Rectas y planos
Recta en el espacio (3D)
Una recta viene determinada por un punto A (x0,y0,z0) y un vector , cuya dirección es la recta que pasa por los puntos A y P (x,y,z). Llamando al vector de origen A y extremo P, tendremos que
Considérese la recta r que pasa por el punto A (2,1,3) y tiene por vector director (-1,1,2). Sus ecuaciones paramétricas son
El punto P(1,2,3) no está en la recta, pues el sistema
es incompatible. En cambio, el punto Q(-1,4,9) si está en la recta
t=[-0.5,3.5];
hold on
line(2-t,1+t,3+2*t)
plot3(2,1,3,'ro','markersize',4,'markerfacecolor','r');
plot3(1,2,3,'bo','markersize',4,'markerfacecolor','b');
plot3(-1,4,9,'bo','markersize',4,'markerfacecolor','b');
grid on
xlabel('x')
ylabel('y')
zlabel('z')
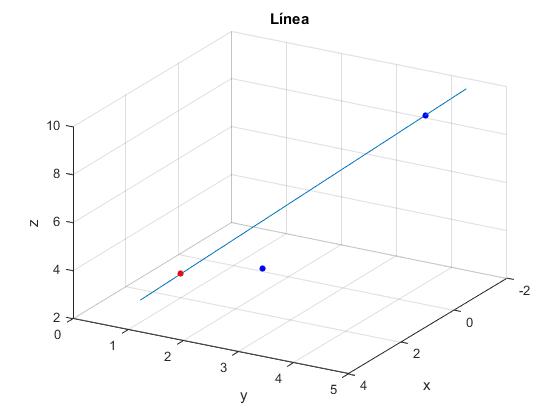
title('Línea')
hold off
view(120,30)
En la figura, vemos el punto A de color rojo, los puntos P y Q de color azul, P no pertenece a la recta y Q si pertenece.
Seleccionado en el menú Tools/Rotate 3D o el icono, señalado en color rojo
![]()
con el ratón establecemos distintas vistas view de la figura tridimensional. A medida que actuamos con el puntero del ratón, en la parte inferior izquierda de la ventana, se muestran dos números
La eliminación del parámetro t da lugar a un sistema de dos ecuaciones lineales independientes
Por ejemplo, escribimos las ecuaciones paramétricas de la recta del ejemplo anterior, alternativamente
x=[-1,3];
y=3-x;
z=7-2*x;
line(x,y,z)
grid on
xlabel('x')
ylabel('y')
zlabel('z')
title('Recta')
view(120,30)
Obtenemos un representación gráfica similar de la recta
En general, escribimos la ecuación de la recta
donde el rango de la matriz A es dos. En el ejemplo, anterior
>> A=[1,1,0;2,0,1]; >> rank(A) ans = 2
Recta que pasa por dos puntos
Hallar la ecuación de la recta que pasa por los puntos, A(2,-1 3) y B(5,0,4),.
A es el punto de coordenadas (x0,y0,z0) y el vector tiene origen en A y extremo en B
x0=2, y0=-1; z0=3, ux=5-2, uy=0-(-1),uz=4-3
>> ezplot3('2+3*t','-1+t','3+t',[-1,3])
>> view(120,30)
ezplot3 representa en tres dimensiones una función expresada en términos de un parámetro t: x(t), y(t) y z(t) en el intervalo 0<t<2π, por defecto o bien, en el intervalo [tmin,tmax] que se le indique explícitamente.
Plano en el espacio (3D)
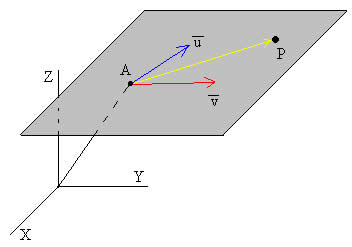
Para calcular la ecuación de un plano en el espacio 3D es necesario conocer un punto A (x0,y0,z0) y dos vectores y linealmente independientes. Llamamos al vector de origen A y extremo P (x,y,z)
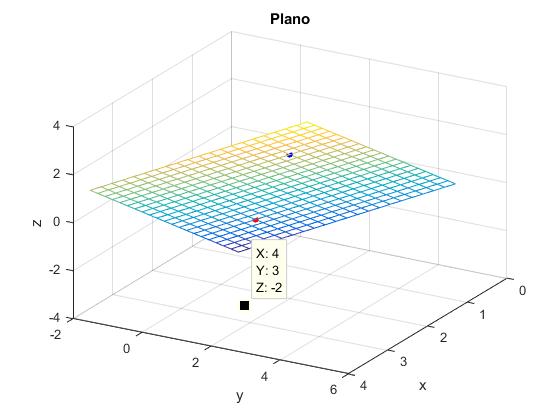
Considérese el plano que pasa por el punto A(2,1,-1) y tiene por vectores directores (1,-1,2) y (-1,2,1). Sus ecuaciones paramétricas son:
tt=-0.5:0.1:1.5;
ss=-0.5:0.1:1.5;
hold on
[s,t]=meshgrid(ss,tt);
mesh(2+t-s,1-t+2*s,-1+2*t+s)
plot3(2,1,-1,'ro','markersize',4,'markerfacecolor','r');
plot3(4,3,-2,'bo','markersize',4,'markerfacecolor','b');
plot3(2,2,2,'bo','markersize',4,'markerfacecolor','b');
grid on
xlabel('x')
ylabel('y')
zlabel('z')
title('Plano')
hold off
view(120,30)
El punto P (4,3,-2) no está en el plano, sin embargo, si lo está el punto Q(2,2,2).
Seleccionado en el menú Tools/Data Cursor o el icono, marcado en color rojo
![]()
Con el puntero del ratón señalamos un punto en el gráfico tridimensional y se nos proporcionan las coordenadas de dicho punto, tal como vemos en la figura.
El punto P (4,3,-2) no está en el plano por que el rango de la matriz de los coeficientes que es dos
por ser y dos vectores linealmente independientes no es igual al rango de la matriz ampliada
>> A=[1,-1;-1,2;2,1]; >> b=[2;2;-3]; >> rank(A) ans = 2 >> Ab=[A b]; >> rank(Ab) ans = 3 >> det(Ab) ans = -19
En el caso del punto Q (2,2,2)
>> A=[1,-1;-1,2;2,1]; >> b=[0;1;3]; >> rank(A) ans = 2 >> Ab=[A b]; >> rank(Ab) ans = 2 >> det(Ab) ans = -1.1102e-015
En general, un punto P(x,y,z) pertenecerá al plano, si el determinante de la matriz ampliada es cero. Obtenemos la ecuación del plano, ax+by+cz+d=0
Hallar la ecuación del plano que pasa por los puntos A(2,1,0), B(1,1,3) y C(0,0,2).
A es el punto de coordenadas (x0,y0,z0), el vector tiene origen en A y extremo en B, el vector tiene origen en A y extremo en C.
x0=2, y0=1; z0=0, ux=1-2, uy=1-1,uz=3-0, vx=0-2, vy=0-1,vz=2-0.
>> syms x y z; >> A=[-1,-2;0,-1;3,2]; >> b=[x-2;y-1;z]; >> Ab=[A b]; >> det(Ab) ans =3*x - 4*y + z - 2
La ecuación del plano es 3x-4y+z-2=0
>> syms t s;
>> ezmesh('2-t-2*s','1-s','3*t+2*s',[-0.5,1.5,-0.5,1.5])
>> view(120,30)
Incidencia y paralelismo
Sean dos planos. Formemos la matriz A y la matriz ampliada Ab
Planos coincidentes
Dos planos coinciden si el rango de la matriz A y de la matriz Ab valen la unidad
Sean los planos: x-2y+z=1 y -3x+6y-3z=-3
>> A=[1,-2,1;-3,6,-3]; >> b=[1;-3]; >> Ab=[A b]; >> rank(A) ans = 1 >> rank(Ab) ans = 1
El segundo plano se obtiene multiplicando el primero por -3, por lo que coinciden
Planos paralelos
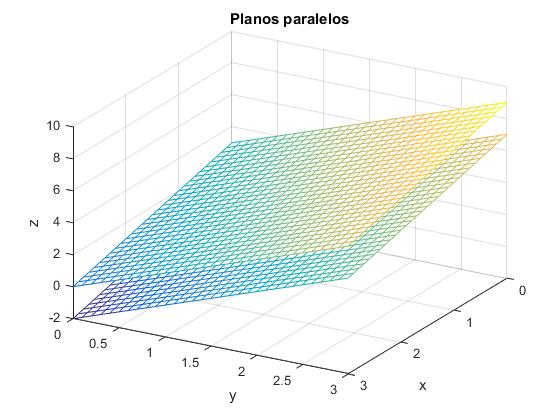
Dos planos son paralelos si el rango de la matriz A es uno pero no son coincidentes es decir, el rango de la matriz Ab es dos. Sean los planos: x-2y+z=1 y -2x+4y-2z=6
>> A=[1,-2,1;-2,4,-2]; >> b=[1;6]; >> Ab=[A b]; >> rank(A) ans = 1 >> rank(Ab) ans = 2
Representamos los planos
[x,y] = meshgrid(0:0.1:3);
z = 1-x+2*y;
hold on
mesh(x,y,z)
z = 3-x+2*y;
mesh(x,y,z)
xlabel('x')
ylabel('y')
zlabel('z')
title('Planos paralelos')
grid on
hold off
view(120,30)
Utilizamos la función
>> hold on
>> ezmesh('1-x+2*y',[-1,2,-1,2])
>> ezmesh('3-x+2*y',[-1,2,-1,2])
>> view(120,30)
>> hold off
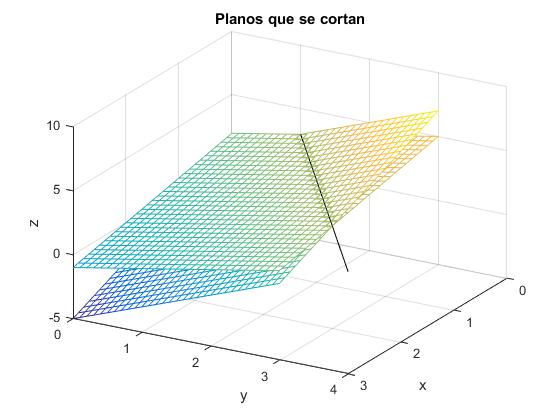
Planos que se cortan
Sean los planos: x-y+z=2 y 2x-2y+z=1
Para determinar la recta intersección de los dos planos eliminamos z entre las dos ecuaciones, se obtiene y=x+1.
Eliminamos y entre las dos ecuaciones, se obtiene z=3
Se representan los planos y la recta intersección
%dos planos
[x,y] = meshgrid(0:0.1:3);
z = 2-x+y;
hold on
mesh(x,y,z)
z = 1-2*x+2*y;
mesh(x,y,z)
%recta intersección
x=[0,3];
y=x+1;
line(x,y,[3,3], 'color','k')
xlabel('x')
ylabel('y')
zlabel('z')
title('Planos que se cortan')
grid on
hold off
view(120,30)
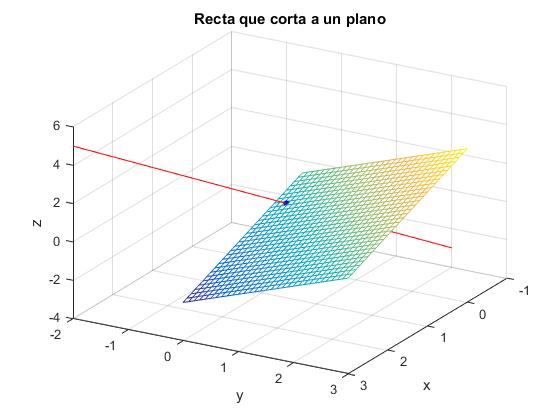
Recta y plano
Sea la recta
donde el rango de la mariz A es dos.
y el plano,
La recta y el plano se denominan incidentes si tienen un punto P en común, se tiene que cumplir que
Sea la recta y el plano
>> A=[1 1,0;2,0,-1]; %recta
>> rank(A)
ans = 2
>> B=[A;[1,-1,1]]; %recta y plano
>> det(B)
ans = -4
>> b=[1;1;1];
>> X=B\b
X =
0.7500
0.2500
0.5000
Representamos la recta y el plano
%plano
[x,y] = meshgrid(0:0.1:3);
z = 1-x+y;
hold on
mesh(x,y,z)
%recta
mesh(x,y,z)
x=[-1,3];
y=1-x;
z=2*x-1;
line(x,y,z,'color','r')
%punto de intersección
B=[1,1,0;2,0,-1;1,-1,1];
b=[1;1;1];
X=B\b
plot3(X(1),X(2),X(3),'bo','markersize',4,'markerfacecolor','b');
xlabel('x')
ylabel('y')
zlabel('z')
title('Recta que corta a un plano')
grid on
hold off
view(120,30)
Si la recta y el plano no son incidentes se denominan paralelos y pueden ocurrir los siguientes casos:
Sea la matriz B
- Que la recta esté contenida en el plano
- Que la recta no tenga puntos en común con el plano
El rango de la matriz B será dos
El rango de la matriz B será tres. El determinante
Sea la recta y el plano
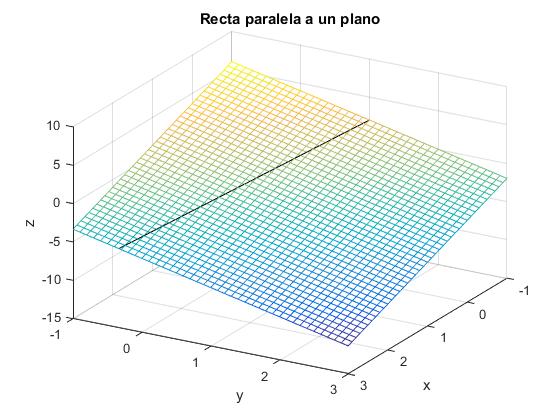
Determinar el valor de a para que el plano sea paralelo a la recta.
>> syms a; >> C=[2,1,1;1,-2,1;a,6,3]; >> solve(det(C),a) ans =7
Comprobar que cuando el valor de b=5 el plano contiene a la recta.
El rango de la matriz B tiene que ser dos.
>> B=[2,1,1,1;1,-2,1,-1;7,6,3,5]; >> rank(B) ans = 2
%plano
[x,y] = meshgrid(-1:0.1:3);
z=(5-7*x-6*y)/3;
mesh(x,y,z)
%recta
mesh(x,y,z)
x=[-1,3];
y=(2-x)/3;
z =(1-5*x)/3;
line(x,y,z,'color','k')
xlabel('x')
ylabel('y')
zlabel('z')
title('Recta paralela a un plano')
grid on
view(120,30)
Posiciones relativas de dos rectas
Sean dos rectas r1 y r2. Formamos la matriz A de los coeficientes y la matriz Ab ampliada.
Se pueden producir las situaciones siguientes:
| rango Ab\rango A | 2 | 3 |
|---|---|---|
| 2 | Coincidentes | Imposible |
| 3 | Paralelas. No coincidentes | Secantes |
| 4 | Imposible | Se cruzan |
Las rectas se cruzan
Sean las rectas r1 y r2.
Calculamos el rango de la matriz A y de la matriz ampliada Ab
>> A=[1,1,1;2,-1,1;2,1,1;1,1,2]; >> b=[1;2;1;2]; >> Ab=[A b]; >> rank(A) ans = 3 >> rank(Ab) ans = 4
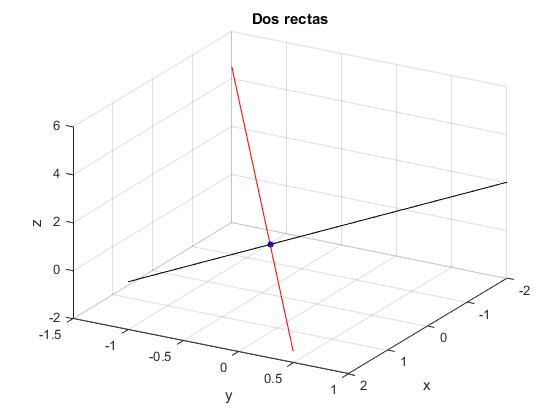
Rectas secantes
>> A=[1,1,1;2,-1,1;1,1,1;1,0,2]; >> b=[1;2;1;2]; >> Ab=[A b]; >> rank(A) ans = 3 >> rank(Ab) ans = 3
Vemos que la tercera ecuación es idéntica a la primera. Construimos la matriz de los coeficientes de las ecuaciones primera, segunda y cuarta, y el vector de los términos independientes de estas tres ecuaciones. Obtenemos el punto de intersección mediante el operador división por la izquierda.
>> A=[1,1,1;2,-1,1;1,0,2];
>> b=[1;2;2];
>> X=A\b
X =
0.5000
-0.2500
0.7500
Representamos las rectas
x=[-2,2];
%primera recta
y=(x-1)/2;
z=3*(1-x)/2;
hold on
line(x,y,z,'color','r')
%segunda recta
y=-x/2;
z=(2-x)/2;
line(x,y,z,'color','k')
%Punto de intersección
A=[1,1,1;2,-1,1;1,0,2];
b=[1;2;2];
X=A\b
plot3(X(1),X(2),X(3),'bo','markersize',4,'markerfacecolor','b');
grid on
xlabel('x')
ylabel('y')
zlabel('z')
title('Dos rectas')
hold off
view(120,30)
Rectas paralelas
>> A=[1,1,1;2,-1,1;1,1,1;1,4,2]; >> b=[1;2;1;2]; >> Ab=[A b]; >> rank(A) ans = 2 >> rank(Ab) ans = 3
x=[-2,2];
%primera recta
y=(x-1)/2;
z=3*(1-x)/2;
line(x,y,z,'color','r')
%segunda recta
y=x/2;
z=(2-3*x)/2;
line(x,y,z,'color','b')
grid on
xlabel('x')
ylabel('y')
zlabel('z')
title('Dos rectas')
view(120,30)