

Movimiento de un vehículo
Un vehículo está formado por una plataforma de masa m situada sobre dos cilindros iguales (delantero y trasero) de masa M y radio R. La separación entre los ejes de los cilindros es 2d, la plataforma se eleva h sobre los ejes de las ruedas. El vehículo se mueve a lo largo de un plano inclinado θ.
Supondremos que el momento de inercia de cada rueda es I=MR2/2 y que el coeficiente estático μs y el coeficente cinético μk coinciden y son iguales a μ
Ecuaciones del movimiento
Dibujamos las fuerzas sobre la plataforma y sobre cada uno de los dos cilindros
Las fuerzas de interacción mutua entre las ruedas y la plataforma son n1, n2, f1 y f2
Movimiento de la plataforma
- La plataforma está en equilibrio en la dirección perpendicular al plano inclinado
- El momento de las fuerzas sobre la plataforma deberá ser cero. Elegimos el centro de la plataforma para calcular los momentos
- Si la plataforma se mueve con aceleración a a lo largo del plano, la segunda ley de Newton se escribe
n1+n2=mgcosθ
n1d-n2d-f1h-f2h=0
mgsinθ-f1-f2=ma
Movimiento de la rueda delantera
- Equilibrio en la dirección perpendicular al plano inclinado
- Movimiento de traslación del eje de la rueda a lo largo del plano inclinado
- Movimiento de rotación alrededor del eje del cilindro
Mgcosθ+n1=N1
Mgsinθ+f1-F1=Ma
F1R=I·α1
Movimiento de la rueda trasera
- Equilibrio en la dirección perpendicular al plano inclinado
- Movimiento de traslación del eje de la rueda a lo largo del plano inclinado
- Movimiento de rotación alrededor del eje del cilindro
Mgcosθ+n2=N2
Mgsinθ+f2-F2=Ma
F2R=I·α2
En el sistema de ecuaciones hemos de eliminar las fuerzas: n1, n2, f1 y f2, quedando el siguiente sistema de ecuaciones:
Denominaremos t=h/d y a la masa de la plataforma m=n·M. La masa total (m+2M), suma de la plataforma y las dos ruedas es (n+2) veces la masa M de una rueda.
Tenemos tres ecuaciones con cinco incógnitas: N1, N2, F1, F2 y la aceleración a. Las otras dos ecuaciones F1R=I·α1 y F2R=I·α2, nos permiten calcular las aceleraciones angulares α1 y α2 de cada uno de los cilindros
Estableceremos relaciones entre las cinco incógnitas para resolver los diferentes casos
Los cilindros ruedan sin deslizar
Para que haya movimiento de rodar sin deslizar a=α·R, se tiene que cumplir que Fr≤μs·N
Si los cilindros ruedan sin deslizar, la aceleración a de traslación de eje y la aceleración angular de rotación α alrededor del eje del cilindro, están relacionadas, a=α·R, por lo que se establece las siguientes relaciones entre las fuerzas de rozamiento F1, F2 y la aceleración a del vehículo
Introducimos F1=Ma/2 y F2=Ma/2 en el sistema de tres ecuaciones. Despejamos la aceleración a.
Las aceleraciones angulares de rotación de los cilindros son iguales α1=α2=a/R
Despejamos N1 y N2 en el sistema de tres ecuaciones
Las fuerzas F1=F2 valen
Los valores de las fuerzas F1=F2, se deberán mantener inferiores a F1<μsN1 y F2<μsN2, para que los dos cilindros rueden sin deslizar
Como N2 es menor que N1, el cilindro trasero empieza a deslizar para el ángulo límite θ2
Para que los cilindros rueden sin deslizar el ángulo θ del plano inclinado deberá cumplir θ<θ2. En caso contrario, el cilindro trasero empieza a deslizar y el delantero rueda sin deslizar
El cilindro trasero desliza y el delantero rueda
En este caso, tendremos las siguientes relaciones
- El cilindro delantero rueda sin deslizar, F1R=I·α1=Ia/R
- El cilindro trasero desliza, F2=μkN2 y rueda F2R=I·α2, por lo que a≠α2R
Introducimos en el sistema de tres ecuaciones F1=Ma/2 y F2=μkN2. Despejamos la aceleración a.
Despejamos N1, N2
Las aceleraciones angulares de rotación de los cilindros son distintas, α1=a/R, α2=2F2/MR=μN2/MR
La fuerza F1 vale
El valor de la fuerza F1, se deberá mantener inferior a F1<μsN1, para que el cilindro delantero ruede sin deslizar
El cilindro delantero empieza a deslizar para el ángulo límite θ1
Para que el cilindro delantero ruede sin deslizar el ángulo θ del plano inclinado deberá cumplir θ2<θ<θ1. Si se supera este ángulo θ>θ1, el cilindro delantero empieza a deslizar
Ambos cilindros deslizan
En este caso, tendremos las siguientes relaciones
- El cilindro delantero desliza, F1=μkN1 y rueda F1R=I·α1, por lo que a≠α1R
- El cilindro trasero desliza, F2=μkN2 y rueda F2R=I·α2, por lo que a≠α2R
Introducimos F1=μN1 y F2=μN2 en el sistema de tres ecuaciones. Despejamos la aceleración a.
Despejamos N1, N2
Las aceleraciones angulares de rotación de los cilindros son distintas, α1=2F1/MR=μN1/MR y α2=μN2/MR
Resultados
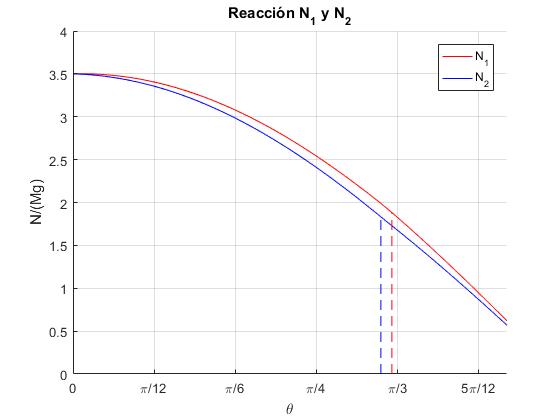
Representamos las reacciones del plano inclinado N1/Mg y N2/Mg en función del ángulo θ, para t=h/d=0.3, n=5 y μ=0.2
t=0.3; %h/d
mu=0.2; %coeficiente de rozamiento
n=5; %masa plataforma
ang2=atan(mu*(n+2)*(n+3)/((n+2)+mu*t*n));
ang1=atan(mu*(n*mu*t+(n+3)));
ang=linspace(0,ang2,50);
N1=(n+2)*cos(ang)/2+n*t*sin(ang)/(2*(n+3));
N2=(n+2)*cos(ang)/2-n*t*sin(ang)/(2*(n+3));
hold on
plot(ang,N1,'r')
plot(ang,N2,'b')
line([ang2,ang2],[0,N2(end)], 'color','b','lineStyle','--');
ang=linspace(ang2,ang1,50);
aa=(2*(n+2)*sin(ang)-mu*((n+2)*cos(ang)-n*t*sin(ang)))/(2*n+5+n*t*mu);
N1=(n+2)*cos(ang)/2+n*(sin(ang)-aa)*t/2;
N2=(n+2)*cos(ang)/2-n*(sin(ang)-aa)*t/2;
plot(ang,N1,'r')
plot(ang,N2,'b')
line([ang1,ang1],[0,N1(end)],'color','r','lineStyle','--');
ang=linspace(ang1,1.4,50); %1.4 es 80º
N1=((n+2)+mu*t*n)*cos(ang)/2;
N2=((n+2)-mu*t*n)*cos(ang)/2;
plot(ang,N1,'r')
plot(ang,N2,'b')
hold off
grid on
xlabel('\theta')
ylabel('N/(Mg)')
set(gca,'XTick',0:pi/12:pi/2)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4', '\pi/3', '5\pi/12'})
legend('N_1', 'N_2')
title('Reacción N_1 y N_2')
En la figura, se señalan los ángulo θ2 y θ1. Los tres regímenes de movimiento son:
- θ<θ2, los dos cilindros ruedan sin deslizar
- θ2<θ<θ1, el cilindro trasero desliza y el delantero rueda sin deslizar
- θ>θ1, los dos cilindros deslizan
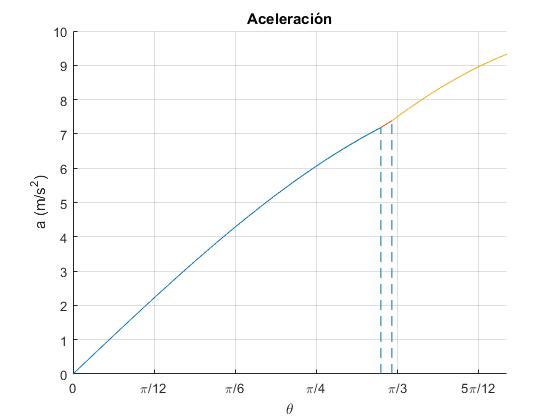
Representamos la aceleración a del vehículo en función del ángulo θ, para t=h/d=0.3, n=5 y μ=0.2
t=0.3; %h/d
mu=0.2; %coeficiente de rozamiento
n=5; %masa plataforma
ang2=atan(mu*(n+2)*(n+3)/((n+2)+mu*t*n));
ang1=atan(mu*(n*mu*t+(n+3)));
ang=linspace(0,ang2,50);
a=9.8*(n+2)*sin(ang)/(n+3);
hold on
plot(ang,a);
line([ang2,ang2],[0,a(end)],'lineStyle','--');
ang=linspace(ang2,ang1,50);
a=9.8*(2*(n+2)*sin(ang)-mu*((n+2)*cos(ang)-n*t*sin(ang)))/(2*n+5+n*t*mu);
plot(ang,a)
line([ang1,ang1],[0,a(end)],'lineStyle','--');
ang=linspace(ang1,1.4,50); %1.4 es 80º
a=9.8*(sin(ang)-mu*cos(ang));
plot(ang,a)
hold off
grid on
xlabel('\theta')
ylabel('a (m/s^2)')
set(gca,'XTick',0:pi/12:pi/2)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4', '\pi/3', '5\pi/12'})
title('Aceleración')
Referencias
Problema propuesto en XXXIII Olimpiada Internacional de Física. Nusa Dua (Indonesia), 2002