

Funciones de variable compleja
Curvas en el plano complejo
z(t)=x(t)+i·y(t) con a≤t≤b describe una curva en el plano complejo dependiente de un parámetro t que va desde z(a)=x(a)+i·y(a) hasta z(b)=x(b)+i·y(b). Si z(a)=z(b) la curva es cerrada.
La ecuación del segmento de una recta que une los puntos z0y z1 es
z=z0+(z1-z0)·t con 0≤t≤1.
La ecuación de la recta que une los puntos z0 y z1es
z=z0+(z1-z0)·t con -∞<t<∞.
La ecuación de la recta paralela al eje Y que pasa por x0=1 es z=1+i·y, con -∞<y<∞.
Los puntos de una circunferencia z equidistan de su centro z0 una longitud igual a su radio r, de modo que |z-z0|=r
Una circunferencia centrada en z0 y de radio r tiene la siguiente ecuación
La ecuación de una elipse centrda en el origen y de semiejes a y b se escribe
z=a·cos(t)+i·b·sin(t), con 0≤t≤2π
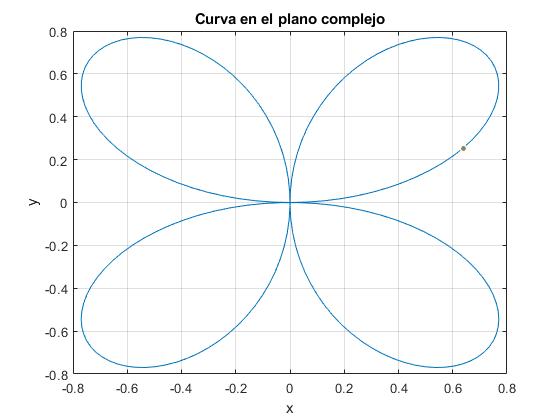
Dibujamos la curva cerrada z(t)=sin(2t)·cos(t)+i·sin(2t)·cos(t) con 0≤t≤2π
t=linspace(0,2*pi,200);
z=sin(2*t).*(cos(t)+1i*sin(t));
plot(z)
grid on
xlabel('x')
ylabel('y')
title('Curva en el plano complejo')
Funciones de variable compleja
La expresión z2-(2+i)z se puede evaluar para cualquier número complejo z y da como resultado un número complejo. Definimos la función f(z)=z2-(2+i)z y calculamos el valor de la función por ejemplo, para z=1+i.
f(1+i)=(1+i)2-(2+i)·(1+i)=-1-i
>> f=@(z) z^2-(2+1i)*z; >> f(1+1i) ans = -1.0000 - 1.0000i
La expresión i+2·Re(z) también define una función de variable compleja. Definimos la función g(z)=i+2·Re(z) y calculamos el valor de la función, por ejemplo, para z=i.
g(i)=i+2·Re(i)=i+2·0=i
>> g=@(z) 1i+real(z); >> g(1i) ans = 0 + 1.0000i
Expresamos una función f(z) de variable compleja en términos de dos funciones u(x,y) y v(x,y) de variable real
f(z)=f(x+iy)=u(x,y)+i·v(x,y)
Por ejmplo, la función f(z)=z2=(x+iy)2=x2-y2+2xyi. Así pues, u(x,y)==x2-y2 y v(x,y)=2xy
>> syms x y z; >> f=z^2; >> fxy=subs(f,z,x+1i*y) fxy =(x + y*1i)^2 >> expand(fxy) ans =x^2 + x*y*2i - y^2
En una función de variable real y=f(x) a la abscisa x le correponde la ordenada y. Una gráfica de la función y=f(x) en el intervalo a<x<b está definida por el conjunto de puntos (x,f(x)) del plano.
Sin embargo, w=f(z) es una función de variable compleja. A cada punto del plano z=x+iy le corresponde un punto del plano w=u+iv que denominaremos imagen.
![]()
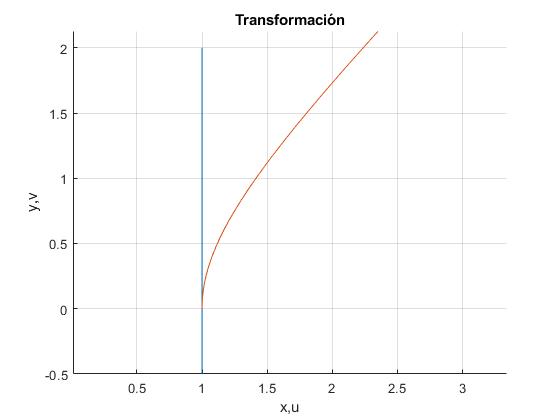
Transformada de una recta paralela al eje Y, w=z2
Sea la recta paralela al eje Y, x=1 (en color azul en la figura), vamos a determinar como sería su imagen bajo la transformación w=z2 (en color rojo en la figura)
La ecuación de los puntos de la recta es z=1+iy. Por lo que w=z2=(1+iy)2=1-y2+2yi
u=1-y2, v=2y con -∞<y<∞. Se trata de la ecuación de una curva dependiente del parámetro y. Eliminamos y, y obtenemos la ecuación de una parábola en el plano u,v.
syms y;
z=1+1i*y; %recta
w=z^2; %imagen
hold on
fplot(real(z),imag(z),[-4,4])
fplot(real(w),imag(w),[-2,2]);
hold off
grid on
axis equal
title('Transformación')
ylabel('y,v')
xlabel('x,u')
![]()
Transformada de una recta paralela al eje Y,
Sea la recta paralela al eje Y, x=a (en color azul en la figura), vamos a determinar como sería su imagen bajo la transformación (en color rojo en la figura)
La ecuación de los puntos de la recta es z=a+iy, con a=1.
Obtenemos la ecuación de una hipérbola, probar cuando a es negativo o nulo.
syms y;
a=1;
z=a+1i*y; %recta
w=sqrt(z); %imagen
hold on
fplot(real(z),imag(z),[-0.5,2])
fplot(real(w),imag(w),[0,10]);
hold off
grid on
axis equal
title('Transformación')
ylabel('y,v')
xlabel('x,u')
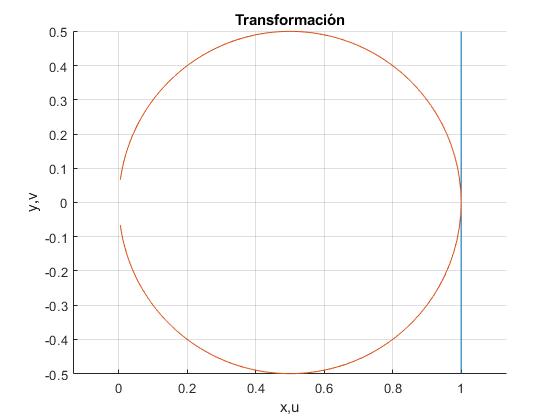
Transformada de una recta paralela al eje Y, w=1/z
Eliminamos y para realacionar u y v.
La transformada es una circunferencia centrada en u=1/2, v=0 y de radio 1/2
syms y;
z=1+1i*y; %recta
w=1/z; %imagen
hold on
fplot(real(z),imag(z),[-0.5,0.5])
fplot(real(w),imag(w),[-15,15]);
hold off
grid on
axis equal
title('Transformación')
ylabel('y,v')
xlabel('x,u')
El parámetro y se extiende desde -∞ a +∞, pero fplot no dibuja bien la circunferencia para valores grandes de y.
Transformada de un segmento de recta, w=iz
La ecuación de la recta que une los puntos z0=-1 y z1=i es z=-1+(i+1)t con 0≤t≤1.
Transformamos este segmento de recta mediante la función w=iz
w=-i+(-1+i)·t
que es un segmento de recta que pasa por z0=-i, z1=-1, tal como vemos en la figura (en color rojo)
syms t;
z=-1+(1i+1)*t; %recta
w=1i*z; %imagen
hold on
fplot(real(z),imag(z),[0,1])
fplot(real(w),imag(w),[0,1]);
hold off
grid on
axis equal
title('Transformación')
ylabel('y,v')
xlabel('x,u')
![]()
Transformada de un arco de circunferencia, w=z2
Vamos a transformar un cuadrante de la circunferencia centrada en el origen y de radio r=2, mediante la función w=z2
Cada punto del arco de circunferencia de radio r=2 y de extensión 0≤θ≤π/2, (en color azul), cuando se transforma adquiere un módulo de r=22=4, el argumento θ del punto pasa a valer 2θ después de la transformación. El resultado final es un arco de circunferencia de radio r=4 que se extiende de 0≤θ≤π es decir, una semicircuferencia.
syms t;
z=2*(cos(t)+1i*sin(t)); %arco
w=z^2; %imagen
hold on
fplot(real(z),imag(z),[0,pi/2]);
fplot(real(w),imag(w),[0,pi/2]);
hold off
grid on
axis equal
title('Transformación')
ylabel('v')
xlabel('u')
![]()
Transformación lineal
Las transformaciones más importantes son: traslación, rotación y ampliación
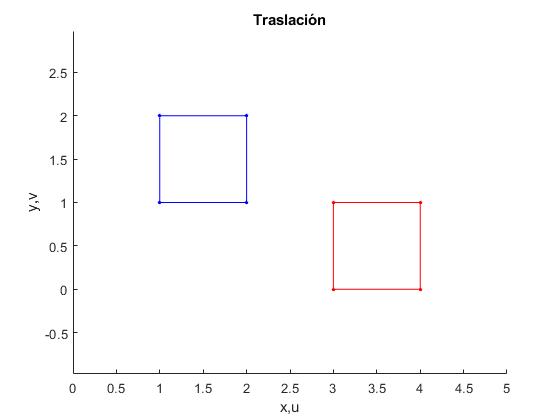
Traslación
Una traslación es la transformación lineal T(z)=z+b
T(z)=(x+iy)+(x0+iy0)=x+x0+i(y+y0)
Sea el cuadrado de vértices 1+i, 2+i, 2+2i,1+2i en color azul en la figura de la izquierda . Lo trasladamos mediante la transformación T(z)=z+2-i, obtenemos el cuadrado de vértices 3, 4, 4+i, 3+i que vemos de color rojo en la figura de la derecha.
T=@(z) z+(2-1i);
sq=[1+1i,2+1i,2+2*1i,1+2*1i]
sqt=T(sq)
hold on
plot(real(sq),imag(sq),'bo','markersize',2,'markerfacecolor','b')
plot(real(sqt),imag(sqt),'ro','markersize',2,'markerfacecolor','r')
sq=[sq,sq(1)]; %para cerrar el cuadrado
sqt=[sqt,sqt(1)];
plot(real(sq),imag(sq),'b')
plot(real(sqt),imag(sqt),'r')
hold off
axis equal
xlim([0,5])
title('Traslación')
xlabel('x,u')
ylabel('y,v')
En la ventana de comandos vemos el resultado de la transformación.
sq = 1.0000 + 1.0000i 2.0000 + 1.0000i 2.0000 + 2.0000i 1.0000 + 2.0000i sqt = 3.0000 4.0000 4.0000 + 1.0000i 3.0000 + 1.0000i
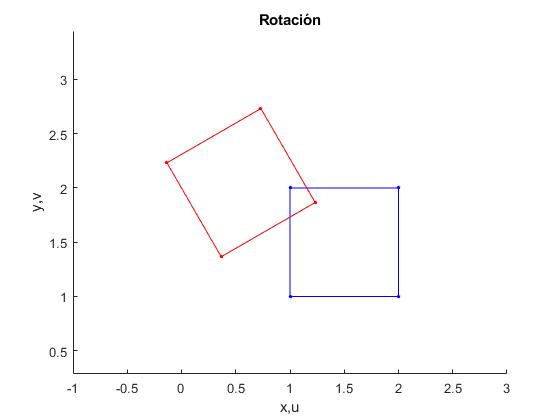
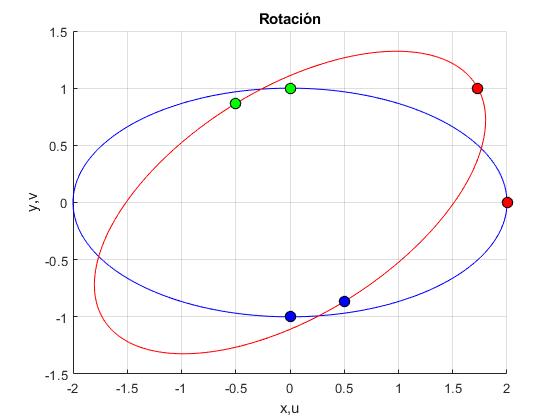
Rotación
Una rotación es la transformación R(z)=az con |a|=1
En forma polar escribimos
Se trata de un número complejo del mismo módulo r que z pero cuyo argumento es θ+φ.
Sea el cuadrado de vértices 1+i, 2+i, 2+2i,1+2i en color azul. Lo rotamos mediante la transformación
Obtenemos el cuadrado de color rojo de la figura girando π/6 (30°) alrededor del origen, cada uno de los vértices del cuadrado de color azul en el sentido contrario a las agujas del reloj.
R=@(z) (sqrt(3)+1i)*z/2;
sq=[1+1i,2+1i,2+2*1i,1+2*1i]
sqt=R(sq)
hold on
plot(real(sq),imag(sq),'bo','markersize',2,'markerfacecolor','b')
plot(real(sqt),imag(sqt),'ro','markersize',2,'markerfacecolor','r')
sq=[sq,sq(1)];
sqt=[sqt,sqt(1)];
plot(real(sq),imag(sq),'b')
plot(real(sqt),imag(sqt),'r')
hold off
axis equal
xlim([-1,3])
title('Rotación')
xlabel('x,u')
ylabel('y,v')
En la ventana de comandos vemos el resultado de la transformación
sq = 1.0000 + 1.0000i 2.0000 + 1.0000i 2.0000 + 2.0000i 1.0000 + 2.0000i sqt = 0.3660 + 1.3660i 1.2321 + 1.8660i 0.7321 + 2.7321i -0.1340 + 2.2321i
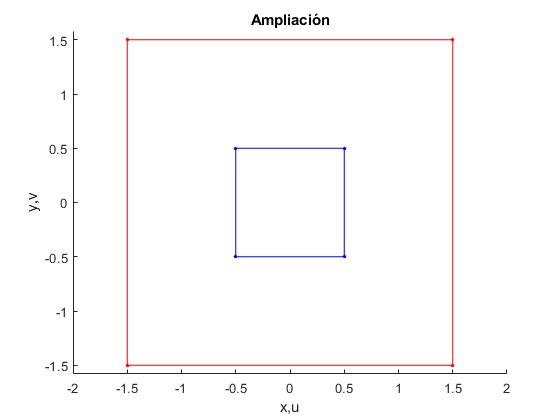
Ampliación
Una ampliación es la transformación M(z)=az con a>0
En forma polar escribimos
El módulo del número complejo z se multiplica por el número real a, pero el argumento no cambia
Sea el cuadrado centrado en el origen de vértices 1/2+i/2, -1/2+i/2, -1/2-i/2,1/2-i/2 en color azul. Lo ampliamos tres veces mediante la transformación M(z)=3·z
M=@(z) 3*z;
sq=[1+1i,-1+1i,-1-1i,1-1i]/2
sqt=M(sq)
hold on
plot(real(sq),imag(sq),'bo','markersize',2,'markerfacecolor','b')
plot(real(sqt),imag(sqt),'ro','markersize',2,'markerfacecolor','r')
sq=[sq,sq(1)];
sqt=[sqt,sqt(1)];
plot(real(sq),imag(sq),'b')
plot(real(sqt),imag(sqt),'r')
hold off
axis equal
xlim([-2,2])
title('Ampliación')
xlabel('x,u')
ylabel('y,v')
En la ventana de comandos vemos el resultado de la transformación
sq = 0.5000 + 0.5000i -0.5000 + 0.5000i -0.5000 - 0.5000i 0.5000 - 0.5000i sqt = 1.5000 + 1.5000i -1.5000 + 1.5000i -1.5000 - 1.5000i 1.5000 - 1.5000i
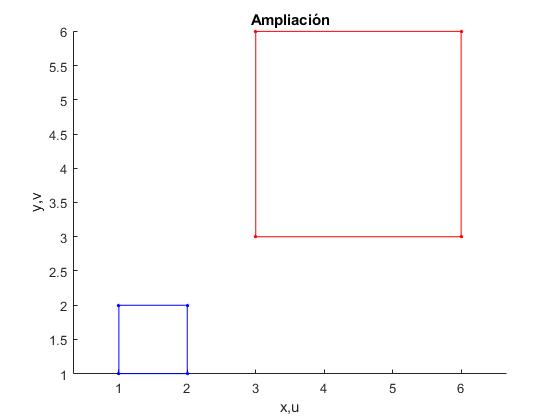
Sea el cuadrado de vértices 1+i, 2+i, 2+2i,1+2i en color azul, este cuadrado no está centrado en el origen. El resultado de aplicar la transformación Ampliación M(z)=3·z es el siguiente:
M=@(z) 3*z;
sq=[1+1i, 2+1i, 2+2i,1+2i];
sqt=M(sq);
hold on
plot(real(sq),imag(sq),'bo','markersize',2,'markerfacecolor','b')
plot(real(sqt),imag(sqt),'ro','markersize',2,'markerfacecolor','r')
sq=[sq,sq(1)];
sqt=[sqt,sqt(1)];
plot(real(sq),imag(sq),'b')
plot(real(sqt),imag(sqt),'r')
hold off
axis equal
title('Ampliación')
xlabel('x,u')
ylabel('y,v')
Transformación lineal
Una transformación lineal es una combinación de rotación, traslación y ampliación.
- la ampliación es el módulo de a,
- la rotación un ángulo θ es el argumento de a,
- la traslación es b.
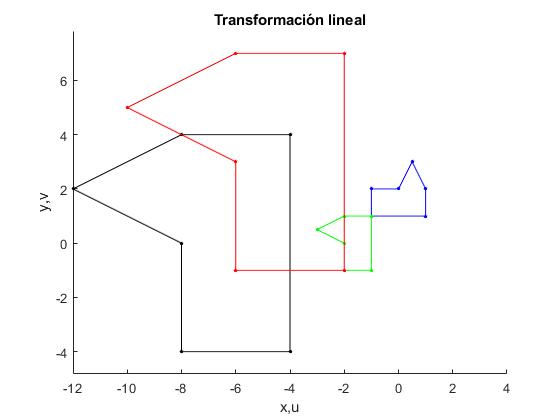
Sea el polígono de vértices -1+i, 1+i, 1+2i, 1/2+3i, 2i,-1+2i, se le aplica la transformación lineal f(z)=4iz+(2+3i)
- En primer lugar, aplicamos la transformación Rotación R(z). Giramos el rectángulo inicial (en color azul), π(90°) el resultado lo dibujamos en color verde.
- A continuación, aplicamos la transformación Ampliación M(z). Ampliamos cuatro veces el rectángulo resultante, el resultado lo dibujamos en color negro.
- Finalmente, aplicamos la transformación Traslación T(z). Trasladamos el rectángulo b=2+3i, el resultado lo dibujamos en color rojo.
%f=@(z) 4*i*z+2+3*i; %transformación lineal
R=@(z) 1i*z; %rotación
M=@(z) 4*z; %ampliación
T=@(z) z+(2+3*1i); %traslación
r=[-1+1i,1+1i,1+2*1i,1/2+3*1i,2*1i,-1+2*1i];
hold on
%rectángulo inicial
plot(real(r),imag(r),'bo','markersize',2,'markerfacecolor','b')
s=[r,r(1)];
plot(real(s),imag(s),'b')
%rotación
rt=R(r);
plot(real(rt),imag(rt),'go','markersize',2,'markerfacecolor','g')
s=[rt,rt(1)];
plot(real(s),imag(s),'g')
%ampliación
rt=M(rt);
plot(real(rt),imag(rt),'ko','markersize',2,'markerfacecolor','k')
s=[rt,rt(1)];
plot(real(s),imag(s),'k')
%traslación
rt=T(rt);
plot(real(rt),imag(rt),'ro','markersize',2,'markerfacecolor','r')
s=[rt,rt(1)];
plot(real(s),imag(s),'r')
hold off
axis equal
xlim([-12,4])
title('Transformación lineal')
xlabel('x,u')
ylabel('y,v')
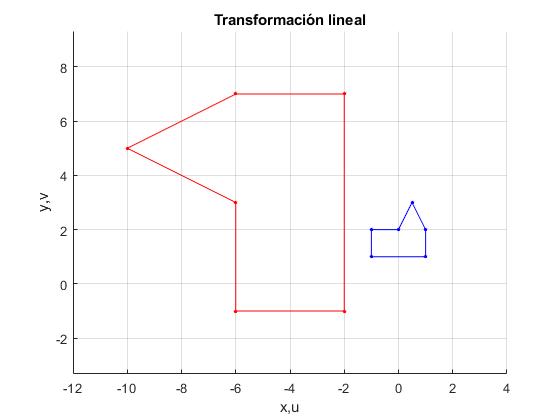
Eliminamos los pasos intermedios y dibujamos el rectángulo inicial y el resultado de aplicarle la transformación lineal f(z)=4iz+(2+3i).
f=@(z) 4*1i*z+2+3*1i; %transformación lineal
hold on
r=[-1+1i,1+1i,1+2*1i,1/2+3*1i,2*1i,-1+2*1i];
%rectángulo inicial
plot(real(r),imag(r),'bo','markersize',2,'markerfacecolor','b')
s=[r,r(1)];
plot(real(s),imag(s),'b')
%transformación lineal
rt=f(r);
plot(real(rt),imag(rt),'ro','markersize',2,'markerfacecolor','r')
s=[rt,rt(1)];
plot(real(s),imag(s),'r')
hold off
grid on
axis equal
xlim([-12,4])
title('Transformación lineal')
xlabel('x,u')
ylabel('y,v')
Ejercicio
Dibujar una elipse de semiejes 2 y 1 centrada en el origen. Girarla 30° en el sentido contrario a las agujas del reloj
f=@(t) 2*cos(t)+1i*sin(t);
t=(0:360)*pi/180;
hold on
plot(real(f(t)),imag(f(t)),'b') %original
fg=exp(1i*pi/6)*f(t);
plot(real(fg),imag(fg),'r'); %girada
color=['r','g','b']; %tres puntos
z=[2,1i,-1i];
z1=z*exp(1i*pi/6);
for k=1:length(z)
plot(real(z(k)),imag(z(k)),'ko','markersize',8,'markerfacecolor',color(k));
plot(real(z1(k)),imag(z1(k)),'ko','markersize',8,'markerfacecolor',color(k));
end
hold off
grid on
xlabel('x,u')
ylabel('y,v')
title('Rotación')
En estos ejemplos, veremos el aspecto de la imagen (u,v) de una rejilla en el plano (x,y) como resultado de la aplicación de varias transformaciones w=f(z)
w=z2
En sección anterior, ya hemos visto la imagen bajo esta transformación de una recta paralela al eje Y, el resultado era una parábola.
hold on
for x=0:0.25:0.5 %líneas horizontales
line([x,x],[0,2],'color','b')
end
for x=0.125:0.25:0.5-0.125
line([x,x],[0,2],'color','r');
end
for y=0:0.25:2 %líneas verticales
line([0,0.5],[y,y],'color','b')
end
for y=0.125:0.25:2-0.125
line([0,0.5],[y,y],'color','r');
end
x=[0.5,0.5,0]; %tres puntos
y=[0,2,2];
color=['r','g','b'];
for k=1:length(x)
plot(x(k),y(k),'ko','markersize',8,'markerfacecolor',color(k))
end
hold off
axis equal
ylim([-0.1,2.1])
xlabel('x')
ylabel('y')
title('original')
![]()
syms x y z;
f=z^2;
hold on
x=0:0.25:0.5; %líneas horizontales
z1=x+1i*y;
ff=subs(f,z,z1);
for k=1:length(x)
fplot(real(ff(k)),imag(ff(k)),[0,2],'color','b')
end
x=0.125:0.25:0.5-0.125;
z1=x+1i*y;
ff=subs(f,z,z1);
for k=1:length(x)
fplot(real(ff(k)),imag(ff(k)),[0,2],'color','r');
end
clear x;
syms x;
y=0:0.25:2; %líneas verticales
z1=x+1i*y;
ff=subs(f,z,z1);
for k=1:length(y)
fplot(real(ff(k)),imag(ff(k)),[0,0.5],'color','b')
end
y=0.125:0.25:2-0.125;
z1=x+1i*y;
ff=subs(f,z,z1);
for k=1:length(y)
fplot(real(ff(k)),imag(ff(k)),[0,0.5],'color','r');
end
z1=[1/2,1/2+2*1i,2*1i]; %tres puntos
ff=subs(f,z,z1);
color=['r','g','b'];
for k=1:length(z1)
plot(real(ff(k)),imag(ff(k)),'ko','markersize',8,'markerfacecolor',color(k))
end
hold off
axis equal
xlabel('u')
ylabel('v')
title('f(z)=z^2')
![]()
En la página anterior, ya hemos visto la imagen bajo esta transformación de una recta paralela al eje Y, el resultado era una hipérbola.
hold on
for x=-9:2:9; %líneas verticales
line([x,x],[0,9],'color','b')
end
for x=-8:2:8;
line([x,x],[0,9],'color','r');
end
for y=0:2:8; %líneas horizontales
line([-9,9],[y,y],'color','b')
end
for y=1:2:9;
line([-9,9],[y,y],'color','r');
end
x=[9,0,9]; %tres puntos
y=[0,9,9];
color=['r','g','b'];
for k=1:length(x)
plot(x(k),y(k),'ko','markersize',8,'markerfacecolor',color(k))
end
hold off
axis equal
xlim([-9.1,9.1])
xlabel('x')
ylabel('y')
title('original')
![]()
syms x y z;
f=sqrt(z);
hold on
x=-9:2:9; %líneas verticales
z1=x+1i*y;
ff=subs(f,z,z1);
for k=1:length(x)
fplot(real(ff(k)),imag(ff(k)),[0,9],'color','b')
end
x=-8:2:8;
z1=x+1i*y;
ff=subs(f,z,z1);
for k=1:length(x)
fplot(real(ff(k)),imag(ff(k)),[0,9],'color','r');
end
clear x;
syms x;
y=0:2:8; %líneas horizonatales
z1=x+1i*y;
ff=subs(f,z,z1);
for k=1:length(y)
fplot(real(ff(k)),imag(ff(k)),[-9,9],'color','b')
end
y=1:2:9;
z1=x+1i*y;
ff=subs(f,z,z1);
for k=1:length(y)
fplot(real(ff(k)),imag(ff(k)),[-9,9],'color','r');
end
z1=[9,9*1i,9+9*1i]; %tres puntos
ff=subs(f,z,z1);
color=['r','g','b'];
for k=1:length(z1)
plot(real(ff(k)),imag(ff(k)),'ko','markersize',8,'markerfacecolor',color(k))
end
hold off
axis equal
xlabel('u')
ylabel('v')
title('f(z)=sqrt(z)')
![]()
w=z5+4z2-6
Como ejercicio final de esta página, vamos a explorar la función f(z)=z5+4z2-6 y dibujar la región cuadriculada y su imagen mediante f(z).
hold on
for x=0:0.1:1 %líneas verticales
line([x,x],[0,1],'color','b')
end
for y=0:0.1:1 %líneas horizontales
line([0,1],[y,y],'color','r');
end
x=[1,1,1]; %tres puntos
y=[0,0.5,1];
color=['r','g','b'];
for k=1:length(x)
plot(x(k),y(k),'ko','markersize',8,'markerfacecolor',color(k))
end
hold off
axis equal
axis([-0.1,1.1,-0.1,1.1])
xlabel('x')
ylabel('y')
title('original')
![]()
%transformada
clear
syms x y z;
f=z^5+4*z^2-6;
x=0:0.1:1;
z1=x+1i*y;
ff=subs(f,z,z1);
hold on
for k=1:length(x)
fplot(real(ff(k)),imag(ff(k)),[0,1],'color','b')
end
clear x;
syms x;
y=0:0.1:1;
z1=x+1i*y;
ff=subs(f,z,z1);
for k=1:length(y)
fplot(real(ff(k)),imag(ff(k)),[0,1],'color','r');
end
z1=[1,1+1i/2,1+1i];
ff=subs(f,z,z1);
color=['r','g','b'];
for k=1:length(z1)
plot(real(ff(k)),imag(ff(k)),'ko','markersize',8,'markerfacecolor',color(k))
end
hold off
axis equal
xlabel('u')
ylabel('v')
title('f(z)=z^5+4·z^2-6')
![]()
hold on
t=(0:2:90)*pi/180; %arcos
for r=0:0.1:1
plot(r*cos(t),r*sin(t),'b')
end
for r=0.05:0.1:0.95
plot(r*cos(t),r*sin(t),'r')
end
t=(0:15:90)*pi/180; %líneas radiales
for k=1:length(t)
line([0,cos(t(k))],[0,sin(t(k))],'color','b');
end
t=(7.5:15:90-7.5)*pi/180;
for k=1:length(t)
line([0,cos(t(k))],[0,sin(t(k))],'color','r');
end
t=(0:45:90)*pi/180; %tres puntos
color=['r','g','b'];
for k=1:length(t)
plot(cos(t(k)),sin(t(k)),'ko','markersize',8,'markerfacecolor',color(k))
end
hold off
axis equal
ylim([-0.05,1.05])
xlabel('x')
ylabel('y')
title('original')
![]()
Ahora, la rejilla está formada por arcos de circunferencia y líneas radiales de longitud la unidad, vamos a explorar su transformación bajo la función f(z)=z5+4z2-6.
clear
syms t z;
f=z^5+4*z^2-6;
r=0:0.1:1; %arcos
z1=r*(cos(t)+1i*sin(t));
ff=subs(f,z,z1);
hold on
for k=1:length(r)
fplot(real(ff(k)),imag(ff(k)),[0,pi/2],'color','b')
end
r=0.05:0.1:0.95;
z1=r*(cos(t)+1i*sin(t));
ff=subs(f,z,z1);
hold on
for k=1:length(r)
fplot(real(ff(k)),imag(ff(k)),[0,pi/2],'color','r');
end
ang=(0:15:90)*pi/180; %líneas radiales
z1=(cos(ang)+1i*sin(ang))*t;
ff=subs(f,z,z1);
for k=1:length(ang)
fplot(real(ff(k)),imag(ff(k)),[0,1],'color','b');
end
ang=(7.5:15:90-7.5)*pi/180;
z1=(cos(ang)+1i*sin(ang))*t;
ff=subs(f,z,z1);
for k=1:length(ang)
fplot(real(ff(k)),imag(ff(k)),[0,1],'color','r');
end
z1=[1,cos(pi/4)+1i*sin(pi/4),1i]; %tres puntos
ff=subs(f,z,z1);
color=['r','g','b'];
for k=1:length(z1)
plot(real(ff(k)),imag(ff(k)),'ko','markersize',8,'markerfacecolor',color(k))
end
hold off
axis equal
xlabel('u')
ylabel('v')
title('f(z)=z^5+4·z^2-6')
![]()