

Oscilaciones de una barra apoyada en una semiesfera
Sea una barra de masa m, longitud l y anchura δ, se coloca simétricamente sobre una cúpula de forma semiesférica de radio R. El punto B de la barra coincide con el punto A del vértice de la semiesfera cuando la barra parte de la posición horizontal de equilibrio, θ=0
La barra se desplaza un ángulo θ, la barra es tangente a la semicircunferencia en P, la distancia BP es el arco de circunferencia AP=Rθ
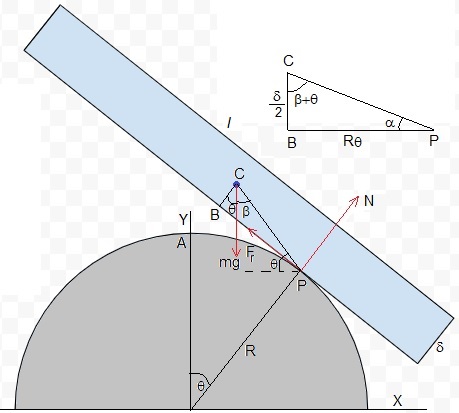
La posición del punto B es,
xB=Rsinθ-BP·cosθ=R(sinth-θ·cosθ),
yB=Rcosθ+BP·sinθ=R(cosθ+θ·sinθ)
La posición del centro de masas C es,
xC=xB+(δ/2)sinθ=R(sinθ-θ·cosθ)+(δ/2)sinθ
yC=yB+(δ/2)cosθ=R(cosθ+θ·sinθ)+(δ/2)cosθ
La velocidad del centro de masas es
Fuerzas
Las fuerzas que actúan sobre la barra son:
el peso, mg en el centro de masa
La reacción N y la fuerza de rozamiento Fr en el punto de contacto P
Sea μs el coeficiente estático de la fuerza de rozamiento entre el cuerpo de masa m y el plano inclinado de ángulo θ.
El cuerpo empieza a deslizar cuando la componente del peso a lo largo del plano inclinado mgsinθ se hace igual o mayor que máximo valor de la fuerza de rozamiento μsN. El ángulo límite del plano inclinado es, mgsinθ=μsmgcosθ. Simplificando, tanθl=μs.
Si θ≥θl el cuerpo desliza, en caso contrario permenece en reposo
A partir del ángulo θl la barra desliza a lo largo de la cúpula semiesférica
En esta página, supondremos que el coeficiente estático μs es suficientemente grande para que la barra no deslice durante su movimiento oscilatorio
Momento
El peso mg ejerce un momento respecto del punto de contacto P, que hace que la barra retorne a la posición de equilibrio θ=0
M=mg·PC·sinβ.
En el triángulo rectángulo PBC relacionamos los ángulos α, β y θ. β=π/2-α-θ
M=mg·PC·cos(α+θ)=mg(PC·cosα·cosθ-PC·sinα·sinθ)=mg(Rθ·cosθ-(δ/2)sinθ).
El momento es nulo cuando θ=0, en la posición de equilibrio y vuelve a ser nulo cuando el centro de masas C está encima del punto de contacto P, es decir, cuando xC=xP
R(sinθ-θ·cosθ)+(δ/2)sinθ=Rsinθ
-Rθcosθ+(δ/2)sinθ=0
(δ/2)tanθ=Rθ
Representamos
para un radio de la cúpula R=3.5 cm, y para una anchura de la barra δ=1 cm, lo que determina el valor del parámetro adimensional, k=7
R=0.035; %radio de la cúpula semiesférica
delta=0.01; %anchura de la barra
k=R/(delta/2); %parámetro
f=@(x) k*x.*cos(x)-sin(x);
fplot(f,[0,pi/2])
th_m=fzero(f,[0.1,pi/2]); %ángulo, momento nulo
line([th_m,th_m],[-1,0],'lineStyle','--','color','k')
set(gca,'XTick',0:pi/12:pi/2)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
xlabel('\theta')
ylabel('M')
title('Momento del peso')
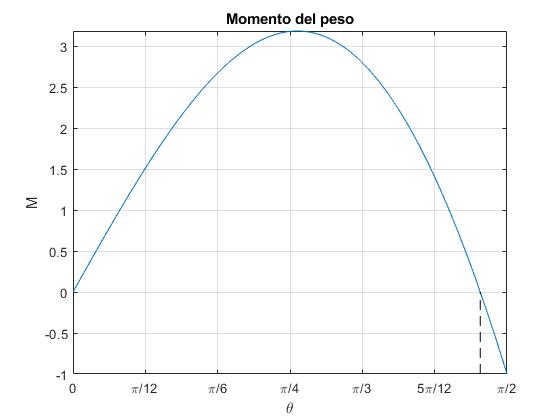
>> th_m*180/pi ans = 84.4650
En la figura, señalamos el ángulo θm=84.5° para el cual el momento M es nulo. Para ello resolvemos la ecuación transcendente kθ·cosθ-sinθ=0, utilizando la función
Energía potencial
Establecemos el nivel cero de energía potencial en la posición del centro de masas, cuando la barra está en equilibrio, θ=0, xC=0, yC=R+δ/2
Ep(θ)=mgyC-mg(R+δ/2)=mg(R(cosθ+θ·sinθ)+(δ/2)cosθ)-mg(R+δ/2)
La energía potencial presenta un máximo
para el mismo ángulo θm que hace que el momento sea nulo
Representamos la energía potencial para varios valores del parámetro k
hold on
for k=[10,5,4,3,2,1.5] %parámetro
f=@(x) k*(x.*sin(x)+cos(x)-1)+cos(x)-1;
fplot(f,[0,pi/2])
th_m=fzero(@(x) k*x*cos(x)-sin(x),[0.1,pi/2]);
plot(th_m,f(th_m),'o','markersize',3,'markeredgecolor','r',
'markerfacecolor','r')
end
hold off
set(gca,'XTick',0:pi/12:pi/2)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
xlabel('\theta')
ylabel('E_p(\theta)')
title('Energía potencial')
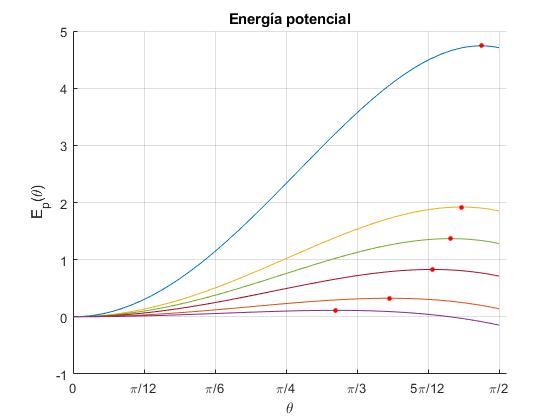
Un punto de color rojo señala el máximo de la energía potencial, Ep(θ)
Energía cinética
La energía cinética de la barra es la suma de la energía cinética de traslación del centro de masas y de rotación alrededor de un eje perpendicular al plano de la figura y que pasa por el c.m.
Se trata de un sistema conservativo, la energía permanece constante
El momento de inercia Ic=ml2/12, de una varilla respecto de un eje perpendicular a la misma y que pasa por el centro de masas
Descripción cualitativa del movimiento
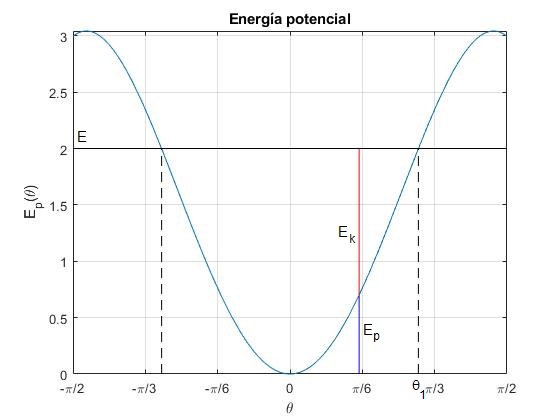
Representamos la energía potencial Ep(θ), para el valor del parámetro k=7. Sea E=2 la energía total en unidades mgδ/2, menor que el máximo de la energía potencial. La barra oscila entre dos posiciones extremas θ1 y -θ1.
Para una posición θ=0.5 rad, el segmento de color azul señala la energía potencial y el rojo la energía cinética. A medida que se desplaza hacia la derecha la energía potencial aumenta y la cinética disminuye, hasta que en la posición de retorno θ1 la velocidad angular dθ/dt se hace nula
k=7; %parámetro
f=@(x) k*(x.*sin(x)+cos(x)-1)+cos(x)-1;
fplot(f,[-pi/2,pi/2])
E=2; %energía total
g=@(x) f(x)-E;
th_1=fzero(g,[0.1,pi/2]);
line([-pi/2,pi/2],[f(th_1),f(th_1)],'color','k')
line([-th_1,-th_1],[0,f(th_1)],'color','k','lineStyle','--')
line([th_1,th_1],[0,f(th_1)],'color','k','lineStyle','--')
th=0.5;
line([th,th],[0,f(th)],'color','b') %energía potencial
line([th,th],[f(th),E],'color','r') %energía cinética
set(gca,'XTick',-pi/2:pi/6:pi/2)
set(gca,'XTickLabel',{'-\pi/2','-\pi/3','-\pi/6', '0','\pi/6','\pi/3','\pi/2'})
grid on
xlabel('\theta')
ylabel('E_p(\theta)')
title('Energía potencial')
Ecuación del movimiento
La lagrangiana L=Ek-Ep(θ) es
La ecuación del movimiento
Resolvemos la ecuación diferencial del movimiento por procedimientos numéricos con las siguientes condiciones iniciales: en el instante t=0, θ=θ0, (dθ/dt)0=0. Parte del resposo desde la posición angular θ0
- Longitud de la barra, l=20 cm
- Anchura de la barra, δ=1 cm
- Radio de la cúpula semiesférica, R=3.5 cm
Con estos datos determinamos el valor del parámetro k=R/(δ/2)=7
L=0.2; %longitud barra
R=0.035; %radio cúpula semiesférica
delta=0.01; %abchura de la barra
k=R/(delta/2); %parámetro
k2=L^2/(delta/2)^2;
k3=9.8/(delta/2);
f=@(t,x) [x(2); -(k^2*x(1)*x(2)^2+k3*(k*x(1)*cos(x(1))-sin(x(1))))
/(k^2*x(1)^2+1+k2/12)];
[t,x]=ode45(f,[0,5],[1,0]);
plot(t, x(:,1))
set(gca,'YTick',-pi/3:pi/12:pi/3)
set(gca,'YTickLabel',{'-\pi/3','-\pi/4','-\pi/6','-\pi/12' '0','\pi/12',
'\pi/6','\pi/4','\pi/3'})
grid on
xlabel('t')
ylabel('\theta')
title('Movimiento de la barra')
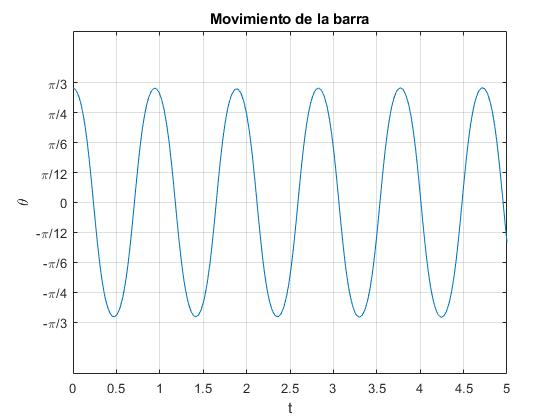
El periodo de las oscilaciones depende de la amplitud, como puede comprobarse, cambiando el ángulo inicial θ0
Actividades
Se introduce
- El valor del parámetro k=R/(δ/2), en el control titulado Constante
- La posición inicial θ0 de la barra (parte del reposo), en el control titulado Posición inicial
- La longitud de la barra se ha fijado en, l=20 cm
- El radio de la cúpula semiesférica se ha fijado en, R=3.5 cm
Se pulsa el botón titulado Nuevo. El ángulo inicial θ0 tiene que ser menor que el ángulo θm del máximo de la energía potencial Ep(θ) o del ángulo para el cual el momento del peso mg respecto del punto P de contacto es nulo.
En el caso de que sea mayor, el programa interactivo se detiene y un mensaje nos invita a modificar los datos de entrada
Observamos el movimiento de la barra sobre la cúpula semiesférica, en la parte superior derecha se proporcionan los datos de
- el tiempo, t
- la posicón angular θ en grados
- la velocidad angular dθ/dt en rad/s
Con la ayuda de los botones Pausa y Paso se puede medir el periodo de la oscilación
El programa calcula en cada instante el tanto por ciento de error relativo en la energía o el cociente
donde E es la energía del sistema en cualquier instante t, y E0 es la energía inicial del sistema.
Este valor se proporciona en caracteres de color rojo. Su valor debe ser siempre cero, o un valor muy pequeño lo que indica que la energía del sistema permanece constante y el programa realiza los cálculos correctamente.
Referencias
M. A. F. Gomes, Wm. R. Savage, Anderson S. L. Gomes. Local stability: An elementary demostration and discussion. Am. J. Phys. 51 (7) July 1983, pp. 636-641