

Trayectoria de la bola en la bolera americana
Sea una bola de masa m, radio R y momento de inercia, Ic=2mR2/5. En un instante dado t, el punto de contacto P de la esfera con la pista se encuentra en la posición (x, y). La velocidad del centro de masas es , y la velocidad angular de rotación alrededor de un eje que pasa por el centro de masas.
La velocidad del punto P de contacto de la bola con la pista es
Ecuaciones del movimiento
Las fuerzas sobre la bola son:
- El peso, mg
- La reacción de la pista, N
- La fuerza de rozamiento en el punto de contacto P, cuyo valor y dirección en el plano son desconocidos
Sean Fx y Fy las componentes de esta fuerza
Las ecuaciones del movimiento son
Ecuación del movimiento de traslación del centro de masas
Ecuación del movimiento de rotación alrededor de un eje que pasa por el centro de masas
La componente ωz de la velocidad angular permanece constante
Relacionamos las componentes de la velocidad del centro de masas con las componentes de la velocidad angular de rotación. Teniendo en cuenta que el momento de inercia Ic=2mR2/5.
Hemos calculado las componentes de la velocidad del punto P de contacto con la pista, derivando con respecto del tiempo
Cuando el punto P desliza sobre la pista, la fuerza de rozamiento es de signo contrario a la velocidad del punto P y vale, , siendo μ el coeficiente cinético y el vector unitario en la dirección de la velocidad del punto de contacto P. Las ecuaciones son
La ecuación de una línea recta de pendiente m que pasa por el origen es y=mx, dy=m·dx, o bien dy/y=dx/x.
Las componentes de la velocidad del punto de contacto P están relacionadas, vx=cvy, donde la constante c se determina a partir de las condiciones iniciales , en el intente t=0, la velocidad del centro de masas es (V0x, V0y) y la velocidad angular de rotación (ω0x, ω0y)
Integramos la primera ecuación diferencial, sustituyendon vx=c·vy
Integramos la segunda ecuación diferencial, de forma similar
La velocidad del punto P de contacto se anula cuando vx y vy se anulen simultáneamente, en el instante t tal que
Elevando al cuadrado y sumando
A partir de este instante, la bola rueda sin deslizar
Movimiento del centro de masas
La recta Y' es la dirección constante de la velocidad del punto P y por tanto, de la fuerza de rozamiento. forma un ángulo c=tanθ con el eje Y
Establecemos un sistema de coordenadas X',Y' giradas un ángulo θ respecto de X,Y , tal como se muestra en la figura. El movimiento del centro de masas de la bola es composición de dos movimientos: uniforme a lo largo del eje X' y uniformemente acelerado a lo largo del eje Y'
La posición y velocidad del centro de masas en el instante t=tc es
A partir de este instante, la bola rueda sin deslizar y el centro de masas se mueve a lo largo de una línea recta con velocidad constante
Transformación de coordenadas
La relación entre la posición (x, y) del centro de masas C de la bola en el Sistema de Referencia X,Y y la misma posición (x', y') en el Sistema de Referencia X',Y' se puede deducir de la figura
Teniendo en cuenta las relaciones trigonométricas
Obtenemos las relaciones
Trayectoria
En el instante t=0, la velocidad del centro de masas es (V0x, V0y), y la velocidad angular inicial de rotación alrededor de un eje que pasa por el centro de masas es (ω0x, ω0y).
Para dibujar la trayectoria de la bola en la pista seguimos estos pasos
La velocidad inicial del punto P de contacto de la esfera con la pista es
El punto P de contacto de la esfera con la pista desliza durante un tiempo
La velocidad inicial del centro de masas en el Sistema de Referencia X',Y' es
La trayectoria del centro de masas de la bola en el Sistema de Referencia X',Y' en el intervalo 0<t<tc es
Se calcula y representa la trayectoria en el Sistema de Referencia X,Y girado un ángulo θ
La posición y velocidad del centro de masas de la bola en el instante tc es
Se calcula y representa la trayectoria en el Sistema de Referencia X,Y girado un ángulo θ
Desliza
Donde c=v0x/v0y, señala la dirección constante de la velocidad
A partir de este instante la bola rueda sin deslizar
Rueda sin deslizar
A partir del instante tc, el centro de masa de la bola se mueve con a lo largo de una recta con velocidad constante
La trayectoria en el Sistema de Referencia X',Y' es
Ejemplo 1
- Radio de la bola, R=10.79 cm
- Coeficiente cinético de rozamiento, entre la bola y la pista, μ=0.09
- Velocidad inicial del centro de masas, V0x=0, V0y=5.4864 m/s
- Velocidades angulares iniciales de rotación, ω0x=0, ω0y=4 rad/s
function bolera
V0x=0; %velocidades iniciales
V0y=18*30.48/100;
w0x=0;
w0y=4;
R=0.354*30.48/100; %radio
mu=0.09; %coeficiente de rozamiento
v0x=V0x-R*w0y;
v0y=V0y+R*w0x;
c=v0x/v0y; %tangente de th
tc=2*sqrt(v0x^2+v0y^2)/(7*9.8*mu); %tiempo deslizando
%Desliza
Vp0x=(V0x-c*V0y)/sqrt(c^2+1);
Vp0y=(c*V0x+V0y)/sqrt(c^2+1);
t=linspace(0,tc,50);
xp=Vp0x*t;
yp=Vp0y*t-mu*9.8*t.^2/2;
[x,y]=gira(xp,yp);
hold on
plot(x,y)
%Rueda sin deslizar
Vcx=Vp0x;
Vcy=Vp0y-mu*9.8*tc;
xc=Vp0x*tc;
yc=Vp0y*tc-mu*9.8*tc^2/2;
t=linspace(tc,2*tc, 50);
xp=xc+Vcx*(t-tc);
yp=yc+Vcy*(t-tc);
[x,y]=gira(xp,yp);
plot(x,y)
[x,y]=gira(xc,yc);
line([x,x],[0,y],'lineStyle','--')
line([0,x],[y,y],'lineStyle','--')
hold off
grid on
xlabel('x')
ylabel('y')
title('Movimiento de la bola')
function [x,y]=gira(xp,yp)
x=(xp+c*yp)/sqrt(c^2+1);
y=(-c*xp+yp)/sqrt(c^2+1);
end
end
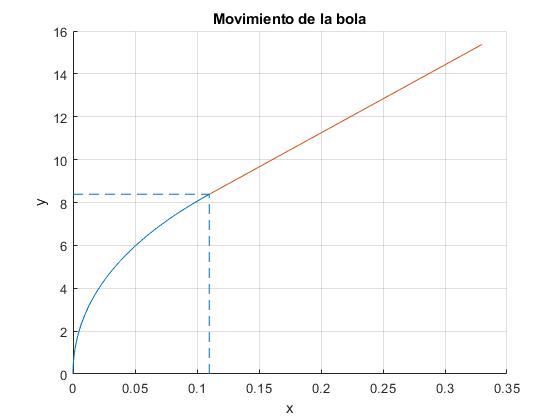
En la figura, se distingue las dos trayectorias que sigue la bola: cuando el punto P de contacto de la bola con la pista desliza y cuando la bola rueda sin deslizar. Se señala la posición de la bola (xc=0.1099 , yc=8.3836) m en el instante tc=1.7828 s
Ejemplo 2
Cambiamos las velocidades iniciales
- Velocidad inicial del centro de masas, V0x=0.1524, V0y=5.4864 m/s
- Velocidades angulares iniciales de rotación, ω0x=4, ω0y=4 rad/s
En la figura, se distingue las dos trayectorias que sigue la bola: cuando el punto P de contacto de la bola con la pista desliza y cuando la bola rueda sin deslizar. Se señala la posición de la bola (xc=0.3690, yc=8.9070) m en el instante tc=1.9192 s
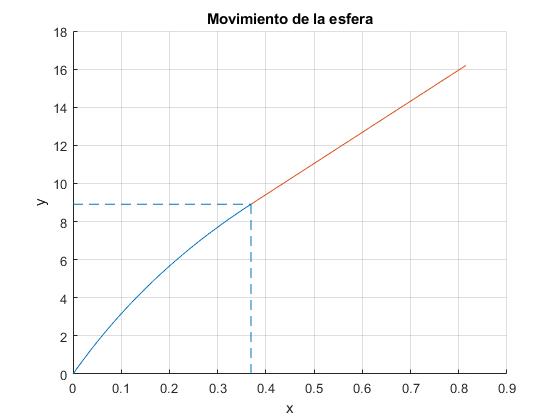
Para que se pueda apreciar la trayectoria, las escalas en el eje X e Y son distintas
Referencias
D. C. Hopkins, J. D. Patterson. Bowling frames: Paths of a bowling ball. Am. J. Phys. 45 (3) March 1977, pp. 263-266