

El péndulo elástico
Ecuaciones de Lagrange
Consideremos un péndulo formado por una partícula de masa m que puede deslizar a lo largo de una varilla de masa despreciable, que oscila en el plano vertical. La partícula está unida al centro de oscilación O mediante un muelle de constante k.
La figura muestra el estado del sistema en un instante t. El muelle se ha deformado z, de modo que su longitud es l+z y la varilla forma un ángulo θ con la vertical.
Situamos el origen y los ejes en el centro de oscilación O, la posición de la partícula es
Derivando respecto del tiempo, obtenemos las componentes de su velocidad
Su energía cinética es
Su energía potencial se compone de dos términos: la energía potencial gravitatoria y la energía potencial elástica del muelle deformado z
La lagrangiana es
Las ecuaciones del movimiento de Lagrange nos llevan al sistema de dos ecuaciones diferenciales. La primera es
La segunda ecuación diferencial es
Resolveremos este sistema de dos ecuaciones diferenciales con las siguientes condiciones iniciales
donde z0 es la deformación inicial del muelle y θ0 el ángulo inicial que forma la varilla con la vertical.
Casos particulares
En el caso de un muelle muy rígido. La segunda ecuación diferencial se escribe
La primera ecuación diferencial se reduce a la del movimiento de un péndulo simple de longitud l. La frecuencia de las oscilaciones de pequeña amplitud sinθ≈θ es
Cuando la varilla no se desvía de la posición de equilibrio, θ=0. La segunda ecuación diferencial se transfroma en
que es la ecuación del movimiento oscilatorio de una partícula unida a un muelle elástico. La frecuencia de la oscilación es
Posiciones de equilibrio
Igualando a cero las derivadas de z y θ respecto del tiempo t
La primera, corresponde a un equilibrio estable y la segunda a un equilibrio inestable.
Solución numérica de las ecuaciones del movimiento
Para resolver este sistema de ecuaciones diferenciales. Despejamos d2θ/dt2 en la primera ecuación y d2z/dt2 en la segunda
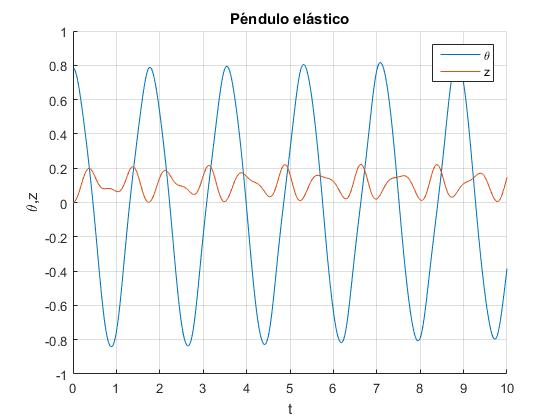
Elaboramos un script con los siguientes valores de los parámetros que podremos modificar: el cociente k/m=100, donde k es la constante del muelle y m la masa de la partícula, longitud del muelle sin deformar l=0.5. A continuación, las condiciones iniciales: Desplazamiento angular inicial del péndulo θ0=π/4, deformación inicial del muelle z0=0. Velocidadades iniciales a lo largo de la partícula en la dirección tangencial dθ/dt=0 y en la radial dz/dt=0.
Se resuelve el sistema de ecuaciones diferenciales mediante el procedimiento ode45, durante un tiempo de 10 s. Se representa la deformación del muelle z y la posición angular del péndulo θ en función del tiempo t.
k=100; %constante del muelle/masa partícula
L=0.5; %longitud del muelle sin deformar
%condiciones iniciales
x0=[pi/4,0,0,0]; %condiciones iniciales
tspan=[0,10];
% x(1)=theta, x(2)=dtheta/dt, x(3)=z; x(4)=dz/dt
fg=@(t,x)[x(2);-(9.8*sin(x(1))+2*x(2)*x(4))/(L+x(3)); x(4);
(L+x(3))*x(2)^2+9.8*cos(x(1))-k*x(3)];
[t,x]=ode45(fg,tspan,x0);
hold on
plot(t,x(:,1))
plot(t,x(:,3))
%plot(t,x(:,2))
%plot(t,x(:,4))
hold off
grid on
legend('\theta','z');
xlabel('t')
ylabel('\theta,z')
title('Péndulo elástico')
Comprobamos que la energía total E=T+V permanece constante
>> E=(x(:,4).^2+((L+x(:,3)).^2).*x(:,2).^2)/2 -9.8*(L+x(:,3)).*cos(x(:,1))+k*x(:,3).^2/2 E = -3.4648 -3.4648 -3.4648 -3.4648 -3.4648 -3.4648 ...
Actividades
En primer lugar, especificamos los parámetros del sistema
- El cociente k/m, la constante elástica k entre la masa m de la partícula, el control titulado Constante/masa
- La longitud del muelle sin deformar se ha fijado en l=0.5
En segundo lugar, especificamos las condiciones iniciales
- La desviación inicial θ0 del péndulo en grados, en el control titulado Angulo péndulo
- La deformación inicial del muelle z0, en el control titulado Deformación muelle
- La velocidades iniciales de la partícula a lo largo de la dirección tangencial dθ/dt=0 y radial dz/dt=0
Si queremos ver las gráficas de la deformación z del muelle (en color azul) y la posición angular θ del péndulo (en color rojo), activamos la casilla titulada Gráfica
Se resuelve el sistema de dos ecuaciones diferenciales por el procedimiento de Runge-Kutta. El programa calcula la energía del sistema E en cada instante y lo compara con la energía inicial E0. Si la desviación es mayor que el 1% el programa se detiene.
Segunda ley de Newton
Colocamos muelle elástico de constante k y longitud L0 sin deformar en posición vertical, lo fijamos por el extremo superior y colocamos una partícula de masa m en su extremo libre inferior.
El muelle elástico se estira una longitud ye=mg/k, la longitud del muelle es Le=L0+ye.
Situamos el origen del sistema de coordenadas en la posición de la partícula en equilibrio. Desplazamos la partícula a la posición (x0, y0) y la soltamos. Cuando la partícula está en la posición (x, y), la longitud del muelle deformado es L, las fuerzas sobre la partícula son:
- La fuerza T que ejerce el muelle deformado
- El peso mg de la partícula
Aplicamos la segunda ley de Newton
Sustituyendo T=k(L-L0), mg=k(Le-L0), y teniendo en cuenta que sinθ=x/L, y cosθ=(Le-y)/L, el sistema de ecuaciones diferenciales se escribe en función de la posición (x, y) de la partícula.
La longitud del muelle deformado es
Es importante hacer notar, que la no linealidad de las ecuaciones diferenciales procede de la geometría no del muelle cuyo comportamiento se supone lineal.
Se resuelve el sistema de ecuaciones diferenciales por procedimientos numéricos con las siguientes condiciones iniciales: en el instante t=0, la posición inicial es x0, y0, y parte del reposo.
Aproximaciones
Cuando los desplazamientos x e y de la posición de equilibrio son pequeños en comparación con la longitud del muelle L0, el sistema de ecuaciones diferenciales se puede expresar de forma más simple.
En la primera ecuación diferencial, el término
La primera ecuación diferencial, se escribe
En la segunda ecuación diferencial, el término
La segunda ecuación diferencial, se escribe
Definimos ωx la frecuencia de oscilación a largo del eje X, ωy la frecuencia de oscilación a lo largo del eje Y, y λ la constante de proporcionalidad del acoplamiento como
El sistema de dos ecuaciones diferenciales de segundo orden acopladas queda
-
La frecuencia ωx corresponde a las oscilaciones de un péndulo de longitud Le.
-
La frecuencia ωy corresponde a las oscilaciones de una masa m unida a un muelle elástico de constante k.
Supongamos que comenzamos a hacer oscilar la partícula muy próxima al eje Y, con x<<y. La solución de la segunda ecuación diferencial (se desprecia el término λx2) es, aproximadamente
y=Acos(ωy·t)
La primera ecuación diferencial se convierte en
Esta ecuación diferencial se denomina del tipo Mathieu. Cuando
la solución es inestable incluso para pequeños valores del parámetro A (amplitud de la oscilación a lo largo del eje Y). Cuando menor sea n, más pronunciada es la inestabilidad. Así, para n=1, la relación entre las frecuencias angulares es
ωy=2ωx.
Los valores de la constante elástica k, de la longitud L0 del muelle sin deformar, y de la masa m de la partícula que hacen que se cumpla esta relación son
Energía del sistema
En la situación inicial, t=0, la partícula unida al muelle elástica se libera (v=0) en la posición (x0, y0). Situamos el nivel cero de energía potencial Ep=0, en la posición de la partícula cuando se encuentra en equilibrio, tal como se muestra en la figura.
La energía inicial es
En el instante t la partícula se encuentra en la posición (x, y) y lleva una velocidad
La energía del sistema es
Actividades
Se introduce
-
La constante elástica k del muelle en N/m, en el control titulado Constante k
-
La masa m de la partícula, en g, en el control titulado Masa
-
La longitud del muelle sin deformar se ha fijado en L0=1 m
- Las coordenadas x0 e y0 de la posición inicial de la partícula en los controles titulados Posición x y Posición y
Se pulsa el botón titulado Nuevo
Se observa el movimiento de la partícula y su trayectoria
Ejemplo:
- La masa de la partícula m=300g=0.3 kg
- La longitud del muelle L0=1.0 m
El valor de la constante k del muelle que hace que ωy=2ωx es k=8.82 N/m
En la posición de equilibrio el muelle se deforma ye=mg/k=1/3 m. La longitud del muelle en la posición de equilibrio es Le=1+1/3=4/3 m
Si partimos de una posición inicial muy próxima al eje vertical Y, por ejemplo, x0=0.01 m e y0=0.0, observamos como crecen las oscilaciones hacia uno y otro lado del eje vertical, del tipo péndulo, y disminuyen las oscilaciones tipo muelle. Luego, sucede el proceso inverso.
En la parte superior, se muestra la energía total de la partícula y la posición de la partícula (x, y) de la partícula en cada instante t.
En la parte derecha, se representan los tres tipos de energías mediante un diagrama de barras:
- energía cinética (color rojo)
- energía potencial gravitatoria (en color azul)
- energía potencial elástica (en color verde)
La suma de las tres clases de energía se mantiene constante.
Referencias
Del segundo apartado
Rusbridge M.G., Motion of the sprung pendulum. Am. J. Phys. 48 (2) February 1980, pp. 146-151.
Olsson M. G. Why does a mass on a spring sometimes misbehave?. Am. J. Phys. 44 (12) December 1976, pp. 1211-1212.