

Dos partículas deslizan a lo largo de una pista circular que gira
En la figura, se muestra un sistema formado por dos partículas de masa m unidas por un muelle elástico de constante k que pueden deslizar a lo largo de un aro de radio R cuyo eje horizontal de giro Z pasa por un diámetro.
La velocidad angular de rotación ω es constante.
En la página titulada Vibración de una molécula diatómica. El potencial de Lennard-Jones, calculamos la frecuencia angular de vibración de dos partículas de masas m1 y m2 unidas por un muelle elástico de constante k
Donde μ=m/2 es la masa reducida
Como el eje de giro Z es horizontal, el centro de masa de las dos partículas está en dicho eje por tanto, no hay cambio en la energía potencial gravitatoria. La energía potencial se debe únicamente a la deformación del muelle elástico
2r0 (r0<R) es la longitud del muelle sin deformar. La energía cinética es
Siendo r la distancia de la partícula al eje de rotación Z y z es la distancia al origen de la recta que une a las dos partículas. La expresión anterior es la energía cinética de una partícula en coordenadas cilíndricas, con ρ=r y dφ/dt=ω
Como las partículas deslizan a lo largo del aro, r y z están relacionados
La energía cinética se expresa en términos de la variable z
La lagrangiana L=Ek-Ep es
Hemos definido una masa y un potencial efectivos
El potencial efectivo es la suma de la energía potencial del muelle deformado y del potencial centrífugo
Posiciones de equilibrio
Las posiciones de equilibrio se determinan igualando la derivada primera respecto de z del potencial efectivo a cero.
Existen tres posiciones de equilibrio. La primera es z=0, y las otras dos
dVe/dz=0, tiene tres raíces reales si ξ<R y una raíz real z=0, si ξ>R.
Se denomina velocidad angular crítica ωc a aquella que hace que ξ=R
Hemos definido el parámetro adimensional ε=r0/R
Si ω<ωc, entonces ξ<R, hay tres raíces reales, y si ω>ωc entonces ξ>R, solamente hay una raíz real z=0.
Para determinar si la posición de equilibrio es estable o inestable, evaluamos la derivada segunda
| ω o ξ | Posición | Signo de la derivada segunda | Equilibrio |
|---|---|---|---|
ω>ωc | z=0 | Estable | |
ω<ωc | z=0 | Inestable | |
ω<ωc | Estable | ||
ω=ωc | z=0 | Indiferente | |
| ω=0 ξ=r0 | Estable |
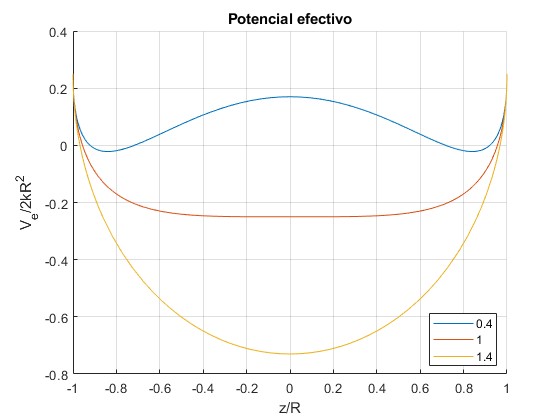
Representamos el potencial efectivo Ve(z), en términos de magnitudes adimensionales, x=z/R, ω/ωc y ε=r0/R
ex=0.5; %cociente r0/R
hold on
for W=[0.4,1,1.4]
f=@(x) (sqrt(1-x.^2)-ex).^2-(1-ex)*W^2*(1-x.^2); %x=z/R, W=w/w_c
fplot(f,[-1,1],'displayName',num2str(W))
end
hold off
grid on
legend('-DynamicLegend','location','best')
xlabel('z/R')
ylabel('V_e/2kR^2')
title('Potencial efectivo')
Teniendo en cuenta
La posición de equilibrio estable xe para ω<ωc se expresa en términos de dichas magnitudes adimensionales
Para ε=0.5 y para ω/ωc=0.4, la posición de equilibrio estable (mínimo) es xe=±0.8394. Véase la sección 'Ecuación del movimiento'
Oscilaciones de pequeña amplitud
Alrededor de las posiciones de equilibrio estable las partículas oscilan. Si la amplitud es pequeña, las oscilaciones son aproximadamente armónicas. La constante efectiva del muelle es el valor de la derivada segunda del potencial efectivo evaluada en la posición de equilibrio estable ze
Desarrollamos en serie Ve(z) alrededor de la posición de equilibrio ze
Hay tres posibles posiciones de equilibrio estable ze=0, y , de las cuales consideramos dos, al ser una simétrica de la otra
Para ω>ωc, ze=0, es la posición de equilibrio estable
La derivada segunda del potencial efectivo en la posición de equilibrio vale
La energía potencial Ve(z) efectiva en las proximidades de ze=0 se puede aproximar y expresar en términos de magnitudes adimensionales ω/ωc y ε=r0/R
Representamos la energía potencial efectiva exacta y aproximada tomando el término constante y el primer término del desarrollo en serie, para ε=0.5 y para ω/ωc=1.4
ex=0.5; %cociente r0/R
hold on
W=1.4; %w/w_c
f=@(x) (sqrt(1-x.^2)-ex).^2-(1-ex)*W^2*(1-x.^2); %exacto
xe=0; %equilibrio
Z=1-(1-ex)*W^2;
g=@(x) (1-ex)^2-(1-Z)+(ex-Z)*x.^2; %aproximado
fplot(f,[xe-0.1,xe+0.1])
fplot(g,[xe-0.1,xe+0.1])
hold off
grid on
xlabel('x')
legend('potencial','aproximación','location','best')
ylabel('V_e(x)')
title('Potencial efectivo y aproximación')
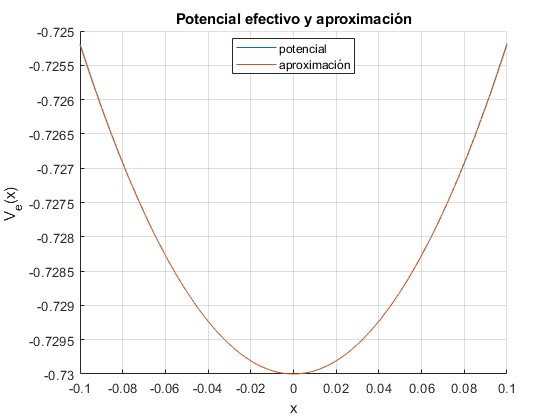
Apenas se distingue entre el potencial efectivo exacto y el aproximado en las proximidades de ze=0. Las oscilaciones de las dos partículas unidas al muelle elástico son casi armónicas
La masa efectiva es, μ=2m
La frecuencia angular de las oscilaciones es
Se puede expresar ω> en términos de magnitudes adimensionales ω/ωc y ε=r0/R
Para ω<ωc, la posición de equilibrio estable es , la otra es simétrica
La derivada segunda del potencial efectivo en la posición de equilibrio vale
La energía potencial Ve(z) efectiva en las proximidades de ze se puede aproximar y expresar en términos de magnitudes adimensionales ω/ωc y ε=r0/R
Representamos la energía potencial exacta y aproximada tomando el término constante y el primer término del desarrollo en serie, para ε=0.5 y para ω/ωc=1.4
ex=0.5; %cociente r0/R
hold on
W=0.4; %w/W-c
f=@(x) (sqrt(1-x.^2)-ex).^2-(1-ex)*W^2*(1-x.^2); %exacto
xe=sqrt(1-ex^2/(1-(1-ex)*W^2)^2); %equilibrio
%aproximado
Z=1-(1-ex)*W^2;
g=@(x) ex^2*(1/Z-1)^2-(1-Z)*ex^2/Z^2+Z*(Z^2/ex^2-1)*(x-sqrt(1-ex^2/Z^2)).^2;
fplot(f,[xe-0.1,xe+0.1])
fplot(g,[xe-0.1,xe+0.1])
line([xe,xe],[0,f(xe)],'lineStyle','--')
hold off
grid on
xlabel('x')
legend('potencial','aproximación','location','best')
ylabel('V_e(x)')
title('Potencial efectivo y aproximación')
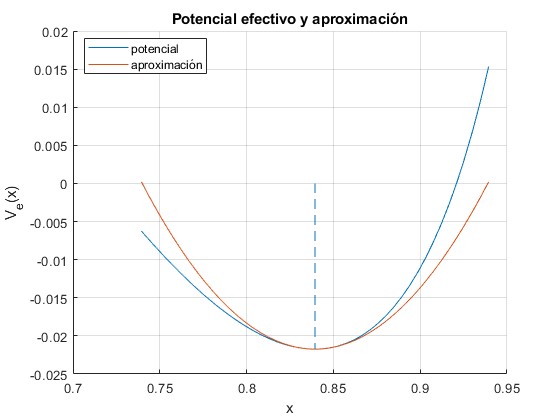
Se aprecian diferencias entre el potencial efectivo exacto y el aproximado en las proximidades de . Las oscilaciones de las dos partículas unidas al muelle elástico no son armónicas
La masa efectiva es
La frecuencia angular de las oscilaciones es
Se puede expresar ω> en términos de magnitudes adimensionales ω/ωc y ε=r0/R
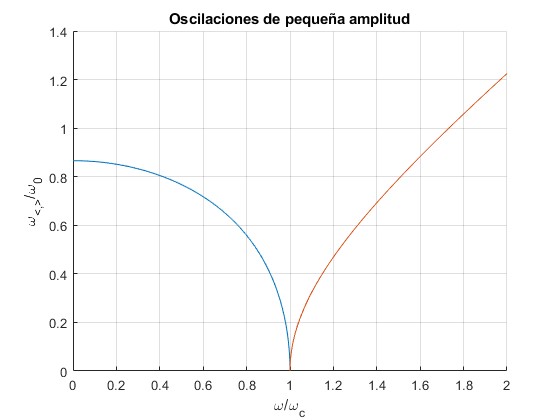
Representamos ω</ω0 y ω>/ω0 en función de ω/ωc para ε=0.5. Cuando ω→ωc, el equilibrio es indiferente, no hay oscilaciones, ω=0.
ex=0.5; %cociente r0/R
hold on
f=@(x) sqrt((1-ex)*(x.^2-1)); %w>w_c
g=@(x) sqrt((1-ex)*(1+ex+(1-ex)*x.^4-2*x.^2)./(1-(1-ex)*x.^2)); %w<w_c
fplot(g,[0,1])
fplot(f,[1,2])
hold off
grid on
xlabel('\omega/\omega_c')
ylabel('\omega_{<,>}/\omega_0')
title('Oscilaciones de pequeña amplitud')
Ecuación del movimiento
Hemos calculado la lagrangiana L=Ek-Ep que depende de z y dz/dt, la ecuación del movimiento es
Para resolver numéricamente, es mejor expresar la ecuación diferencial en términos de variables adimensionales, x=z/R, τ=ω0t/(2π), ω/ωc y ε
donde -1≤x≤1
Para resolver la ecuación diferencial consideramos los dos casos ω>ωc y ω<ωc separadamente
ω>ωc
Sea ε=0.5 y ω/ωc=1.4
Representamos el potencial efectivo Ve(x), tiene un mínimo (punto de color rojo) en xe=ze/R=0, cuyo valor es Ve(0)=-0.73. El valor en el extremo del intervalo x=1 es Ve(1)=0.25
Tomamos un valor de la energía, por ejemplo, e=-0.4 comprendido entre el mínimo y Ve(1). Los puntos de retorno, aquellos en los que la velocidad es cero, Ve(x)=e, se obtienen resolviendo la ecuación trascendente utilizando la función
El resultado es, x0=0.7524
ex=0.5; %cociente r0/R
hold on
W=1.4; %cociente w/w_c
f=@(x) (sqrt(1-x.^2)-ex).^2-(1-ex)*W^2*(1-x.^2); %x=z/R,
fplot(f,[-1,1])
plot(0,f(0),'ro','markersize',4,'markerfacecolor','r') %mínimo
e=-0.4; %energía
g=@(x) f(x)-e;
x0=fzero(g,[0,1]); %retorno
line([-x0,x0],[e,e])
line([x0,x0],[0,e], 'lineStyle','--')
plot(x0,0,'bo','markersize',3,'markerfacecolor','b') %retorno
hold off
grid on
xlabel('x')
ylabel('V_e(x)')
title('Potencial efectivo')
Supongamos que la partícula parte de la posición x0 con velocidad nula. Resolvemos la ecuación del movimiento utilizando el procedimiento
ex=0.5; %cociente r0/R
W=1.4; %cociente w/w_c
e=-0.4; %energía
g=@(x) (sqrt(1-x^2)-ex)^2-(1-ex)*W^2*(1-x^2)-e;
x0=fzero(g,[0,1]); %retorno
f=@(t,x) [x(2); -x(1)*x(2)^2/(1-x(1)^2)-4*pi^2*((1-ex)*W^2-1)*x(1)*
(1-x(1)^2)-4*pi^2*ex*x(1)*sqrt(1-x(1)^2)];
[t,x]=ode45(f,[0,5],[x0,0]);
plot(t,x(:,1)) % tiempo, posición
grid on
xlabel('t')
ylabel('x')
title('Movimiento')
La energía potencial efectiva Ve(x) es simétrica por lo que la partícula oscila entre x0 y -x0 tal como vemos en la figura
Representamos las trayectorias en el espacio de las fases, en el eje horizontal x, en el eje vertical la velocidad dx/dτ, para diversos valores de la energía
Como la energía potencial efectiva es simétrica, basta resolver la ecuación difrencial desde x0 a x=0
function pista_8
ex=0.5; %cociente r0/R
W=1.4; %cociente w/w_c
hold on
%equilibrio x=0
for e=-0.6:0.2:0.1
g=@(x) (sqrt(1-x^2)-ex)^2-(1-ex)*W^2*(1-x^2)-e;
x0=fzero(g,[0,1]); %retorno
f=@(t,x) [x(2); -x(1)*x(2)^2/(1-x(1)^2)-4*pi^2*((1-ex)*W^2-1)*
x(1)*(1-x(1)^2)-4*pi^2*ex*x(1)*sqrt(1-x(1)^2)];
opts=odeset('events',@stop_pista);
[~,x]=ode45(f,[0,10],[x0,0], opts);
xx=x(:,1);
yy=x(:,2);
plot([-fliplr(xx),xx],[yy,yy],'r') % posición, velocidad
plot([-fliplr(xx),xx],[-yy,-yy],'r')
end
hold off
grid on
xlabel('x')
ylabel('dx/d\tau')
title('Espacio de las fases')
function [value,isterminal,direction]=stop_pista(~,x)
value=x(1);
isterminal=1;
direction=-1;
end
end
ω<ωc
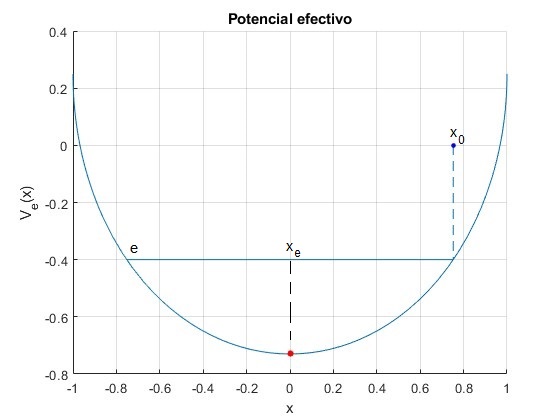
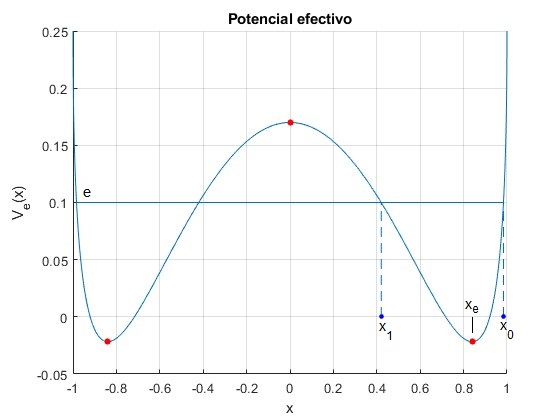
Sea ε=0.5 y ω/ωc=0.4
Representamos el potencial efectivo Ve(x), tiene un mínimo (punto de color rojo) en xe=ze/R=0.8394, cuyo valor es Ve(xe)=-0.0217 y un máximo en x=0, cuyo valor es Ve(0)=0.1700. El valor en el extremo del intervalo x=1 es Ve(1)=0.25
Se presentan dos posibles casos:
Energía, Ve(xe)<e<Ve(0)
Tomamos un valor de la energía comprendido entre el mínimo y el máximo, por ejemplo, e=0.1. Los puntos de retorno, aquellos en los que la velocidad es cero, Ve(x)=e, se obtienen resolviendo la ecuación trascendente utilizando la función
El punto de retorno comprendido entre xe y x=1 es x0=0.9837 y el comprendido entre x=0 y xe es x1=0.4206
ex=0.5; %cociente r0/R
hold on
W=0.4;%w/w_c
f=@(x) (sqrt(1-x.^2)-ex).^2-(1-ex)*W^2*(1-x.^2); %x=z/R
fplot(f,[-1,1])
xe=sqrt((1-ex)*(1+ex+(1-ex)*W^4-2*W^2))/(1-(1-ex)*W^2); %equilibrio
plot(xe,f(xe),'ro','markersize',4,'markerfacecolor','r') %mínimo
plot(-xe,f(xe),'ro','markersize',4,'markerfacecolor','r') %mínimo
plot(0,f(0),'ro','markersize',4,'markerfacecolor','r') %máximo
e=0.1; %energía
g=@(x) f(x)-e;
x0=fzero(g,[xe,1]);
x1=fzero(g,[0,xe]);
line([-x0,x0],[e,e])
line([x0,x0],[0,e], 'lineStyle','--')
line([x1,x1],[0,e], 'lineStyle','--')
plot(x0,0,'bo','markersize',3,'markerfacecolor','b') %retorno
plot(x1,0,'bo','markersize',3,'markerfacecolor','b') %retorno
hold off
grid on
xlabel('x')
ylabel('V_e(x)')
title('Potencial efectivo'
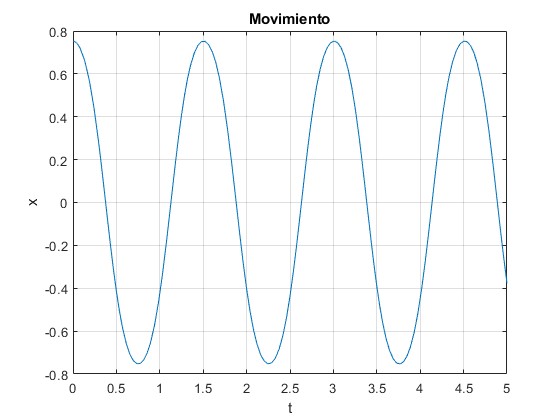
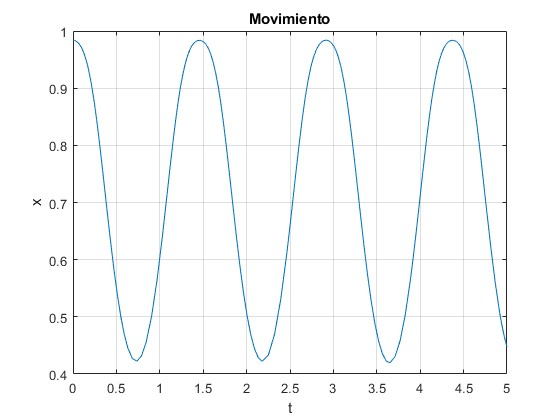
Supongamos que la partícula parte de la posición x0 con velocidad nula. Resolvemos la ecuación del movimiento utilizando el procedimiento
ex=0.5; %cociente r0/R
W=0.4; %cociente w/w_c
e=0.1; %energía
g=@(x) (sqrt(1-x^2)-ex)^2-(1-ex)*W^2*(1-x^2)-e;
xe=sqrt((1-ex)*(1+ex+(1-ex)*W^4-2*W^2))/(1-(1-ex)*W^2); %equilibrio
x0=fzero(g,[xe,1]); %retorno
f=@(t,x) [x(2); -x(1)*x(2)^2/(1-x(1)^2)-4*pi^2*((1-ex)*W^2-1)*x(1)*
(1-x(1)^2)-4*pi^2*ex*x(1)*sqrt(1-x(1)^2)];
[t,x]=ode45(f,[0,5],[x0,0]);
plot(t,x(:,1)) % tiempo, posición
grid on
xlabel('t')
ylabel('x')
title('Movimiento')
La partícula oscila entre x0 y x1
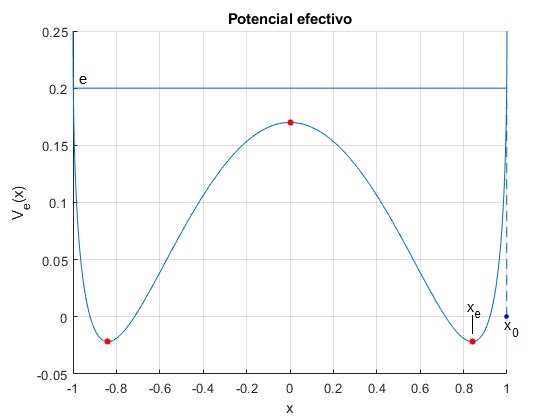
Energía, Ve(0)<e<Ve(1)
Tomamos un valor de la energía comprendido entre el máximo Ve(0)=0.17 y Ve(1)=0.25, por ejemplo, e=0.2. Los puntos de retorno, aquellos en los que la velocidad es cero, Ve(x)=e, se obtienen resolviendo la ecuación trascendente utilizando la función
El punto de retorno está comprendido entre xe y x=1 es x0=0.9986
ex=0.5; %cociente r0/R
hold on
W=0.4;%w/w_c
f=@(x) (sqrt(1-x.^2)-ex).^2-(1-ex)*W^2*(1-x.^2); %x=z/R
fplot(f,[-1,1])
xe=sqrt((1-ex)*(1+ex+(1-ex)*W^4-2*W^2))/(1-(1-ex)*W^2); %equilibrio
plot(xe,f(xe),'ro','markersize',4,'markerfacecolor','r') %mínimo
plot(-xe,f(xe),'ro','markersize',4,'markerfacecolor','r') %mínimo
plot(0,f(0),'ro','markersize',4,'markerfacecolor','r') %máximo
e=0.2; %energía
g=@(x) f(x)-e;
x0=fzero(g,[xe,1]); %retorno
line([-x0,x0],[e,e])
line([x0,x0],[0,e], 'lineStyle','--')
plot(x0,0,'bo','markersize',3,'markerfacecolor','b') %retorno
hold off
grid on
xlabel('x')
ylabel('V_e(x)')
title('Potencial efectivo')
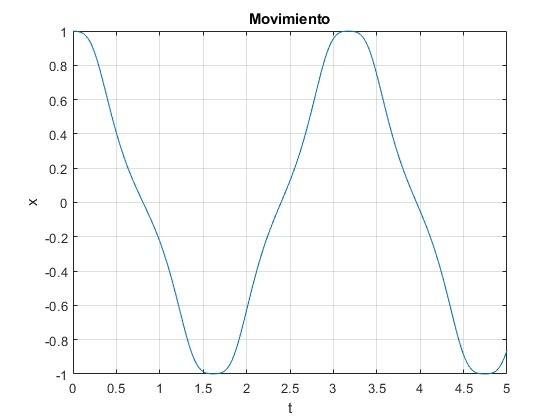
Supongamos que la partícula parte de la posición x0 con velocidad nula. Resolvemos la ecuación del movimiento utilizando el procedimiento
ex=0.5; %cociente r0/R
W=0.4; %cociente w/w_c
e=0.2; %energía
g=@(x) (sqrt(1-x^2)-ex)^2-(1-ex)*W^2*(1-x^2)-e;
xe=sqrt((1-ex)*(1+ex+(1-ex)*W^4-2*W^2))/(1-(1-ex)*W^2); %equilibrio
x0=fzero(g,[xe,1]); %retorno
f=@(t,x) [x(2); -x(1)*x(2)^2/(1-x(1)^2)-4*pi^2*((1-ex)*W^2-1)*
x(1)*(1-x(1)^2)
-4*pi^2*ex*x(1)*sqrt(1-x(1)^2)];
[t,x]=ode45(f,[0,5],[x0,0]);
plot(t,x(:,1)) % tiempo, posición
grid on
xlabel('t')
ylabel('x')
title('Movimiento')
La energía potencial efectiva Ve(x) es simétrica por lo que la partícula oscila entre x0 y -x0 tal como vemos en la figura
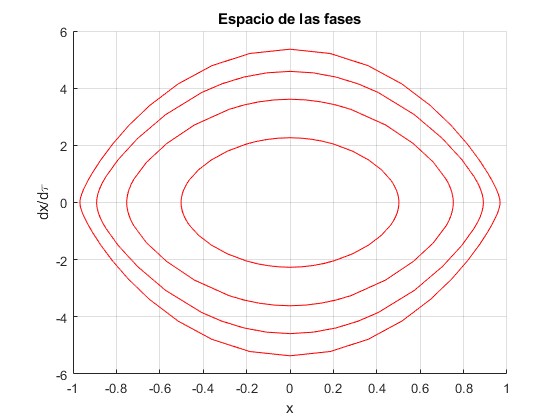
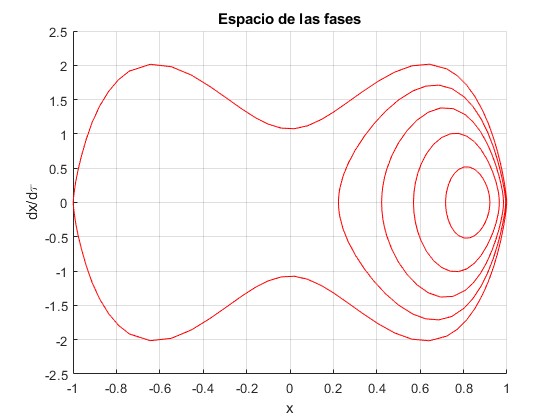
Representamos las trayectorias en el espacio de las fases, en el eje horizontal x, en el eje vertical la velocidad dx/dτ, para diversos valores de la energía
Como la energía potencial efectiva no es simétrica,resolvemos la ecuación diferencial desde x0 a -x0 donde la velocidad dx/dτ vuelve a ser cero
function pista_9
ex=0.5; %cociente r0/R
W=0.4; %cociente w/w_c
hold on
for e=0:0.05:0.2
g=@(x) (sqrt(1-x^2)-ex)^2-(1-ex)*W^2*(1-x^2)-e;
ze=sqrt((1-ex)*(1+ex+(1-ex)*W^4-2*W^2))/(1-(1-ex)*W^2);
x0=fzero(g,[ze,1]); %retorno
f=@(t,x) [x(2); -x(1)*x(2)^2/(1-x(1)^2)-4*pi^2*((1-ex)*W^2-1)*x(1)
*(1-x(1)^2)-4*pi^2*ex*x(1)*sqrt(1-x(1)^2)];
opts=odeset('events',@stop_pista);
[~,x]=ode45(f,[0,10],[x0,0], opts);
xx=x(:,1);
yy=x(:,2);
plot(xx,yy,'r') % posición, velocidad
plot(xx,-yy,'r')
end
hold off
grid on
xlabel('z/R')
ylabel('v')
title('Espacio de las fases')
function [value,isterminal,direction]=stop_pista(~,x)
value=x(2);
isterminal=1;
direction=0;
end
end
Referencias
Fredy Ochoa, Jorge Clavijo. Bead, hoop and spring as a classical spontaneous symmetry breaking problem. Eur. J. Phys. 27 (2006) pp. 1277–1288
O.L. de Lange, J. Pierrus. Solved Problems in Classical Mechanics. Analytical and numerical solutions with comments. Oxford University Press. Secciones 10.14, 10.15, 13.16