

Movimiento en una superficie cónica
Movimiento sobre la superficie cónica
Consideremos una partícula de masa m que se puede mover sobre una superficie cónica de ángulo 2θ bajo la acción de su propio peso. En un instante dado t, la partícula dista r del vértice del cono y hace un ángulo φ con el eje X tal como se muestra en la figura. Describimos el movimiento de la partícula en coordenadas esféricas (r, φ, θ) con el ángulo θ constante.
La posición de la partícula es
Derivando con respecto del tiempo obtenemos las componentes de la velocidad
La energía cinética es
La energía potencial es V=mgz=mgrcosθ
La lagrangiana L=T-V es
Ecuaciones del movimiento
La primera ecuación del movimiento es
La segunda ecuación del movimiento es
Principios de conservación
Como la lagrangiana L es independiente de φ, obtenemos una cantidad h que se conserva
Comprobamos que h está relacionado con la componente Z del momento angular
La ecuación del movimiento en la dirección radial se convierte en
que a su vez es la derivada con respecto del tiempo de una cantidad que se conserva
La conservación de la energía ε se expresa
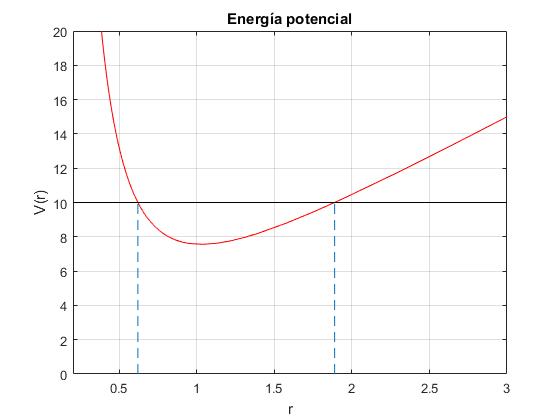
Energía potencial efectiva
V(r) es la energía potencial efectiva para el movimiento en la dirección radial.
Para un valor dado de la energía ε el movimiento en la dirección radial tiene lugar entre las distancias r1 y r2 dados por las soluciones de la ecuación
theta=pi/3; %ángulo del cono
h2=4; %cuadrado del momento angular Lz
energia=10; %energía
%energia potencial
f=@(r) h2/(2*r^2*sin(theta)^2)+9.8*r*cos(theta);
fplot(f,[0.2,3],'color','r')
ylim([0,20])
line([0,3],[energia,energia],'color','k')
%raíces
g=@(r) f(r)-energia;
r1=fzero(g,0.4);
r2=fzero(g,2);
line([r1,r1],[0,energia], 'lineStyle','--')
line([r2,r2],[0,energia],'lineStyle','--')
grid on
xlabel('r')
ylabel('V(r)')
title('Energía potencial')
En vez de utilizar
>> a=-energia/(9.8*cos(theta));
>> c=h2/(2*9.8*sin(theta)^2*cos(theta));
>> raices_3([1,a,0,c])
ans =
-0.4659
1.8882
0.6186
De las tres raíces reales dos son positivas r1 y r2 y una es negativa.
El mínimo de V(r) corresponde a una trayectoria circular de radio r0.
Conocido el momento angular h, despejamos el radio de la trayectoria circular r0
De la constancia del momento angular h, obtenemos la velocidad angular dφ/dt constante de la partícula
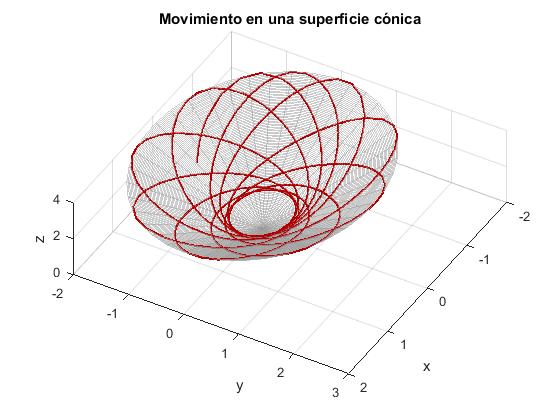
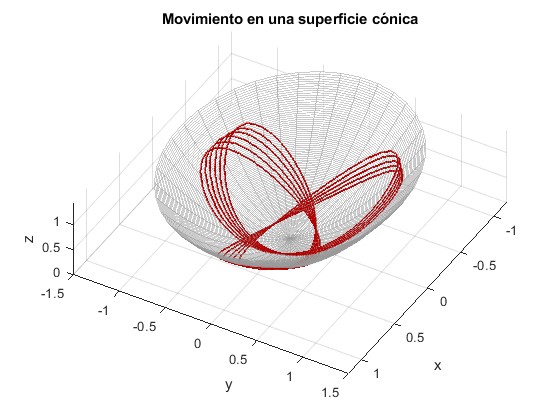
Trayectoria sobre la superficie cónica
Para representar la trayectoria seguida por la partícula, partimos de la posición r=r1 en el que se cumple que dr/dt=0, establecemos φ=0. Determinamos la constante h a partir de los datos de r1 y r2. Igualando V(r1)=V(r2) obtenemos
Integramos las dos ecuaciones diferenciales con las condiciones iniciales señaladas para obtener la trayectoria r=r(φ) en la superficie cónica
r1=1;
r2=4; %radios mínimo y máximo
theta=pi/6; %ángulo del cono
%cuadrado del moemnto angular Lz
h2=2*9.8*r1^2*r2^2*sin(theta)^2*cos(theta)/(r1+r2);
x0=[r1,0,0]; %condiciones iniciales
tspan=[0,20];
% x(1)=r, x(2)=dr/dt,x(3)=phi
fg=@(t,x)[x(2); h2/(x(1)^3*sin(theta)^2)-9.8*cos(theta);
sqrt(h2)/(x(1)^2*sin(theta)^2)];
[t,x]=ode45(fg,tspan,x0);
xp=x(:,1).*cos(x(:,3))*sin(theta);
yp=x(:,1).*sin(x(:,3))*sin(theta);
zp=x(:,1)*cos(theta);
hold on
view(120,70)
%superficie cónica
phi=linspace(0,2*pi,40);
r=linspace(0,4);
[phi,r]=meshgrid(phi,r);
x=r.*cos(phi)*sin(theta);
y=r.*sin(phi)*sin(theta);
z=r*cos(theta);
h1=mesh(x,y,z);
set(h1,'EdgeColor',[0.6,0.6,0.6], 'FaceAlpha',0.5,'EdgeAlpha',0.5)
%trayectoria
h1=line(xp,yp,zp);
set(h1,'Color',[.7,0,0],'LineWidth',1.5)
hold off
grid on
xlabel('x')
ylabel('y')
zlabel('z')
title('Movimiento en una superficie cónica')
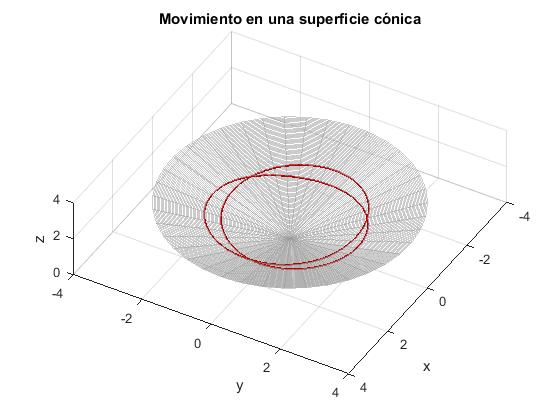
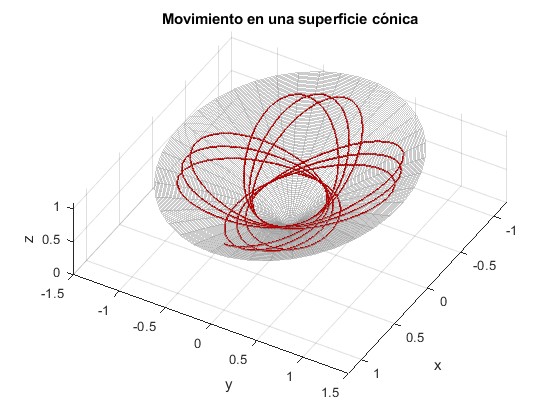
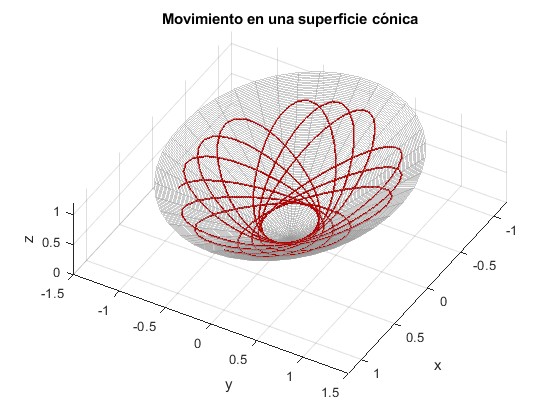
Trayectorias casi circulares
Para una trayectoria circular de radio r0, la velocidad angular dφ/dt es constante
Si el radio r de la trayectoria cambia muy poco con el tiempo, r=r0+δ(t) . Aproximamos 1/r3
>> syms x x0; >> taylor(1/x^3,x,x0,'Order',2) ans =1/x0^3 - (3*(x - x0))/x0^4
Introduciendo esta aproximación en la primera ecuación diferencial
que corresponde a un Movimiento Armónico Simple de frecuencia angular Ω
El cociente Ω/ω es independiente de r0
La trayectoria es cerrada si este cociente es un número racional m/n. Por ejemplo, si θ=60° el cociente es 3/2. Para que el cociente sea 1/2 el ángulo θ=16.8°
Escribimos la aproximación r=r0+δ(t)=r0+ρcos(Ωt). Donde ρ<<r0, es la amplitud
Conocida la expresión de r(t), obtenemos la expresión aproximada del ángulo φ(t), del siguiente modo
%r1=2;
%r2=2.5; %radios mínimo y máximo
r0=2.25;
theta=pi/3; % probar con asin(sqrt(3)/6);
w=sqrt(9.8*cos(theta)/r0)/sin(theta);
W=sqrt(3*9.8*cos(theta)/r0);
t=0:0.01:2*pi*W/w;
r=r0+0.25*sin(W*t);
phi=w*t-2*(0.25/r0)*(w/W)*sin(W*t);
xp=r.*cos(phi)*sin(theta);
yp=r.*sin(phi)*sin(theta);
zp=r*cos(theta);
hold on
view(120,70)
%superficie cónica
phi=linspace(0,2*pi,40);
r=linspace(0,4);
[phi,r]=meshgrid(phi,r);
x=r.*cos(phi)*sin(theta);
y=r.*sin(phi)*sin(theta);
z=r*cos(theta);
h1=mesh(x,y,z);
set(h1,'EdgeColor',[0.6,0.6,0.6], 'FaceAlpha',0.5,'EdgeAlpha',0.5)
%trayectoria
h1=line(xp,yp,zp);
set(h1,'Color',[.7,0,0],'LineWidth',1.5)
hold off
grid on
xlabel('x')
ylabel('y')
zlabel('z')
title('Movimiento en una superficie cónica')
Movimiento sobre la superficie de revolución, z=arn
Consideremos una partícula de masa m que desliza sin rozamiento sobre la superficie de revolución, z=aρn. Estableceremos coordenadas cilíndricas. El vector posición y el vector velocidad de la partícula se expresan
La energía cinética de la partícula es
La energía poptencial
La lagrangiana
La ecuación del movimiento en la dirección radial,
La ecuación del movimiento en la dirección angular,
Energía
Hay una cantidad que se conserva, la componente Lz=mh del momento angular, la otra es la energia E de la partícula
La energía potencial efectiva es
Representamos la energía potencial efectiva para n=2 y h=2
a=1;
n=2; %exponente
h=2; %momento angular
E=11.8; %energía
f=@(x) h^2./(2*x.^2)+9.8*a*x.^n;
fplot(f, [0.1,1.2])
line([0,1.2],[E,E])
line([1,1],[0,E],'lineStyle','--')
line([0.4518,0.4518],[0,E],'lineStyle','--')
hold on
grid on
ylim([0,15])
xlabel('\rho')
ylabel('V(\rho)')
title('Energía potencial efectiva')
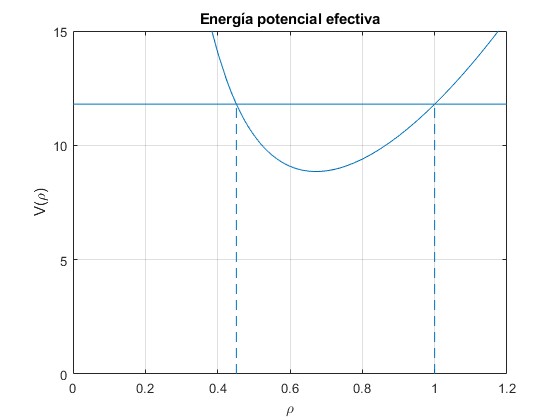
Supongamos que la partícula parte del reposo desde ρ0=1 m, la energía inicial vale
La energía en la posición inferior de retorno, dρ/dt=0
Una raíz de la ecuación bicuadrada es ρ1=1 m, la otra ρ1=0.4518 m tal como se aprecia en la figura anterior, la altura
>> x2=(11.8-sqrt(11.8^2-4*9.8*2))/(2*9.8) x2 = 0.2041 >> r1=sqrt(x2) r1 = 0.4518 >> z1=r1^2 z1 = 0.2041
Trayectorias
Resolvemos el sistema de dos ecuaciones diferenciales por el procedimiento
Tomamos a=1. Dado el valor del exponente n, fijamos el momento angular h. Las condiciones iniciales son, t=0, la posición inicial ρ=1, φ=0. La velocidad inicial dρ/dt=0 (parte del reposo)
Fijamos el valor del exponente n=2. Representamos la altura z de la partícula para varios valores del momento angular h.
a=1;
n=2; %exponente
hold on
% x(1)=r, x(2)=dr/dt,x(3)=phi
for h=[0.5,2,3]
fg=@(t,x)[x(2);(h^2/x(1)^3-9.8*a*n*x(1)^(n-1)-n^2*(n-1)*x(1)^(2*n-3)*x(2)^2)
/(1+n^2*x(1)^(2*n-2)); h/x(1)^2];
[t,x]=ode45(fg,[0,2],[1,0,0]);
z=a*x(:,1).^n;
plot(t, z,'displayName',num2str(h))
end
hold off
grid on
xlabel('t')
legend('-DynamicLegend','location','best')
ylabel('z')
title('Movimiento en una superficie')
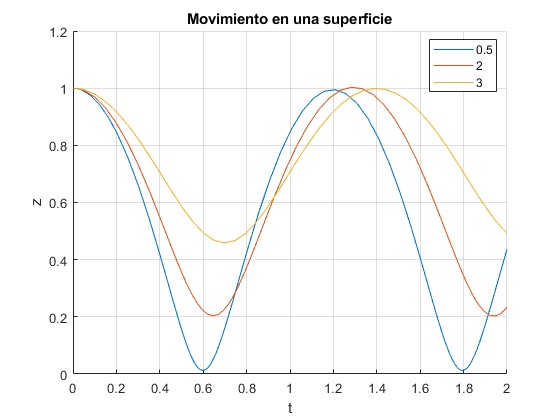
Hemos calculado la altura de la posición de retorno para h=2, z1=0.2041 m, que se alcanza en el instante t≈0.65 s, tal como se aprecia en la figura
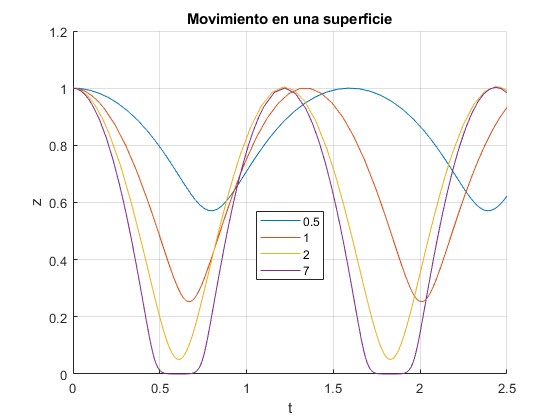
Fijamos el valor del momento angular h. Representamos la altura z de la partícula para varios valores del exponente n.
a=1;
h=1; %momento angular
hold on
% x(1)=r, x(2)=dr/dt,x(3)=phi
for n=[0.5,1,2,7]
fg=@(t,x)[x(2);(h^2/x(1)^3-9.8*a*n*x(1)^(n-1)-n^2*(n-1)*x(1)^(2*n-3)*x(2)^2)
/(1+n^2*x(1)^(2*n-2)); h/x(1)^2];
[t,x]=ode45(fg,[0,2.5],[1,0,0]);
z=a*x(:,1).^n;
plot(t, z,'displayName',num2str(n))
end
hold off
grid on
xlabel('t')
legend('-DynamicLegend','location','best')
ylabel('z')
title('Movimiento en una superficie')
Representamos la trayectoria de una partícula que desliza sin rozamiento sobre la superficie de revolución con n=2 y h=1
a=1;
n=2; %exponente
h=1; %momento angular
% x(1)=r, x(2)=dr/dt,x(3)=phi
fg=@(t,x)[x(2);(h^2/x(1)^3-9.8*a*n*x(1)^(n-1)-n^2*(n-1)*x(1)^(2*n-3)*x(2)^2)
/(1+n^2*x(1)^(2*n-2)); h/x(1)^2];
[t,x]=ode45(fg,[0,20],[1,0,0]);
xp=x(:,1).*cos(x(:,3));
yp=x(:,1).*sin(x(:,3));
zp=a*x(:,1).^n;
%energía
%E=((1+n^2*x(:,1).^(2*n-2)).*x(:,2).^2+h^2./x(:,1).^2)/2+9.8*a*x(:,1).^n;
hold on
%superficie cónica
phi=linspace(0,2*pi,40);
r=linspace(0,1.2);
[phi,r]=meshgrid(phi,r);
x=r.*cos(phi);
y=r.*sin(phi);
z=a*r.^n;
h1=mesh(x,y,z);
set(h1,'EdgeColor',[0.6,0.6,0.6], 'FaceAlpha',0.5,'EdgeAlpha',0.5)
%trayectoria
h1=line(xp,yp,zp);
set(h1,'Color',[.7,0,0],'LineWidth',1.5)
hold off
grid on
xlabel('x')
ylabel('y')
zlabel('z')
title('Movimiento en una superficie cónica')
view(120,70)
Representamos la trayectoria de la partícula para n=1/2
Representamos la trayectoria de la partícula para n=1, un superficie cónica
Referencias
Ricardo López-Ruiz, Amalio F Pacheco Sliding on the inside of a conical surface, Eur. J. Phys. 23 (2002) 579-589
D. G. Gómez-Pérez, O. González-Amezcua. The motion of a particle on the surface of a general cone. Revista Mexicana de Física E 21 010206 1–5. January-June 2024