

Un cilindro macizo cuya base es una elipse, rueda sin deslizar
Momento de inercia
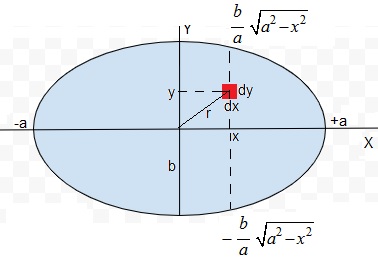
El momento de inercia de un cilindro de base elíptica de semiejes a y b es igual al momento de inercia de una placa de forma elíptica de las mismas dimensiones respecto de un eje perpendicular a la placa y que pase por su centro.
Tomamos un elemento diferencial de área dx·dy, que dista r del eje de rotación, r2=x2+y2. La masa dm contenida en este elemento diferencial es
siendo πab el área de la elipse y m la masa de la placa.
La ecuación de una elipse es
Fijado x, los límites de y son
Los límites de x son ±a. La integral doble se escribe
Integramos respecto de la variable y
Hacemos el cambio de variable, x=asint, dx=acost·dt
Cuando a=b, obtenemos el momento de inercia de un disco de radio a respecto de un eje perpendicular al plano del disco y que pasa por su centro
Movimiento de rodar sin deslizar sobre un plano horizontal
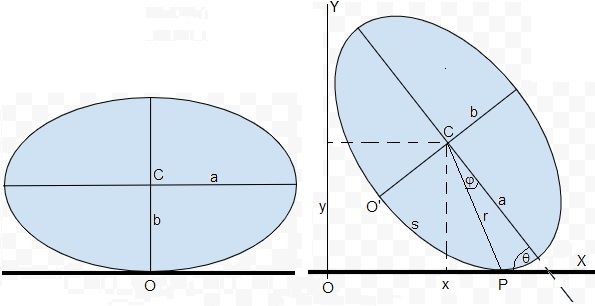
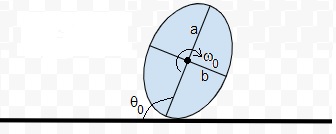
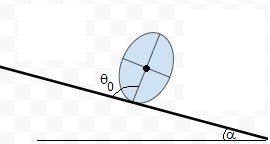
Sea un cilindro de base elíptica de masa m y semiejes a y b, está inicialmente en reposo sobre el plano horizontal tal como se muestra en la figura de la izquierda. La longitud del cilindro l no interviene en la descripción del movimiento
Se hace rodar el cilindro hacia la derecha, P es el punto de contacto entre la elipse y el plano horizontal. La distancia entre O y P es la longitud del arco de elipse entre O' y P. La elipse ha girado un ángulo θ, la intersección del eje mayor de la elipse y el plano horizontal forman un ángulo θ.
Las coordenadas (x, y) del centro de masa se calculan a partir del triángulo rectángulo cuya hipotenusa es r y ángulo en P, θ+φ.
x=s-r·cos(θ+φ)
y=r·sin(θ+φ)
Para describir el movimiento del cilindro de base elíptica, es necesario expresar todas las magnitudes cinemáticas en función del ángulo girado θ
Tangente a la elipse en el punto P de contacto
Arco de elipse
Distancia r del centro C de la elipse al punto P de contacto
Angulo θ+φ del vértice P del triángulo rectángulo.
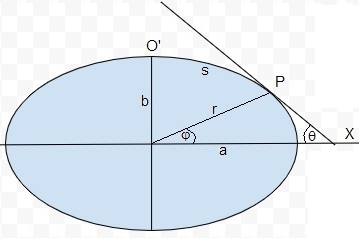
El plano horizontal es tangente a la elipse en P, tal como se muestra en la figura de la elipse girada
Las ecuaciones paramétricas de una elipse son
El ángulo de la tangente a la elipse en el punto P es π-θ
La longitud ds de un elemento diferencial de arco es
Expresamos el arco ds en términos del ángulo girado θ, utilizando las relaciones trigonométricas
Expresamos sin2β y dβ en términos de θ y dθ
Expresamos cos(θ+φ) y sin(θ+φ) en términos del ángulo girado θ, partiendo de la relación
Empezamos con el coseno
Utilizando las relaciones trigonométricas antes mencionadas
Continuamos con el seno
Ya tenemos todos los elementos necesarios para expresar en términos del ángulo girado θ las magnitudes cinemáticas que precisamos.
La altura y del centro C
La componente vertical dy/dt de la velocidad del centro de masas C
La componente horizontal del la velocidad dx/dt del centro de masas C
La coordenada x del centro de masas C
Integramos esta ecuación para obtener la abscisa x en función del tiempo t.
Haciendo el cambio de variable θ'=θ+π/2, obtenemos integrales elípticas incompletas de segunda especie
Ecuación del movimiento
La energía cinética es la suma del la energía cinética correspondiente al movimiento de traslación del centro de masas y la energía cinética de rotación alrededor del eje del cilindro.
La energía potencial es mgy, tomando el plano horizontal como nivel cero
Calculamos la lagrangiana y la ecuación del movimiento
Simplificando, llegamos a la ecuación diferencial
Energías
La energía del cilindro que rueda sin deslizar es constante e igual a la inicial
Fuerzas
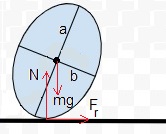
Las fuerzas que actúan sobre el cilindro son:
- el peso mg que actúa en el centro de masas
- la fuerza N que ejerce el plano horizontal sobre el cilindro en el punto de contacto
- la fuerza de rozamiento Fr para que el cilindro ruede sin deslizar, ha de ser menor que la máxima, μsN, siendo μs el coeficiente estático
Aplicamos la segunda ley de Newton.
Despejamos las fuerza por unidad de masa Fr/m y N/m
Resultados
Resolveremos la ecuación diferencial del movimiento con las siguientes condiciones iniciales: en el instante t=0, el ángulo girado es θ0 y la velocidad angular inicial ω0 =(dθ/dt)0
Representamos la energía potencial Ep/(mg) en función del ángulo θ para dos valores del semieje mayor a=1.5, 2, el semieje menor b=1
b=1;
th=110*pi/180;
hold on
for a=[1.5,2];
f=@(x) sqrt(a^2*sin(x).^2+b^2*cos(x).^2);
fplot(f, [pi/2,3*pi/2])
line([th,2*pi-th],[f(th),f(th)])
end
set(gca,'XTick',pi/2:pi/6:3*pi/2)
set(gca,'XTickLabel',{'\pi/2','2\pi/3','5\pi/6','\pi','7\pi/6','4\pi/3','3\pi/2'})
hold off
grid on
xlabel('\theta')
ylabel('E_p/mg')
title('Energía potencial')
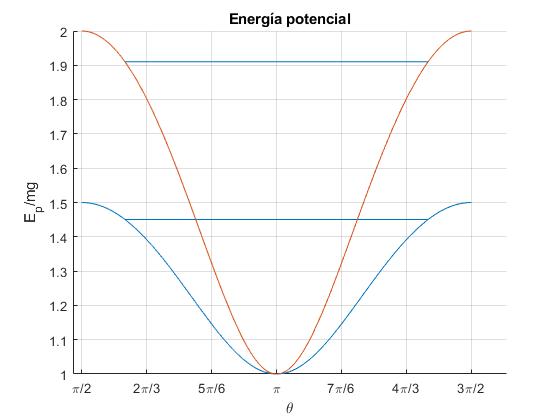
Observamos que la energía potencial es máxima para θ=π/2 y θ=3π/2 (posiciones de equilibrio inestables) y mínima para θ=π (posición de equilibrio estable).
Cuando la velocidad angular inicial es nula, la energía del cilindro es menor que la energía potencial máxima, el cilindro describe oscilaciones de amplitud igual a π-θ0
Cuando la excentricidad de la elipse es grande, la variación de velocidad angular es grande y el procedimiento numérico
Oscilaciones
Velocidad angular
Representamos la velocidad angular dθ/dt en función del tiempo para un cilindro de base elíptica con a=1.25, y b=1. La posición angular inicial es θ0=110°, la velocidad angular inicial es nula. La amplitud de la oscilación es 180-110=70°
function elipse
b=1; %semiejes
a=1.25;
th_0=110*pi/180; %posición angular inicial
[t,x]=ode45(@eDiferencial,[0,10],[th_0,0]);
plot(t,x(:,2))
grid on
xlabel('t')
ylabel('d\theta/dt');
title('Velocidad angular');
%energías
m1=(a^4*sin(x(:,1)).^2+b^4*cos(x(:,1)).^2)./(a^2*sin(x(:,1)).^2+
b^2*cos(x(:,1)).^2)+(a^2+b^2)/4;
Energia=m1.*x(:,2).^2/2+9.8*sqrt(a^2*sin(x(:,1)).^2+
b^2*cos(x(:,1)).^2);
disp(Energia)
function dr=eDiferencial(~, x)
p1=(a^4*sin(x(1))^2+b^4*cos(x(1))^2)/(a^2*sin(x(1))^2+
b^2*cos(x(1))^2)+(a^2+b^2)/4;
p2=a^2*b^2*(a^2-b^2)*cos(x(1))*sin(x(1))/(a^2*sin(x(1))^2+
b^2*cos(x(1))^2)^2;
p3=9.8*(a^2-b^2)*cos(x(1))*sin(x(1))/sqrt(a^2*sin(x(1))^2+
b^2*cos(x(1))^2);
dr=[x(2);-(p2*x(2)^2+p3)/p1];
end
end
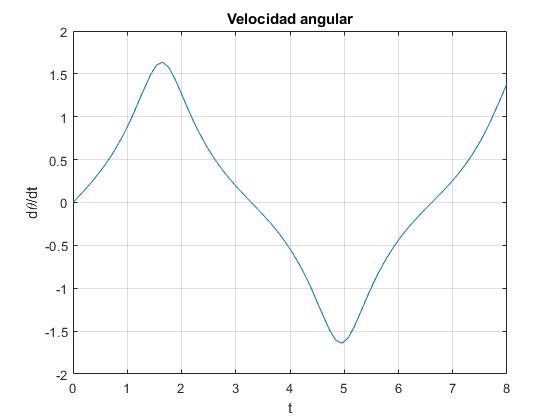
Medimos con el cursor (Data tip) el tiempo t (periodo de la oscilación), que emplea en regresar a la posición inicial con velocidad angular nula, t=6.665 s
Comprobamos que la energía se mantiene aproximadamente constante
11.9893 11.9893 .... 12.1375 12.1375
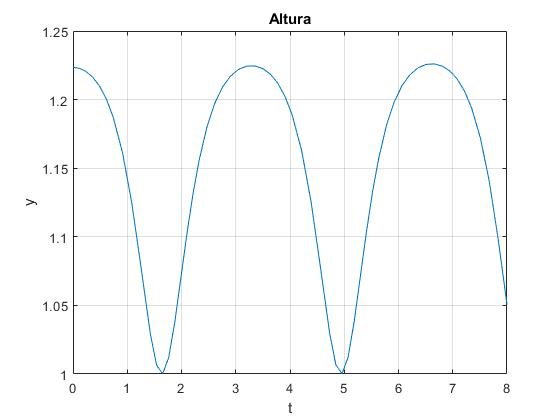
Altura del centro C de la elipse
Representamos la altura y del centro de la elipse en función del tiempo t. La altura la mínima es b en la posición de equilibrio estable θ=π, la máxima es
Para θ0=110°, ymáx=1.2234 m
...
yPos=sqrt(a^2*sin(x(:,1)).^2+b^2*cos(x(:,1)).^2);
plot(t,yPos)
....
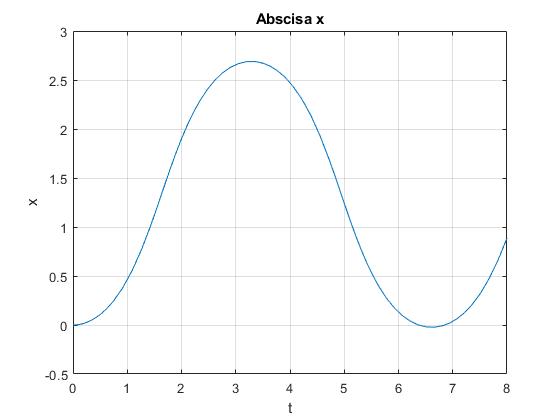
Abscisa x del centro
Tomando como origen el punto de partida del centro del cilindro, representamos la coordenada x del centro C de la elipse en función del tiempo t
...
e2=1-(b/a)^2;
xPos=a*(ellipticE(x(:,1)+pi/2,e2)-ellipticE(th_0+pi/2,e2));
plot(t,xPos)
...
El cilindro regresa al punto de partida, x=0, en el instante t=6.665 s (periodo)
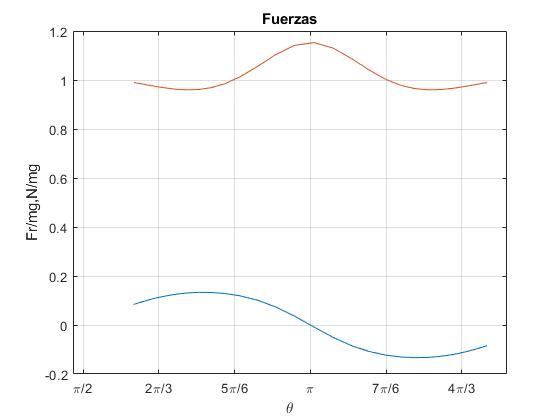
Fuerzas
Representamos las fuerzas Fr/(mg) y N/(mg) en función del ángulo girado θ durante medio periodo de la oscilación 6.665/2 s. La reacción N presenta un máximo para θ=π (posición de equilibrio estable). La fuerza de rozamiento Fr acelera el cilindro y luego, lo frena, es nula es θ=π
function elipse
b=1;
a=1.25;
th_0=110*pi/180;
[t,x]=ode45(@eDiferencial,[0,6.665/2],[th_0,0]);
[Fr,N]=fuerzas(x(:,1),x(:,2));
plot(x(:,1),Fr,x(:,1),N)
set(gca,'XTick',pi/2:pi/6:3*pi/2)
set(gca,'XTickLabel',{'\pi/2','2\pi/3','5\pi/6','\pi','7\pi/6',
'4\pi/3','3\pi/2'})
grid on
xlabel('\theta')
ylabel('Fr/mg,N/mg');
title('Fuerzas');
function [Fr,N]=fuerzas(th,w)
p1=(a^4*sin(th).^2+b^4*cos(th).^2)./(a^2*sin(th).^2+
b^2*cos(th).^2)+(a^2+b^2)/4;
p2=a^2*b^2*(a^2-b^2)*cos(th).*sin(th)./(a^2*sin(th).^2+
b^2*cos(th).^2).^2;
p3=9.8*(a^2-b^2)*cos(th).*sin(th)./sqrt(a^2*sin(th).^2+
b^2*cos(th).^2);
acel=-(p2.*w.^2+p3)./p1;
temp=(a^2*sin(th).^2+b^2*cos(th).^2);
Fr=(((a^2-b^2)*sin(th).*cos(th).*w.^2)./sqrt(temp)+
sqrt(temp).*acel)/9.8;
N=(9.8+((a^2-b^2)*(b^2*cos(th).^4-a^2*sin(th).^4).*w.^2).
/temp.^(3/2)+((a^2-b^2)*cos(th).*sin(th).*acel)./sqrt(temp))/9.8;
end
function dr=eDiferencial(~, x)
p1=(a^4*sin(x(1))^2+b^4*cos(x(1))^2)/(a^2*sin(x(1))^2+
b^2*cos(x(1))^2)+(a^2+b^2)/4;
p2=a^2*b^2*(a^2-b^2)*cos(x(1))*sin(x(1))/(a^2*sin(x(1))^2+
b^2*cos(x(1))^2)^2;
p3=9.8*(a^2-b^2)*cos(x(1))*sin(x(1))/sqrt(a^2*sin(x(1))^2+
b^2*cos(x(1))^2);
dr=[x(2);-(p2*x(2)^2+p3)/p1];
end
end
Movimiento de rodar sin deslizar sobre un plano horizontal
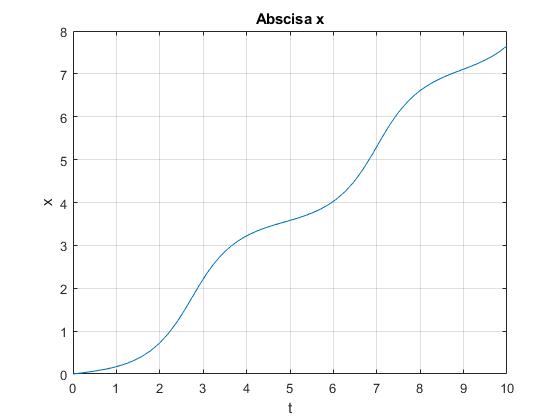
Situamos el cilindro en la posición de equilibrio inestable θ0=π/2 y le porporcionamos una velocidad angular inicial (dθ/dt)0=0.1 rad/s, de modo que su energía inicial es superior al máximo de energía potencial. El cilindro rodará a lo largo del plano horizontal
function elipse
b=1;
a=1.25;
th_0=pi/2;
[t,x]=ode45(@eDiferencial,[0,10],[th_0,0.1]);
e2=1-(b/a)^2;
xPos=a*(ellipticE(x(:,1)+pi/2,e2)-ellipticE(th_0+pi/2,e2));
plot(t,xPos)
grid on
xlabel('t')
ylabel('x');
title('Abscisa x');
function dr=eDiferencial(~, x)
p1=(a^4*sin(x(1))^2+b^4*cos(x(1))^2)/(a^2*sin(x(1))^2+
b^2*cos(x(1))^2)+(a^2+b^2)/4;
p2=a^2*b^2*(a^2-b^2)*cos(x(1))*sin(x(1))/(a^2*sin(x(1))^2+
b^2*cos(x(1))^2)^2;
p3=9.8*(a^2-b^2)*cos(x(1))*sin(x(1))/sqrt(a^2*sin(x(1))^2+
b^2*cos(x(1))^2);
dr=[x(2);-(p2*x(2)^2+p3)/p1];
end
end
Actividades
Se introduce
- El semieje mayor a de la elipse, en el control titulado Semieje mayor
- El semieje menor se ha fijado en b=1
Se puede elegir: Inclinación o Velocidad angular
- En el primer caso, velocidad angular nula, la posición angular inicial θ0 es 180 grados menos el ángulo de inclinación que se introduce en el control titulado Angulo
- Si la velocidad angular inicial no es nula, se introduce su valor en el control titulado Velocidad, la posición angular inicial es θ0=90°
Se observa el movimiento del cilindro de base elíptica sobre la plano horizontal. En la parte superior derecha, se proporcionan los datos de
- tiempo t
- Posición (x,y) del centro de la elipse (eje del cilindro)
- La posición angular θ y la velocidad angular dθ/dt de rotación alrededor del eje del cilindro
Utilizando los botones pausa || y paso >| se puede medir el periodo de oscilación, cuando el cilindro retorna a la posición de partida su velocidad angular de rotación es cero.
El programa calcula en cada instante el tanto por ciento de error relativo en la energía o el cociente
donde E es la energía del sistema en cualquier instante t, y E0 es la energía inicial del sistema.
Este valor se proporciona en caracteres de color rojo en la parte superior. Su valor debe ser siempre cero, o un valor muy pequeño lo que indica que la energía del sistema permanece constante y el programa realiza los cálculos correctamente.
Movimiento de rodar sin deslizar sobre un plano inlinado
El cilindro de base elíptica rueda sin deslizar a lo largo de un plano inclinado un ángulo α. Lo único que cambia es la energía potencial
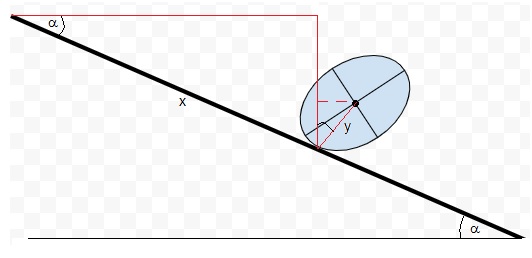
El centro de masa se encuentra por debajo del nivel cero de energía potencial, una altura, xsinα-ycosα.
Calculamos la lagrangiana y la ecuación del movimiento. Solamente tenemos que modificar el término correspondiente a la energía potencial
Simplificando, llegamos a la ecuación diferencial
Cuando la pendiente α=0, obtenemos la ecuación del movimiento del cilindro sobre el plano horizontal
Resolvemos la ecuación diferencial por el procedimiento numérico
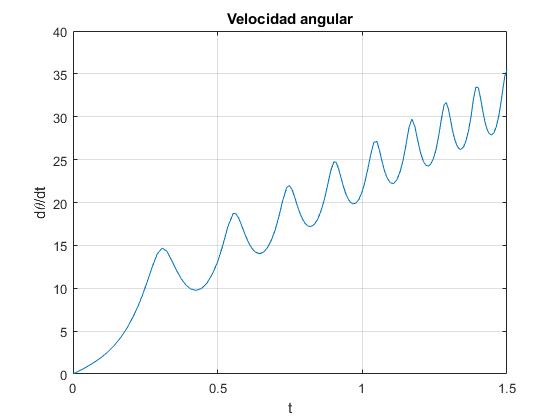
Utilizaremos un cilindro cuya base es una elipse de semiejes a=2.5 y b=2 cm que rueda sobre un plano inclinado α=3.5°. Representamos la velocidad angular dθ/dt de rotación alrededor del eje del cilindro en función del tiempo
function elipse_1
a=0.025;
b=0.02;
aRampa=3.5*pi/180;
th_0=pi/2;
[t,x]=ode45(@eDiferencial,[0,1.5],[th_0,0]);
yPos=sqrt(a^2*sin(x(:,1)).^2+b^2*cos(x(:,1)).^2);
e2=1-(b/a)^2;
xPos=a*(ellipticE(x(:,1)+pi/2,e2)-ellipticE(th_0+pi/2,e2));
plot(t,x(:,2))
grid on
xlabel('t')
ylabel('x');
title('velocidad angular');
m1=(a^4*sin(x(:,1)).^2+b^4*cos(x(:,1)).^2)./(a^2*sin(x(:,1)).^2+
b^2*cos(x(:,1)).^2)+(a^2+b^2)/4;
Energia=m1.*x(:,2).^2/2-9.8*(xPos*sin(aRampa)-yPos*cos(aRampa));
disp(Energia)
function dr=eDiferencial(~, x)
p1=(a^4*sin(x(1))^2+b^4*cos(x(1))^2)/(a^2*sin(x(1))^2+
b^2*cos(x(1))^2)+(a^2+b^2)/4;
p2=a^2*b^2*(a^2-b^2)*cos(x(1))*sin(x(1))/(a^2*sin(x(1))^2+
b^2*cos(x(1))^2)^2;
p3=9.8*(a^2-b^2)*cos(x(1))*sin(x(1))*cos(aRampa)/sqrt(a^2*sin(x(1))^2+
b^2*cos(x(1))^2)-9.8*sin(aRampa)*sqrt(a^2*sin(x(1))^2+b^2*cos(x(1))^2);
dr=[x(2);-(p2*x(2)^2+p3)/p1];
end
end
Comprobamos la conservación de la energía
0.2445
0.2445
....
0.2472
0.2490
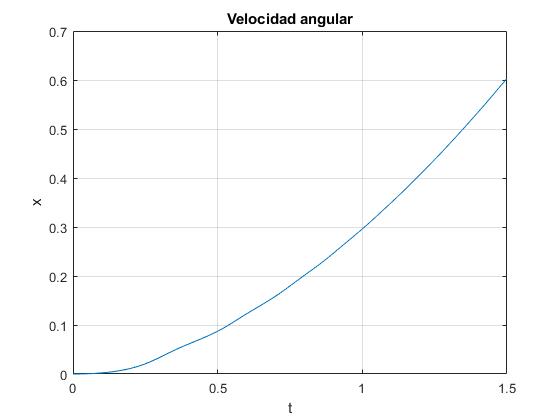
Representamos la posición x del eje del cilindro en función del tiempo
Con una inclinación mayor, el procedimiento
Actividades
Se introduce
- El semieje mayor a de la elipse en cm, en el control titulado Semieje mayor
- El semieje menor se ha fijado en b= 2 cm
- El ángulo del plano inclinado, en el control titulado Pendiente
Observamos el movimiento del cilindro rodando a lo largo del plano inclinado, en la parte superior derecha se proporcionan los datos de
- tiempo t
- Posición (x,y) del centro de la elipse (eje del cilindro)
- La posición angular θ y la velocidad angular dθ/dt de rotación alrededor del eje del cilindro
Referencias
Johan Lindén, Kjell-Mikael Källman, Markus Lindberg. The rolling elliptical cylinder. Am. J. Phys. 89 (4), April 2021, pp. 358-364