title('Cono doble')
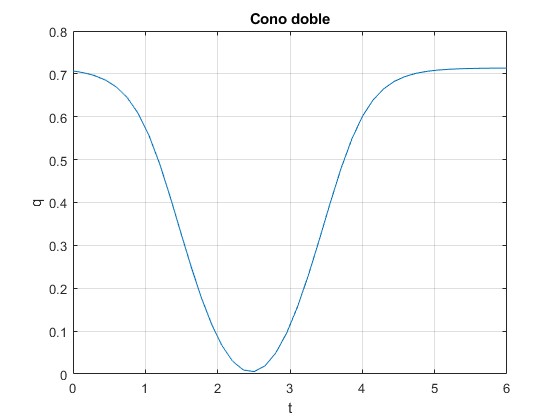
El doble cono se dirige hacia el origen, disminuyendo su velocidad, llega a la posición donde su velocidad nula y regresa, incrementando su velocidad.
Representamos la velocidad dq/dt en función del tiempo t
alfa=pi/6;
beta=20*pi/180;
R=0.15; %radio
k=tan(beta)*tan(alfa);
theta=atan(k)/2;
f=@(t,x) [x(2); ((9.8/R)*(k*cos(theta)-sin(theta))*exp(-k*x(1))+
(1+k^2)*k*exp(-2*k*x(1))*x(2)^2)/((1+k^2)*exp(-2*k*x(1))+3/10)];
phi_0=-log(0.01)/k;
dphi_0=-0.022/(R*exp(-k*phi_0));
[t,x]=ode45(f,[0,6],[phi_0, dphi_0]);
% q=R*(1-exp(-k*x(:,1)))/k;
dq=R*exp(-k*x(:,1)).*x(:,2);
plot(t,dq)
grid on
xlabel('t')
ylabel('dq/dt');
title('Cono doble')
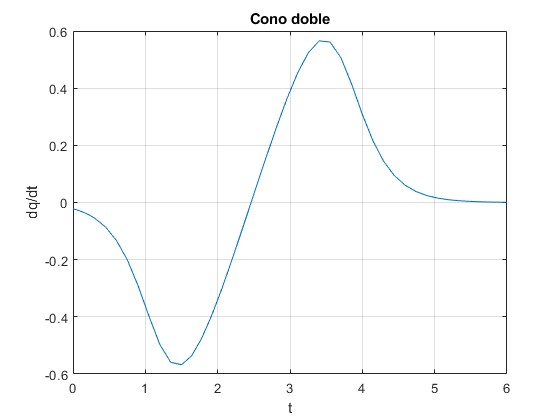
La velocidad se anula, en el instante t en el que q es mínimo
Referencias
Emilio Cortés, D Cortés-Poza. Mechanical paradox: the uphill roller. Eur. J. Phys. 32 (2011) pp. 1559–1576