

Movimiento de un carrete que rueda
Movimiento del cilindro
Sea un cilindro de masa m y radio R. Se aplica una fuerza constante F haciendo un ángulo θ (0≤θ<90°) respecto de la horizontal a una cierta altura h, tal como se muestra en la figura.
El cilindro rueda sobre un plano horizontal bajo la acción de la fuerza F y de la fuerza de rozamiento Fr en el punto de contacto P entre el cilindro y el plano horizontal. El sentido de esta fuerza viene determinado por las ecuaciones del movimiento
Supondremos que la componente vertical de la fuerza Fsinθ es menor que el peso mg del cilindro, para que la reacción del plano N=mg-Fsinθ>0.
La ecuación del movimiento de traslación del centro de masas es
La ecuación del movimiento de rotación alrededor del eje del cilindro
Fcosθ+Fr=mac
mR2/2 es el momento de inercia del cilindro. La aceleración angular α se considera positiva si tiene el sentido de las agujas del reloj. La distancia b es
Movimiento de rodar sin deslizar
La velocidad del punto P de contacto es nula para que el cilindro ruede sin deslizar. La relación entre aceleraciones es, ac=αR. En el sistema de dos ecuaciones eliminamos la fuerza de rozamiento Fr
Las aceleraciones se anulan para el ángulo crítico θc
Para θ<θc, las aceleraciones son positivas. Para θ>θc son negativas.
La fuerza de rozamiento Fr no puede ser mayor que la valor máximo μsN=μs(mg-Fsinθ).
Calculamos la fuerza F que hace que la fuerza de rozamiento alcance su valor máximo. En el sistema de ecuaciones eliminamos la aceleración ac, y despejamos la fuerza de rozamiento
Su valor máximo es |Fr|=μs(mg-Fsinθ), despejamos F que denominamos Fm
Para que le cilindro ruede sin deslizar la fuerza aplicada F<Fm tendrá que ser menor que la máxima. Por otra parte, la reacción N=mg-Fsinθ>0
Rueda y desliza
La velocidad del punto de contacto P del cilindro con el plano horizontal no es nula. La fuerza de rozamiento es opuesta al sentido de la velocidad vP. La fuerza de rozamiento vale ahora, |Fr|=μk(mg-Fsinθ). Siendo μk el coeficiente cinético
Para que el cilindro ruede y deslice la fuerza aplicada F>Fm tiene que ser mayor que la máxima y a su vez, tendrá que cumplir que la reacción N>0, es decir, (mg-Fsinθ)>0. El intervalo de valores de la fuerza aplicada es
Véamos un ejemplo. Sea μs=μk=0 y F=mg.
F>Fm=0
La acelearación del centro del cilindro ac y la aceleración α son
La aceleración del centro de masas ac>0
La aceleración angular, presenta un comportamiento más complejo. Se anula para el ángulo tanθc=(h-R)/b
Para h<R, la aceleración angular es negativa, α<0
Para h>R, si θ<θc, entonces α>0. Si θ>θc, entonces α<0
Ejemplos
Sea el coeficiente estático μs=1/4 y el cinético μk=1/5
La fuerza F se aplica a una altura h/R=2. El ángulo θ=0
F=mg
F=mg/4
La fuerza F se aplica a una altura h/R=1. El ángulo θ=90°
F=mg
F=mg/4
La fuerza F se aplica a una altura h/R=1/2. El ángulo θ=60°
F=mg
F=mg/4
N=mg-Fsinθ=mg>0
La fuerza máxima vale, Fm=3mg/4
Analizamos el comportamiento del cilindro para dos valores de la fuerza aplicada F
En este caso, F>Fm, el cilindro rueda y desliza: ac=6g/5 y αR=8g/5.
En este caso, F<Fm, el cilindro rueda sin deslizar: ac=αR=g/3.
Como vemos en la figura, b/R=1
La fuerza máxima vale, Fm=3mg/5
Analizamos el comportamiento del cilindro para dos valores de la fuerza aplicada F
N=mg-Fsinθ=0. No hay fuerza de rozamiento
En este caso, F>Fm, el cilindro rueda y desliza: ac=0 y αR=-2g.
N=mg-Fsinθ>0.
En este caso, F<Fm, el cilindro rueda sin deslizar: ac=αR=-g/6.
La distancia
La fuerza máxima vale,
Analizamos el comportamiento del cilindro para dos valores de la fuerza aplicada F
N=mg-Fsinθ>0.
En este caso, F>Fm, el cilindro rueda y desliza:
N=mg-Fsinθ>0.
En este caso, F<Fm, el cilindro rueda sin deslizar: ac=αR=-g/12.
Movimiento del carrete
Aplicamos una fuerza F al carrete haciendo un ángulo θ con la horizontal tal como se indica en la figura. La fuerza F tiene una componente horizontal F·cosθ .
Las ecuaciones del movimiento son ahora.
Equilibrio en la dirección vertical
Ecuación de la dinámica de la traslación del c.m.
Ecuación de la dinámica de rotación alrededor de un eje que pasa por el c.m.
N+F·sinθ=mg
Siendo N la reacción del plano horizontal. Supondremos N≥0, para que el carrete esté siempre en contacto con la superficie horizontal.
F·cosθ-Fr=m·ac
-F·r+Fr·R=Ic·α
Donde Ic es el momento de inercia del carrete respecto de un eje que pasa por su eje central
Si se cumple que |Fr|≤μs·N y además, el carrete rueda sin deslizar ac=α·R, despejamos la aceleración del centro de masas ac y la fuerza de rozamiento Fr.
Consecuencias
La aceleración del c.m. ac es nula para cosθ=r/R
Cuando cosθ>r/R, la aceleración ac es positiva y el carrete se mueve hacia la derecha.
Cuando cosθ<r/R, la aceleración ac es negativa y el carrete se mueve hacia la izquierda.
La fuerza de rozamiento Fr se anula cuando cosθr=-mrR/Ic
Para estos dos ángulos críticos la aceleración del c.m. cambia de signo
r_R=0.5; %cociente r/R
fplot(@(x) cos(x)-r_R,[0,2*pi]) %proporcional a la aceleración del c.m.
x1=acos(r_R);
line([x1,x1],[-1.5,0],'lineStyle','--')
x2=2*pi-x1;
line([x2,x2],[-1.5,0],'lineStyle','--')
grid on
xlabel('\theta')
ylabel('a_c')
title('Aceleración')
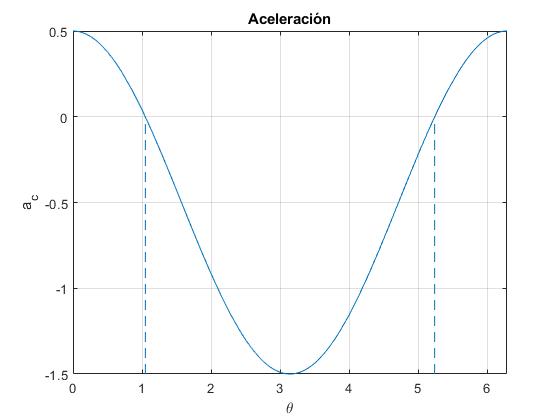
Existen dos ángulos para los cuales la fuerza de rozamiento cambia de signo, siempre que se cumpla que Ic>mrR
Condición de rodar sin deslizar
Queda por determinar el intervalo de ángulos θ para cada fuerza F, para los cuales se cumple que el valor absoluto de la fuerza de rozamiento Fr no exceda el valor máximo μs·N
El valor máximo de F es
Cuando rueda y desliza
Cuando el valor absoluto de la fuerza de rozamiento alcanza su valor máximo |Fr|=μs·N, el carrete empieza a rodar deslizando, se deja de cumplir la relación entre las dos aceleraciones ac≠α·R
- la ecuación de la dinámica de traslación del c.m. nos da el valor de la aceleración ac con Fr=μk·N
- la ecuación de la dinámica de rotación alrededor de un eje que pasa por el c.m. nos da el valor de la aceleración angular α
Carrete de forma cilíndrica
Consideremos un carrete de forma cilíndrica de masa m y radio R, con una pequeña hendidura de radio r, donde se enrolla la cuerda de cuyo extremo se tira con una fuerza F haciendo una ángulo θ con la horizontal. Se supone que la hendidura no contribuye a la masa m o al momento de inercia Ic=mR2/2 del cilindro.
El máximo valor de la fuerza de rozamiento vale, μs(mg-Fsinθ)
- La aceleración ac se anula para cosθ=r/R
- La fuerza de rozamiento Fr se anula para un valor del ángulo θr tal que
Ejemplo:
Sea la masa del carrete m=1 kg, cociente r/R=0.3 y μ=0.6
Si θ=30º, tirando con una fuerza F>2g el carrete deja de tener contacto con el suelo
θc=72.5º, la aceleración ac=0. Para θ<θc, el carrete se mueve hacia la derecha, para θ>θc, el carrete se mueve hacia la izquierda
θr=126.8º la fuerza de rozamiento se hace cero
Dado el valor de la fuerza F, el cociente r/R y el coeficiente μ, vamos a investigar los ángulos 0<θ<π para los que se cumple que |Fr|≤μs·N
Representamos las funciones:
F=5; %fuerza aplicada
r_R=0.3; %cociente de radios r/R
mu=0.6; %coeficiente estático
fr=@(x) abs(F*(cos(x)+2*r_R)/3);
fMax=@(x) mu*(9.8-F*sin(x));
hold on
fplot(fr,[0,pi],'r')
fplot(fMax,[0,pi],'b')
set(gca,'XTick',0:pi/6:pi)
set(gca,'XTickLabel',{'0','\pi/6','\pi/3','\pi/2','2\pi/3','5\pi/6','\pi'})
hold off
grid on
legend('F_r','F_r máx')
xlabel('\theta')
ylabel('F_r')
title('Carrete que rueda')
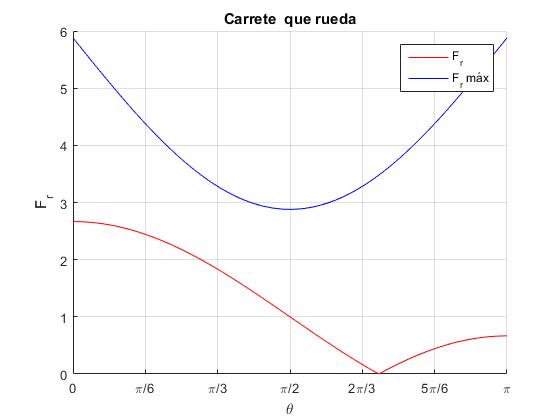
Para μ=0.6, la fuerza de rozamiento Fr se mantiene inferior al valor máximo μsN para todos los ángulos 0<θ<π
Para μ=0.2, la fuerza de rozamiento Fr alcanza un valor superior al máximo μsN para varios ángulos 0<θ<θm
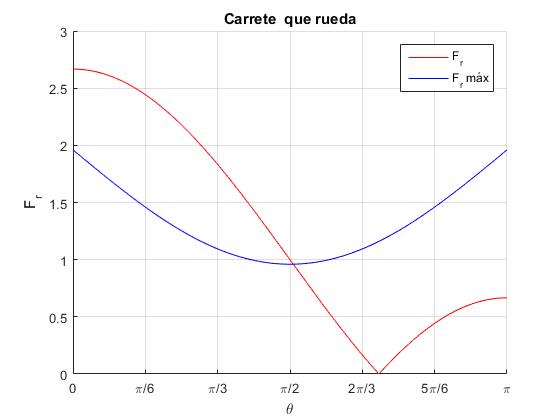
Calculamos el ángulo de intersección θm con la función
>> f=@(x) fr(x)-fMax(x); >> fzero(f,pi/2)*180/pi ans = 91.3655
Actividades
Se introduce
- El valor de la fuerza aplicada F, en el control titulado Fuerza
- La dirección de dicha fuerza, el ángulo θ, en el control titulado Ángulo
- La relación entre el radio del tambor r en el que está enrollada la cuerda y el radio del carrete R, en el control titulado Cociente r/R.
- El coeficiente estático μs, en el control titulado Rozamiento
- La masa está fijada en el programa interactivo m=1 kg
Se pulsa el botón titulado Nuevo
En la parte superior se proporcionan los datos d ela aceleración del centro de masa ac y de la acleración angular α de rotación alrededor de un eje perpendicular al plano del carrete y que pasa por el c.m. Ambas aceleraciones son iguales si el carrete rueda sin deslizar: ac= α·R. El radio R=1 del carrete
Se proporciona el valor de la fuerza de rozamiento Fr y del máximo valor de la fuerza de rozamiento μN
Equilibrio. Estática
Plano horizontal
-
Cuando se cumple que θc=arccos(r/R).
Cuando se cumple que θc=-arccos(r/R). La aceleración del c. m. es cero.
Cuando el carrete descansa sobre el plano horizontal hay dos posibles ángulos de equilibrio θc y -θc
La aceleración del centro de masas ac es cero. A éste ángulo θc se denomina ángulo crítico
La ecuación de equilibrio
La fuerza de rozamiento Fr ha de ser menor que la máxima μsN, por lo que la fuerza aplicada F ha de cumplir
Por otra parte, N=mg-Fsinθc>0
En este caso, las ecuaciones de equilibrio son
La fuerza de rozamiento Fr ha de ser menor que la máxima μsN, por lo que la fuerza aplicada F ha de cumplir
Se cumple siempre que N>0
Plano inclinado
Supongamos que el carrete descansa sobre un plano inclinado un ángulo α
Angulo θ positivo
Angulo θ negativo
Escribimos las ecuaciones de equilibrio tomando momentos respecto del centro C.
Despejamos las incógnitas
Como r/R<1, se alcanza el equilibrio si cosθ>r/R. Por otra parte, la fuerza de rozamiento tiene que ser menor que su valor máximo, Fr≤μsN y la reacción del plano inclinado N>0. Estas condiciones se escriben
Escribimos las ecuaciones de equilibrio tomando momentos respecto del centro C.
Despejamos las incógnitas
Obtenemos las mismas ecuaciones
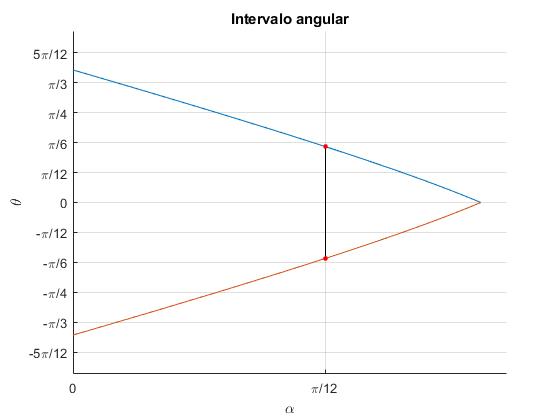
Fijados r/R y μs, representamos los valores positivos de la función f(α)
entre 0 y θ1-α. Para ello, evitamos
Por ejemplo, sea r/R=0.4, y μs=0.3, para una pendiente de α=pi/12 (15°), los ángulos de equilibrio están comprendidos en el intervalo -0.4885≤θ≤0.4885, (línea vertical)
r=0.4; %cociente r/R
mu=0.3; %coeficiente estático
th_1=@(x) acos(r*sin(x)/mu+r*cos(x))-x;
try
f=@(x) sin(x)/mu+cos(x)-1/r;
raiz=fzero(f,[0,pi/2]);
catch
raiz=pi/2;
end
ang_max=fzero(th_1,[0,raiz]);
hold on
fplot(th_1,[0,ang_max])
fplot(@(x) -th_1(x),[0,ang_max])
th=pi/12;
th_max=th_1(th);
line([th,th],[th_max,-th_max],'color','k')
plot(th,th_max,'ro','markersize',3,'markerfacecolor','r')
plot(th,-th_max,'ro','markersize',3,'markerfacecolor','r')
hold off
grid on
set(gca,'XTick',0:pi/12:pi/2)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3', '5\pi/12', '\pi/2'})
set(gca,'YTick',-pi/2:pi/12:pi/2)
set(gca,'YTickLabel',{'-\pi/2','-5\pi/12','-\pi/3','-\pi/4','-\pi/6',
'-\pi/12','0','\pi/12','\pi/6','\pi/4','\pi/3', '5\pi/12', '\pi/2'})
xlabel('\alpha')
ylabel('\theta')
title('Intervalo angular')
Calculamos la fuerza aplicada F, la fuerza de rozamiento Fr y su valor máximo μsN para tres ángulos θ
| θ | F | Fr | μsN |
|---|---|---|---|
| 0 | 0.4314 | 0.1725 | 0.2898 |
| 0.4 (22.9°) | 0.4967 | 0.1987 | 0.2317 |
| 0.4885 (28.0°) | 0.5358 | 0.2143 | 0.2143 |
En los tres casos se cumple que Fr≤μsN
Referencias
V Oliveira. Angular and linear accelerations of a rolling cylinder acted by an external force. Eur. J. Phys. 32 (2011) 381-388
Clemens Wagner, Andreas Vaterlaus. Non-slipping domains of a pulled spool. Eur. J. Phys. 35 (2014) 065002
R De Luca, O Faella. Static properties of a spool on an incline: an IBSE lecture proposal. Phys. Educ. 57 (2022) 055002