

Movimiento de una partícula sobre una plataforma en rotación
El caso más simple, se da cuando la partícula está en reposo sobre la plataforma
Cuando una partícula está en reposo sobre la plataforma en movimiento de rotación con velocidad angular constante Ω, la fuerza de rozamiento varía de 0 a su máximo valor μs·N=μs·mg, dependiendo de la distancia r de la partícula al origen.
Si una partícula describe una trayectoria circular de radio r, la fuerza de rozamiento que ejerce la plataforma sobre la partícula Fs, se obtiene aplicando la ecuación de la dinámica del movimiento circular uniforme
Sea R el radio para el cual la fuerza de rozamiento Fs adquiere su valor máximo μs·N=μs·mg. μs es el coeficiente estático
R es la máxima distancia radial a la que puede estar la partícula sobre la plataforma en rotación, más allá de la cual no puede seguir en reposo. En otras palabras
- Si la partícula está en reposo dentro de la circunferencia de radio r<R, contuará en reposo
- Cuando se sitúa fuera de la circunferencia, r>R continúa deslizando hacia afuera
- Cuando se sitúa en la circunferencia, r=R estará en equilibrio inestable, cualquier perturbación le hará deslizar hacia fuera
Sistema de Referencia no inercial
El eje Z coincide con el eje de la plataforma
Las fuerzas sobre la partícula serán
La fuerza de rozamiento, de sentido contrario a la velocidad de la partícula
μk es el coeficiente cinético
La ecuación del movimiento es
La posición, velocidad y aceleración de una partícula respecto de un observador situado en el centro de la plataforma
Tenemos que resolver el sistema de dos ecuaciones diferenciales
Caso particular, cuando no hay rozamiento
Utilizamos la notación compleja
Las raíces de la ecuación característica son
La solución de esta ecuación diferencial lineal con raíces repetidas es
Donde C y D son números complejos cuya parte real e imaginaria se determinan a partir de las condiciones iniciales:
El caso más simple es el de una partícula que parte del origen con velocidad v0x
El resultado es
La posición de la partícula (x, y) en función del tiempo t es
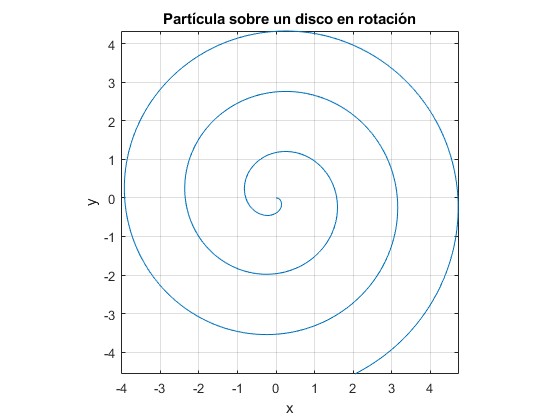
Representamos la trayectoria de la partícula que desliza sin rozamiento sobre disco que gira alrededor de su eje vertical con velocidad angular constante Ω= 1 rad/s. La partícula parte del origen con velocidad v0x=0.25 m/s
w=1; %velocidad angular de rotación
v0=0.25; %velocidad inicial en X
fplot(@(t) v0*t.*cos(w*t), @(t) -v0*t.*sin(w*t), [0,20])
grid on
axis equal
xlabel('x')
ylabel('y');
title('Partícula sobre un disco en rotación')
Coordenadas polares
Es conveniente expresar las ecuaciones del movimiento en coordenadas polares. La posición, velocidad y aceleración son
La ecuación del movimiento es
Expresamos la ecuación del movimiento en términos de dos variables adimensionales τ y ξ
La circunferencia crítica tiene un radio de ξ=1
Se resuelve el sistema de dos ecuaciones diferenciales por procedimientos numéricos
Examinamos los casos en los que la partícula parte de un punto dentro de la circunferencia crítica ξ<1 con velocidad no nula. A continuación, los casos en los que la partícula parte de puntos situados fuera de la circunferencia de radio unidad
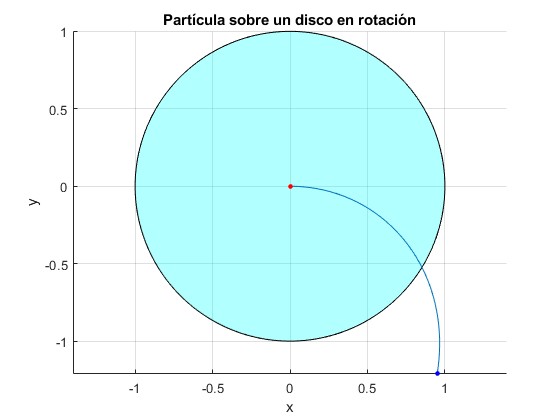
La partícula parte del origen, ξ=0, θ=0, con velocidad dξ/dτ=2, dθ/dτ=0. Observamos la trayectoria durante un tiempo τ=1
function disco
ang=(0:360)*pi/180; %disco
hold on
fill(cos(ang),sin(ang),'c','FaceAlpha',.3)
opts=odeset('events',@stop_particula);
% x(1) es r, x(2) dr/dt, x(3) es th, x(4) dth/dt
fg=@(t,x)[x(2); x(1)*x(4)^2+x(1)+2*x(1)*x(4)-x(2)/sqrt(x(2)^2+
x(1)^2*x(4)^2); x(4); -2*x(2)*x(4)/x(1)-2*x(2)/x(1)-x(4)/sqrt(x(2)^2+
x(1)^2*x(4)^2)];
[t,x]=ode45(fg,[0,1],[eps, 2, 0, 0], opts);
xx=x(:,1).*cos(x(:,3));
yy=x(:,1).*sin(x(:,3));
plot(xx,yy)
plot(xx(1),yy(1),'ro','markersize',3,'markerfacecolor','r')
plot(xx(end),yy(end),'bo','markersize',3,'markerfacecolor','b')
hold off
axis equal
disp(t(end))
grid on
xlabel('x')
ylabel('y');
title('Partícula sobre un disco en rotación')
function [value,isterminal,direction]=stop_particula(~,x)
v2=10;
if x(2)^2+x(1)^2*x(4)^2<1e-6 %detiene
v2=0;
end
value=v2;
isterminal=1;
direction=-1;
end
end
La partícula parte del origen, ξ=0, θ=0, con velocidad dξ/dτ=1.15, dθ/dτ=0. Observamos la trayectoria hasta que se detiene en el instante τ=2.75
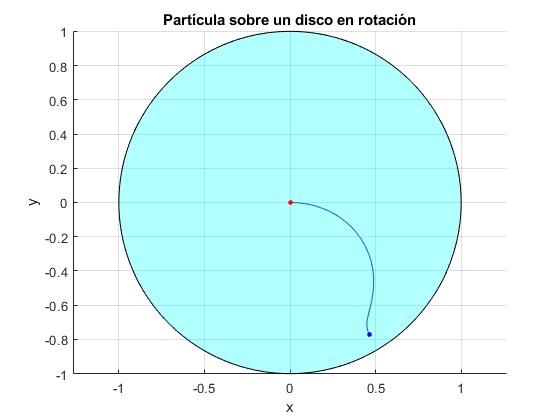
2.7454
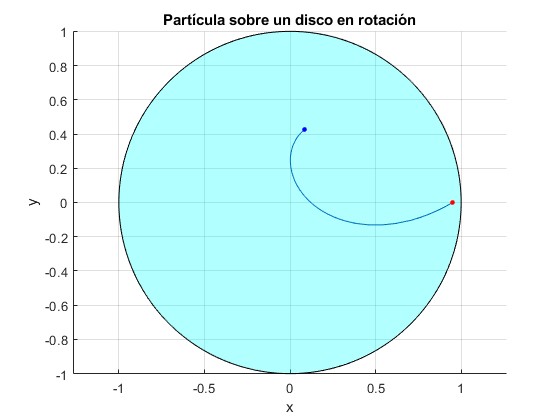
La partícula parte de la posición, ξ=0.95 (en el interior de la circunferencia, cerca del borde), θ=0, con velocidad dξ/dτ=-1.6, dθ/dτ=-1. Observamos la trayectoria hasta que se detiene en el instante τ=1.86
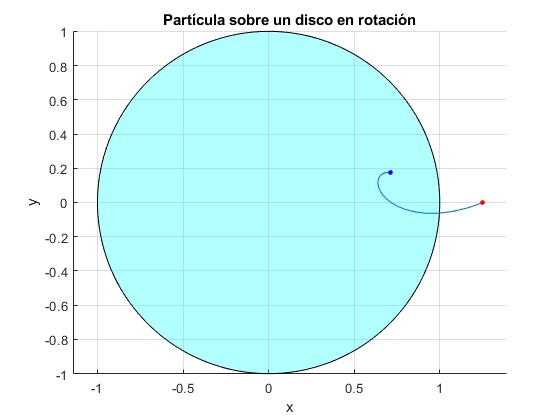
La partícula parte de la posición, ξ=1.25 (fuera de la circunferencia), θ=0, con velocidad dξ/dτ=-1.5, dθ/dτ=-0.5. Observamos la trayectoria hasta que se detiene dentro de la circunferencia en el instante τ=1.62
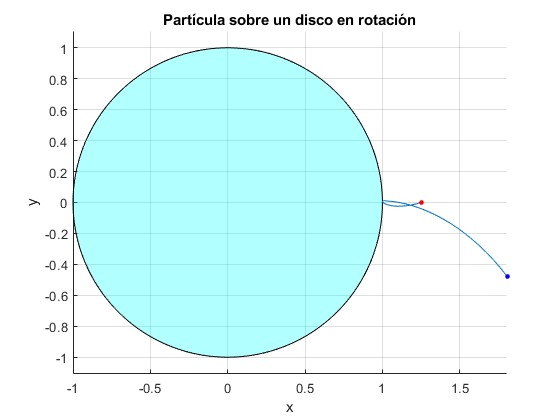
La partícula parte de la posición, ξ=1.25 (fuera de la circunferencia), θ=0, con velocidad dξ/dτ=-2, dθ/dτ=-1. La partícula sale fuera del disco, observamos la trayectoria durante τ=3
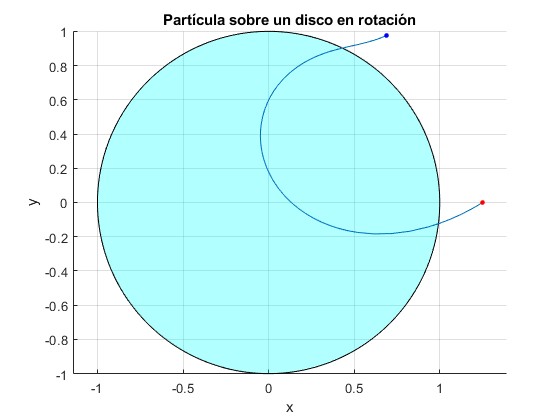
La partícula parte de la posición, ξ=1.25 (fuera de la circunferencia), θ=0, con velocidad dξ/dτ=-1, dθ/dτ=-0.25. Se acerca a la circunferencia y luego, se aleja deslizando sobre el disco. Observamos la trayectoria durante τ=5
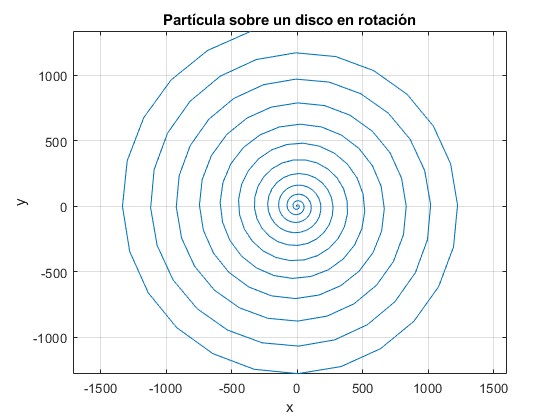
Observamos la trayectoria de la partícula deslizando en un disco de radio muy grande
La partícula parte del origen, ξ=0, θ=0, con velocidad dξ/dτ=2, dθ/dτ=0. Observamos su movimiento en espiral durante τ=80
% x(1) es r, x(2) dr/dt, x(3) es th, x(4) dth/dt
fg=@(t,x)[x(2); x(1)*x(4)^2+x(1)+2*x(1)*x(4)-x(2)/sqrt(x(2)^2+x(1)^2*x(4)^2);
x(4); -2*x(2)*x(4)/x(1)-2*x(2)/x(1)-x(4)/sqrt(x(2)^2+x(1)^2*x(4)^2)];
[~,x]=ode45(fg,linspace(0,80,300),[eps, 2, 0, 0]);
xx=x(:,1).*cos(x(:,3));
yy=x(:,1).*sin(x(:,3));
plot(xx,yy)
axis equal
grid on
xlabel('x')
ylabel('y');
title('Partícula sobre un disco en rotación')
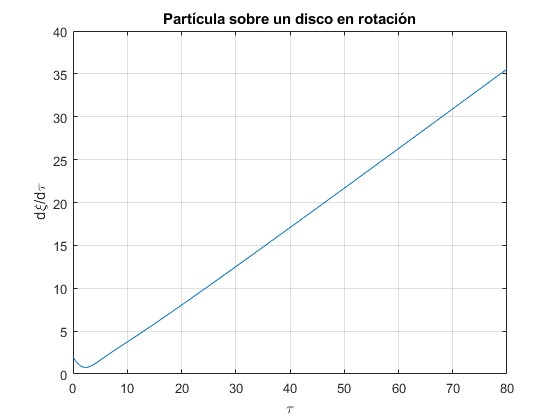
Representamos la velocidad radial dξ/dτ en función del tiempo τ. Después de un cierto tiempo, vemos que esta velocidad se incrementa linealmente con el tiempo. Las condiciones iniciales son ξ=0, θ=0, con velocidad dξ/dτ=2, dθ/dτ=0
% x(1) es r, x(2) dr/dt, x(3) es th, x(4) dth/dt
fg=@(t,x)[x(2); x(1)*x(4)^2+x(1)+2*x(1)*x(4)-x(2)/sqrt(x(2)^2+x(1)^2*x(4)^2);
x(4); -2*x(2)*x(4)/x(1)-2*x(2)/x(1)-x(4)/sqrt(x(2)^2+x(1)^2*x(4)^2)];
[t,x]=ode45(fg,linspace(0,80,300),[eps, 2, 0, 0]);
plot(t,x(:,2))
grid on
xlabel('\tau')
ylabel('d\xi/d\tau');
title('Partícula sobre un disco en rotación')
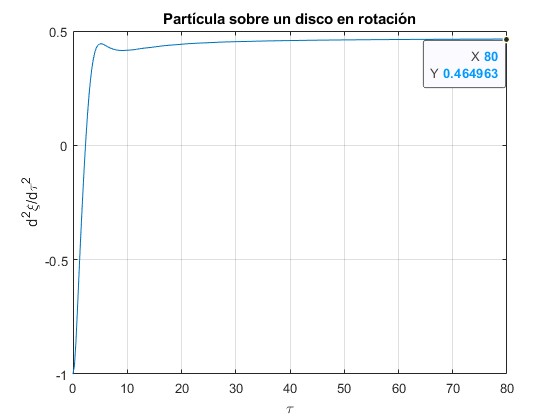
Representamos la aceleración radial d2ξ/dτ2 en función del tiempo τ. Después de un cierto tiempo, vemos que tiende al valor constante que es independiente de las condiciones iniciales. Probar tambien con ξ=1, θ=0, con velocidad dξ/dτ=2, dθ/dτ=0
fg=@(t,x)[x(2); x(1)*x(4)^2+x(1)+2*x(1)*x(4)-x(2)/sqrt(x(2)^2+x(1)^2*x(4)^2);
x(4); -2*x(2)*x(4)/x(1)-2*x(2)/x(1)-x(4)/sqrt(x(2)^2+x(1)^2*x(4)^2)];
[t,x]=ode45(fg,linspace(0,80,300),[eps, 2, 0, 0]);
acel=x(:,1).*x(:,4).^2+x(:,1)+2*x(:,1).*x(:,4)-x(:,2)./sqrt(x(:,2).^2+
x(:,1).^2.*x(:,4).^2);
plot(t,acel)
grid on
xlabel('\tau')
ylabel('d^2\xi/d\tau^2');
title('Partícula sobre un disco en rotación')
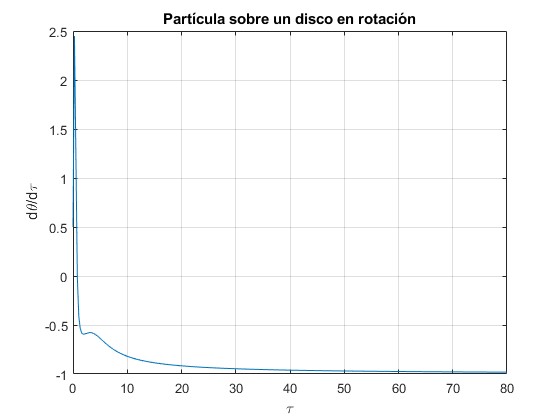
Representamos la velocidad angular dθ/dτ en función del tiempo τ. Después de un cierto tiempo, vemos que esta velocidad se mantiene constante e igual a -1. Las condiciones iniciales son ξ=1, θ=0, con velocidad dξ/dτ=-2, dθ/dτ=0.5
% x(1) es r, x(2) dr/dt, x(3) es th, x(4) dth/dt
fg=@(t,x)[x(2); x(1)*x(4)^2+x(1)+2*x(1)*x(4)-x(2)/sqrt(x(2)^2+x(1)^2*x(4)^2);
x(4); -2*x(2)*x(4)/x(1)-2*x(2)/x(1)-x(4)/sqrt(x(2)^2+x(1)^2*x(4)^2)];
[t,x]=ode45(fg,linspace(0,80,300),[1, -2, 0, 0.5]);
plot(t,x(:,4))
grid on
xlabel('\tau')
ylabel('d\theta/d\tau');
title('Partícula sobre un disco en rotación')
Sistema de Referencia inercial
Como hemos apreciado, una partícula en reposo sobre la plataforma en rotación describe una trayectoria circular de radio r respecto al Sistema de Referencia Inercial o Sistema de Laboratorio. En este apartado, vamos a describir el movimiento de la partícula en este Sistema de Referencia
Sea una partícula de masa m que está situada sobre una plataforma en rotación con velocidad angular constante Ω. En un instante dado t, la posición de la partícula es (x, y) y su velocidad (vx, vy) referidas a Sistema de Referencia Inercial OXY. El vector velocidad relativa de la partícula respecto a la plataforma es
La fuerza de rozamiento que ejerce la plataforma sobre la partícula cuando desliza, es constante en módulo, μk·N=μk·mg y de sentido contrario a la dirección de la velocidad relativa. μk es el coeficiente cinético
Las ecuaciones del movimiento cuando el cuerpo desliza son:
Ecuaciones del movimiento
Las ecuaciones del movimiento en coordendas polares son
Simplificamos las ecuaciones definiendo las variables adimensiones τ=t·Ω y ξ=r/R=rΩ2/(μk·mg).
Las condiciones iniciales son las siguientes:
Se lanza la partícula en el instante τ=0, desde la posición ξ0, con velocidad V0 haciendo un ángulo φ en el sistema de referencia de la plataforma
Las componentes de la velocidad inicial de la partícula medida en el Sistema de Referencia Inercial respecto del cual la plataforma gira con velocidad angular de una unidad (en el sistema de unidades establecido) es
Partícula en reposo
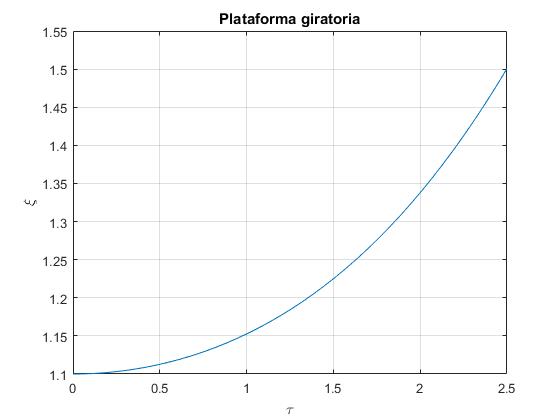
Si la partícula parte del reposo, V0=0, con respecto a la plataforma desde una posición ξ0<1 (r<R) la partícula continuará en reposo sobre la plataforma en dicha posición. Consideremos que la posición inicial de la partícula en reposo sobre la plataforma es ξ0>1
x0=[1.1,eps,0,1]; %eps evita la división 0/0
%x(1) x, x(2) dx/dt, x(3) dth
fg=@(t,x)[x(2); x(4)^2*x(1)-x(2)/sqrt(x(1)^2*(1-x(4))^2+x(2)^2); x(4);
-2*x(2)*x(4)/x(1)+(1-x(4))/sqrt(x(1)^2*(1-x(4))^2+x(2)^2)];
[t,x]=ode45(fg,[0,2.5],x0);
plot(t,x(:,1))
grid on
xlabel('\tau')
ylabel('\xi');
title('Plataforma giratoria')
Partícula en movimiento relativo
Dibujamos las trayectorias de partículas vistas por el observador inercial para tres condiciones iniciales diferentes:
- La trayectoria '1' corresponde a las condiciones iniciales: ξ0=0.5, V0=1 y φ=π.
- La trayectoria '2' corresponde a las condiciones iniciales: ξ0=0.5, V0=0.6 y φ=0.
- La trayectoria '3' corresponde a las condiciones iniciales: ξ0=1.1, V0=1.3 y φ=1.2π.
%x(1) x, x(2) dx/dt, x(3) dth
fg=@(t,x)[x(2); x(4)^2*x(1)-x(2)/sqrt(x(1)^2*(1-x(4))^2+x(2)^2); x(4);
-2*x(2)*x(4)/x(1)+(1-x(4))/sqrt(x(1)^2*(1-x(4))^2+x(2)^2)];
hold on
x0=[0.5,-1,0,1];
[t,x]=ode45(fg,[0,10],x0);
plot(x(:,1).*cos(x(:,3)), x(:,1).*sin(x(:,3)))
x0=[0.5,0.6,0,1];
[t,x]=ode45(fg,[0,10],x0);
plot(x(:,1).*cos(x(:,3)), x(:,1).*sin(x(:,3)))
x0=[1.1,1.3*cos(1.2*pi),0,1+1.3*sin(1.2*pi)/1.1];
[t,x]=ode45(fg,[0,10],x0);
plot(x(:,1).*cos(x(:,3)), x(:,1).*sin(x(:,3)))
hold off
grid on
legend('1','2','3')
axis equal
xlabel('\xi·cos\theta')
ylabel('\xi·sin\theta');
title('Plataforma giratoria')
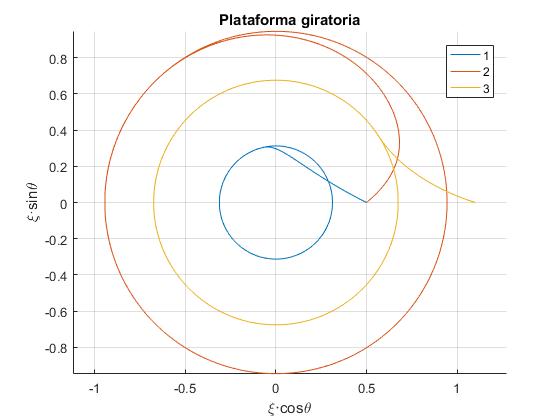
Lo curioso de la última trayectoria, es que una partícula con ξ0>1, acaba en reposo sobre la plataforma en la región ξ<1
Dibujamos las trayectorias de partículas vistas por el observador inercial para dos condiciones iniciales diferentes muy próximas:
- La trayectoria azul corresponde a las condiciones iniciales: ξ0=0.2, V0=0.97 y φ=0.
- La trayectoria rosa corresponde a las condiciones iniciales: ξ0=0.2, V0=0.971 y φ=0.
d=0.2; %distancia al origen
fg=@(t,x)[x(2); x(4)^2*x(1)-x(2)/sqrt(x(1)^2*(1-x(4))^2+x(2)^2); x(4);
-2*x(2)*x(4)/x(1)+(1-x(4))/sqrt(x(1)^2*(1-x(4))^2+x(2)^2)];
hold on
V0=0.97; %velocidad inicial (referido a la plataforma)
angulo=0; %ángulo (grados)
x0=[d,V0*cos(angulo*pi/180),0,1+V0*sin(angulo*pi/180)/d];
[t,x]=ode45(fg,[0,10],x0);
plot(x(:,1).*cos(x(:,3)), x(:,1).*sin(x(:,3)))
V0=0.971;
angulo=0;
x0=[d,V0*cos(angulo*pi/180),0,1+V0*sin(angulo*pi/180)/d];
[t,x]=ode45(fg,[0,10],x0);
plot(x(:,1).*cos(x(:,3)), x(:,1).*sin(x(:,3)))
hold off
grid on
axis equal
xlabel('\xi·cos\theta')
ylabel('\xi·sin\theta');
title('Plataforma giratoria')
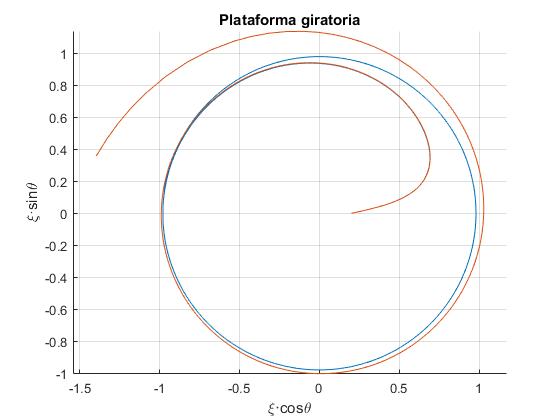
La primera partícula acaba en reposo sobre la plataforma a una distancia ξ<1 del origen. Mientras que la otra se va al infinito ξ→∞
Fijada una distancia ξ0<1, podríamos investigar, para qué velocidades V0 y ángulos φ la partícula escapa al infinito
Comprobación
Hemos descrito el movimiento de la partícula en el Sistema de Referencia inercial
Hemos descrito el movimiento de la partícula en el Sistema de Referencia no inercial
Resolvemos el sistema de ecuaciones diferenciales para las condiciones iniciales: la partícula parte del origen (ξ=0, θ=0) con velocidad dξ/dτ=2, dθ/dτ=0
Resolvemos el sistema de ecuaciones diferenciales con las mismas condiciones iniciales: la partícula parte del origen (ξ=0, θ=0) con velocidad dξ/dτ=2, dθ/dτ=0
Relacionamos los dos sistemas mediante una simple transformación
hold on
%Sistema de Referencia inercial
f=@(t,x)[x(2); x(4)^2*x(1)-x(2)/sqrt(x(1)^2*(1-x(4))^2+x(2)^2); x(4);
-2*x(2)*x(4)/x(1)+(1-x(4))/sqrt(x(1)^2*(1-x(4))^2+x(2)^2)];
[~,x]=ode45(f,[0,10],[eps, 2, 0, 0]);
plot(x(:,1).*cos(x(:,3)),x(:,1).*sin(x(:,3)),'b')
%Sistema de Referencia no inercial
g=@(t,x)[x(2); x(1)*x(4)^2+x(1)+2*x(1)*x(4)-x(2)/sqrt(x(2)^2+x(1)^2*x(4)^2);
x(4); -2*x(2)*x(4)/x(1)-2*x(2)/x(1)-x(4)/sqrt(x(2)^2+x(1)^2*x(4)^2)];
[t,x]=ode45(g,[0,10],[eps, 2, 0, 0]);
x1=x(:,1).*cos(x(:,3));
y1=x(:,1).*sin(x(:,3));
plot(x1,y1,'r')
%relación
xx=x1.*cos(t)-y1.*sin(t);
yy=x1.*sin(t)+y1.*cos(t);
plot(xx,yy,'k')
hold off
axis equal
grid on
xlabel('x')
ylabel('y');
title('Partícula sobre un disco en rotación')
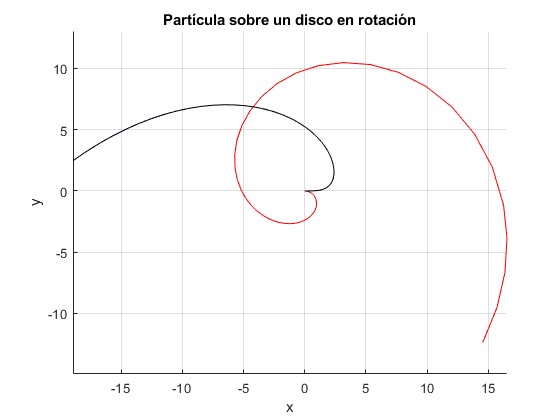
- En color rojo, la trayectoria en el Sistema de Referencia no inercial, que se obtiene resolviendo el segundo sistema de dos ecuaciones diferenciales
- En color azul, la trayectoria en el Sistema de Referencia inercial, que se obtiene resolviendo el primer sistema de dos ecuaciones diferenciales
- En color negro, la trayectoria en el Sistema de Referencia inercial obtenida a partir de la trayectoria en el Sistema de Referencia no inercial mediante la transformación
Referencias
YU Feng-jun. The motion of a particle on a non - smooth rotating disk. Volume 37, n° 2, 2018
Akshat Agha, Sahil Gupta, Toby Joseph. Particle sliding on a turntable in the presence of friction. Am. J. Phys. 83 (2) February 2015 pp 126-132