

Choques en una dimensión
En esta página, se describen los choques frontales de dos partículas en el Sistema de Referencia del Laboratorio (Sistema -L) y en el Sistema de Referencia del Centro de Masa (Sistema–C).
Coeficiente de restitución
Se ha encontrado experimentalmente que en una colisión frontal de dos esferas sólidas como las que experimentan las bolas de billar, las velocidades después del choque están relacionadas con las velocidades antes del choque, por la expresión

donde e es el coeficiente de restitución y tiene un valor entre 0 y 1. Esta relación fue propuesta por Newton y tiene validez solamente aproximada. El valor de uno es para un choque perfectamente elástico y el valor de cero para un choque perfectamente inelástico.
Choques frontales
Descripción desde el Sistema de Referencia del Laboratorio
Supongamos que la segunda partícula u2=0, está en reposo antes del choque. La conservación de la conservación del momento lineal
m1u1+m2u2=m1v1+m2v2
De la definición del coeficiente de restitución e
-e(u1-u2)=v1-v2
Despejando las velocidades después del choque v1 y v2
La velocidad v1 después del choque, de la partícula de masa m1 es más pequeña que la velocidad v2 después del choque, de la partícula de masa m2
Supongamos que v1<v2
Para que se produzca choque, las velocidades iniciales, antes del choque, u1>u2. A la izquierda tenemos un número negativo y a la derecha un número positivo, por lo que es una afirmación correcta
Teniendo en cuenta que la velocidad del centro de masas es
Escribimos las expresiones de la velocidad de las partículas después del choque v1 y v2 de forma más simplificada.
v1=(1+e)Vcm-eu1
v2=(1+e)Vcm-eu2
Si la segunda partícula está en reposo antes del choque, u2=0. Las velocidades después del choque v1 y v2 serán.
Descripción desde el Sistema de Referencia del Centro de Masa
Velocidad de las partículas respecto del Sistema-C antes del choque
Velocidad de las partículas respecto del Sistema-C después del choque
v1cm=-e·u1cm
v2cm=-e·u2cm
La velocidad de ambos objetos después del choque en el Sistema-C se reducen en un factor e.
Comprobamos también que se cumple el principio de conservación del momento lineal en el Sistema-C
m1·u1cm+m2·u2cm=0
m1·v1cm+m2·v2cm=0
Energía perdida en el choque
La energía perdida en la colisión Q es la diferencia de las energías cinéticas después del choque y antes del choque en el Sistema-L.
Pero es mucho más fácil calcular esta diferencia en el Sistema-C.
Ejemplo:
- Primera partícula: m1=1, u1=2
- Segunda partícula: m2=2, u2=0
- Coeficiente de restitución: e=0.9
- Principio de conservación del momento lineal
- Definición de coeficiente de restitución
1·2+2·0=1·v1+2·v2
-0.9(2-0)=v1-v2
Resolviendo el sistema de dos ecuaciones con dos incógnitas obtenemos
v1=-0.53, v2=1.27 m/s
Energía perdida en la colisión (Sistema-L)
Calculada mediante la fórmula (Sistema-C)
Solución con MATLAB
%masas y velocidades iniciales de las partículas
m1=1;
u1=2;
m2=2;
u2=0;
e=0.9; %coeficiente de restitución
%velocidades después del choque
v1=((m1-m2*e)*u1+m2*(1+e)*u2)/(m1+m2);
v2=(m1*(1+e)*u1+(m2-m1*e)*u2)/(m1+m2);
fprintf('Velocidades: %1.2f de la partícula 1,
%1.2f de la partícula 2\n',v1,v2);
Q=0.5*(1-e^2)*m1*m2*(u1-u2)^2/(m1+m2);
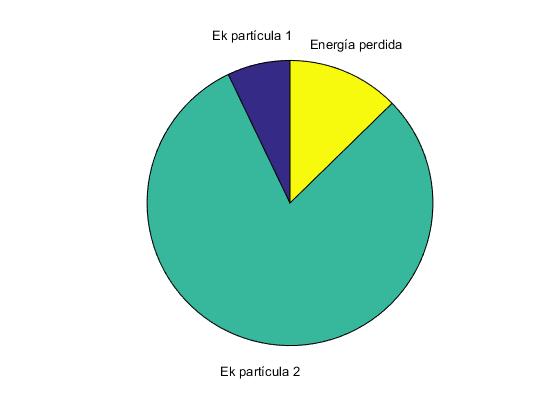
labels = {'Ek partícula 1','Ek partícula 2','Energía perdida'}
X=[m1*v1^2/2,m2*v2^2/2,Q];
pie(X,labels)
Velocidades: -0.53 de la partícula 1, 1.27 de la partícula 2
En el diagrama de tarta vemos como se reparte la energía inicial del sistema de dos partículas: Energía cinética de la primera partícula, energía cinética de la segunda partícula, energía Q perdida en el choque
Choques elásticos
Obtenemos de forma alternativa, las velocidades v1 y v2 después del choque para un choque elástico empleando la conservación del momento lineal y de la energía cinética.
Principio de conservación del momento lineal
En un choque elástico, la energía cinética inicial es igual a la final, Q=0.
m1u1+m2u2=m1v1+m2v2
Dados u1 y u2, las velocidades de las partículas m1 y m2 antes del choque, calculamos las velocidades de las partículas v1 y v2 después del choque resolviendo el sistema de dos ecuaciones con dos incógnitas.
Trasformamos las dos ecuaciones, en las equivalentes
La diferencia de los cuadrados de dos números es igual al producto de su suma por su diferencia
Nos queda un sistema de dos ecuaciones más fácil de resolver
Despejamos las velocidades de las partículas después del choque v1 y v2
Son las mismas ecuaciones que hemos obtenido previamente con el coeficiente de restitución e=1.
El caso particular mas interesante ocurre cuando las masas de las dos partículas son iguales, m1=m2 y la segunda partícula está inicialmente en reposo u2=0. Después del choque, la primera partícula queda en reposo v1=0 y la velocidad de la segunda partícula v2=u1. La energía cinética de la primera particula se transfiere integramente a la segunda
Teniendo en cuenta que la velocidad del centro de masas es
Escribimos las expresiones de la velocidad de las partículas después del choque v1 y v2 de forma más simplificada.
v1=2Vcm-u1
v2=2Vcm-u2
Choque completamente inelásticos
Las partículas quedan pegadas después del choque moviéndose con la misma velocidad v1=v2=v
Principio de conservación del momento lineal
En un choque inelástico, la energía cinética inicial es mayor que la final
m1u1+m2u2=(m1+m2)v
Los mismos resultados que hemos obtenido para los choques frontales con el coeficiente de restitución e=0
Definimos la razón f al cociente entre energía cinética final e inicial
Para que se produzca un choque
- u1>0 y u1>u2, 0<x<1
- Choque frontal, u1>0 y u2<0, -∞<x<0
Representamos f en función de x para tres valores de m=1/3, 1, 3.
hold on
for m=[1/3,1,3]
f=@(x) ((1+m*x).^2)./((1+m)*(1+m*x.^2));
fplot(f,[-10,1])
end
xlabel('u_2/u_1')
ylabel('f')
grid on
legend('m=1/3','m=1','m=3', 'Location','best')
title('Fracción de energía cinética')
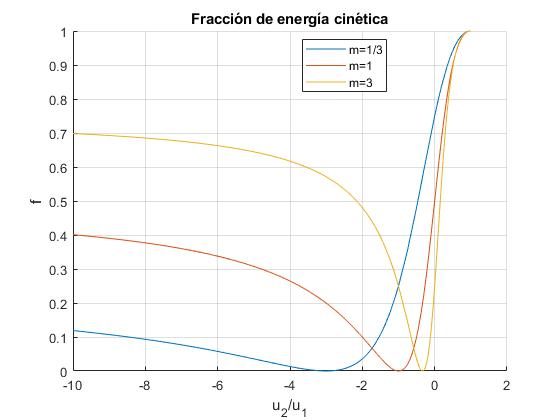
- f=0, en una colisión es frontal en la que v=0, m1u1+m2u2=0, es decir, para x=-1/m
- f=1, cuando u1=u2. En realidad, las partículas no llegan a chocar
- Cuando la segunda partícula está en reposo, u2=0, x=0, la fracción f=1/(1+m).
- Cuando x→-∞ (por ejemplo, la primera partícula está en reposo u1=0 y u2<0). f tiende hacia un valor constante m/(1+m). Por ejemplo, para m=1/3, f→1/4
Actividades
Se introduce
- El coeficiente de restitución e, un valor comprendido entre 0 y 1en el control titulado Coef. restitución. El valor de 1 corresponde a un choque elástico
- El cociente entre las masas m2/m1, en el control titulado Cociente masas. Donde m2 es la masa de la partícula que está inicialmente en reposo y m1 la masa de la partícula inicialmente en movimiento.
- La velocidad de la primera partícula u1, en el control titulado Velocidad
Se pulsa el botón titulado Nuevo.
En la mitad superior del programa interactivo, se representa el choque frontal en el Sistema-L del laboratorio. Una cruz de color rosa representa la posición del centro de masas del sistema formado por las dos partículas interactuantes. Se representa también mediante un diagrama de tarta la energía inicial y final de las partículas. Cuando el choque es elástico la energía inicial es igual a la final. Cuando el choque es inelástico (coeficiente de restitución menor que la unidad) la energía final es menor que la inicial.
En la parte inferior, se representa el mismo choque en el Sistema-C del centro de masas
Se proporcionan los datos correspondientes a la velocidad de las partículas antes del choque y después del choque tanto en el Sistema–L como en el Sistema-C. Se representan también los momentos lineales en forma de vectores antes del choque y después del choque. De este modo el lector puede comprobar de forma visual la conservación del momento lineal.
Ejemplo
Dos cuerpos A y B de la misma masa m se sitúan en un plano inclinado θ muy largo, con A por encima de B separados una distancia d.
- El coeficiente cinético de rozamiento entre el cuerpo A y el plano inclinado es μA
- El coeficiente cinético de rozamiento entre el cuerpo B y el plano inclinado es μB
Se cumple que tan θ>μB>μA.
Los cuerpos se sueltan en el instante t=0.
- ¿En qué instante t1, los cuerpos chocan por primera vez?
- ¿En que otros instantes, los cuerpos vuelven a chocar?
- Representar la velocidad y posición de cada uno de los cuerpos en función del tiempo
Choque elástico
Sea un choque elástico, coeficiente de restitución e=1, entre dos partículas de la misma masa, m1=m2=m. Se resuelve el sistema de dos ecuaciones
Las velocidades iniciales, justo antes del choque son u1 y u2 y las velocidades finales, justo después del choque, v1 y v2
Alternativamente, de la conservación del momento lineal y la energía
El resultado es v1=u2, v2=u1. Se intercambian las velocidades de las dos partículas
Etapa inicial
La condición tanθ>μ, implica que mg·sinθ>μmg·cosθ, el cuerpo desliza a lo largo del plano inclinado. Las ecuaciones del movimiento son
Las aceleraciones de cada uno de los cuerpos son
En la etapa inicial, el cuerpo A desliza y alcanza el cuerpo B con el que choca. Ponemos el origen en la posición inicial del cuerpo A, de modo que, en el instante t=0, xA=0 y xB=d, parten del reposo. En el instante t
Se encuentran en el instante t1, cuando xA=xB
La posición de encuentro es
En el instante t1 los cuerpos van a chocar, sus velocidades inmediatamente antes del choque son
Primera etapa
Las velocidades después del choque, iniciales para la primera etapa del movimiento son
La velocidad inicial de A es menor que la de B pero la aceleración de A es mayor que la de B luego, se volverán a encontrar
La velocidad y la posición en el instante t de cada uno de los cuerpos
Se encuentran en el instante t1+t2. Calculamos t2 haciendo xA=xB
La posición de encuentro es
Las velocidades de los dos cuerpos, en el instante 3t1, antes del choque, son
Segunda etapa
Las velocidades después del choque, iniciales para la segunda etapa del movimiento son
La velocidad y la posición en el instante t de cada uno de los cuerpos
Se encuentran en el instante 3t1+t3. Calculamos t3 haciendo xA=xB
La posición de encuentro es
Las velocidades de los dos cuerpos, en el instante 5t1, antes del choque, son
Tercera etapa
Las velocidades después del choque, iniciales para la tercera etapa del movimiento son
La velocidad y la posición en el instante t de cada uno de los cuerpos
Se encuentran en el instante 5t1+t4. Calculamos t4 haciendo xA=xB
La posición de encuentro es
Las velocidades de los dos cuerpos, en el instante 7t1, antes del choque, son
Cuarta etapa
Así, sucesivamente ...
Cálculo y representación gráfica
Consideremos el siguiente sistema
- Angulo del plano inclinado, θ=π/6 (30°)
- Coeficiente cinético de rozamiento entre el cuerpo A y el plano inclinado, μA=0.2
- Coeficiente cinético de rozamiento entre el cuerpo B y el plano inclinado, μB=0.4
- Distancia inicial entre los dos cuerpos, d=1 m
Se cumple que tan θ>μB>μA.
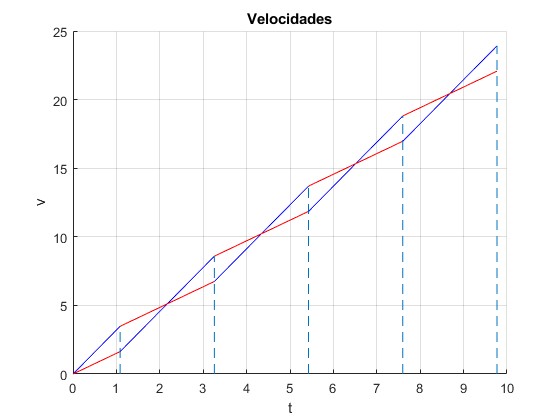
Representamos las velocidades de los dos cuerpos en función del tiempo. (del cuerpo A en color azul y del B en color rojo). La línea a trazos marca los instantes en los que se produce el choque, t1, 3t1, 5t1, 7t1,...
th=pi/6; %ángulo del plano inclinado
mu_B=0.4; %coef. rozamiento B-plano
mu_A=0.2; %coef. rozamiento A-plano
d=1; %separación inicial
t1=sqrt(2*d/((mu_B-mu_A)*9.8*cos(th)));
a_A=9.8*(sin(th)-mu_A*cos(th));
a_B=9.8*(sin(th)-mu_B*cos(th));
x1=a_A*t1^2/2;
u_A=a_A*t1;
u_B=a_B*t1;
line([0,t1],[0,u_A],'color','b')
line([0,t1],[0,u_B],'color','r')
line([t1,t1],[0, u_A],'lineStyle','--')
for i=1:4
v0_A=u_B;
v0_B=u_A;
u_A=v0_A+a_A*(2*t1);
u_B=v0_B+a_B*(2*t1);
line([t1+(i-1)*(2*t1),t1+i*(2*t1)],[v0_A,u_A],'color','b')
line([t1+(i-1)*(2*t1),t1+i*(2*t1)],[v0_B,u_B],'color','r')
line([t1+i*(2*t1),t1+i*(2*t1)],[0, u_A],'lineStyle','--')
end
grid on
xlabel('t')
ylabel('v')
title('Velocidades')
Representamos las posiciones de los dos cuerpos en función del tiempo. (del cuerpo A en color azul y del B en color rojo). La posición inicial de A es xA=0 y de B xB=d
th=pi/6; %ángulo del plano inclinado
mu_B=0.4; %coef. rozamiento B-plano
mu_A=0.2; %coef. rozamiento A-plano
d=1; %separación inicial
t1=sqrt(2*d/((mu_B-mu_A)*9.8*cos(th)));
a_A=9.8*(sin(th)-mu_A*cos(th));
a_B=9.8*(sin(th)-mu_B*cos(th));
%etapa incial
x0=a_A*t1^2/2;
u_A=a_A*t1;
u_B=a_B*t1;
hold on
x_A=@(t) a_A*t.^2/2;
x_B=@(t) d+a_B*t.^2/2;
fplot(x_A,[0,t1], 'color','b')
fplot(x_B,[0,t1], 'color','r')
plot(t1,x_A(t1),'ko','markersize',3,'markerfacecolor','k')
line([t1,t1],[0, x_A(t1)],'lineStyle','--')
for i=1:3
v0_A=u_B;
v0_B=u_A;
xf=x0+v0_A*(2*t1)+a_A*(2*t1)^2/2;
u_A=v0_A+a_A*(2*t1);
u_B=v0_B+a_B*(2*t1);
x_A=@(t) x0+v0_A*(t-t1-(i-1)*(2*t1))+a_A*(t-t1-(i-1)*(2*t1)).^2/2;
x_B=@(t) x0+v0_B*(t-t1-(i-1)*(2*t1))+a_B*(t-t1-(i-1)*(2*t1)).^2/2;
fplot(x_A ,[t1+(i-1)*(2*t1),t1+i*(2*t1)], 'color','b')
fplot(x_B,[t1+(i-1)*(2*t1),t1+i*(2*t1)], 'color','r')
plot(t1+i*(2*t1),x_A(t1+i*(2*t1)),'ko','markersize',3,
'markerfacecolor','k')
line([t1+i*(2*t1),t1+i*(2*t1)],[0, x_A(t1+i*(2*t1))],'lineStyle','--')
x0=xf;
end
hold off
grid on
xlabel('t')
ylabel('x')
title('Desplazamientos')
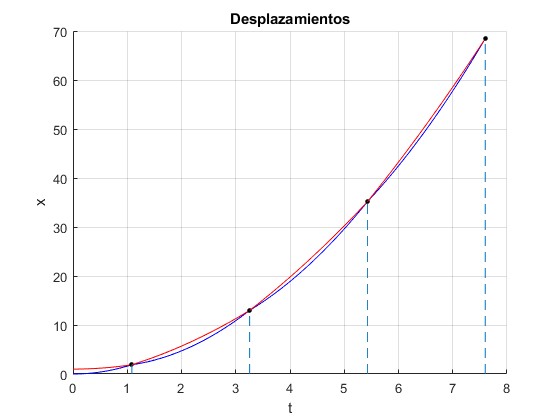
Los puntos de color negro, señalan las posciones en las que ocurren los choques
Comprobación, posición de encuentro x4
>xf = 68.4508 >> 4.9*(49*sin(th)-(25*mu_A+24*mu_B)*cos(th))*t1^2 ans = 68.4508
Referencias
Indian National Physics Olympiad. Homi Bhabha Centre for Science Eduaction. Solved papers NSEP & INPhO, 2016-2018, Ejemplo 3, enunciado, 213, solución, 216-218