

Una partícula desliza sobre una pista circular que gira
Consideremos un aro de radio R que puede girar alrededor de su diámetro vertical con velocidad angular ω. Un punto material de masa m se mueve a lo largo de la circunferencia sin rozamiento. Su posición está dada por el ángulo θ tal como se señala en la figura.
Las fuerzas que actúan sobre la partícula, cuando estamos situados en el Sistema de Referencia en rotación son:
- El peso, mg
- La fuerza centrífuga, Fc=mω2Rsinθ
- La reacción N de la superficie circular.
Descomponemos las fuerzas en la dirección vertical y horizontal. En la situación de equilibrio, se cumplirá que
N·cosθ =mg
N·sinθ =Fc
N=mgcosθ+Fcsinθ=mgcosθ+mω2Rsin2θ
Energía potencial. Posiciones de equilibrio
Si descomponemos las fuerzas en la dirección tangencial y normal a la circunferencia, tendremos que en la situación de equilibrio
mg·sinθ =Fc·cosθ
La partícula está en equilibrio en la dirección normal. Si no está en equilibrio en la dirección tangencial, la fuerza neta en esta dirección es
F= -mg·sinθ +Fc·cosθ= -mg·sinθ +mω2·R·sinθ ·cosθ
Esta fuerza depende solamente de la posición θ y es conservativa. La energía potencial correspondiente a la fuerza F(θ) es
Tomando como nivel cero de energía potencial Ep(0)=0 para θ=0, integramos y haciendo algunas operaciones, se obtiene
Para ω2<g/R, la curva de la energía potencial Ep(θ) presenta un mínimo en θe=0 o posición de equilibrio estable.
Para ω2>g/R, la curva de la energía potencial Ep(θ) presenta un mínimo para
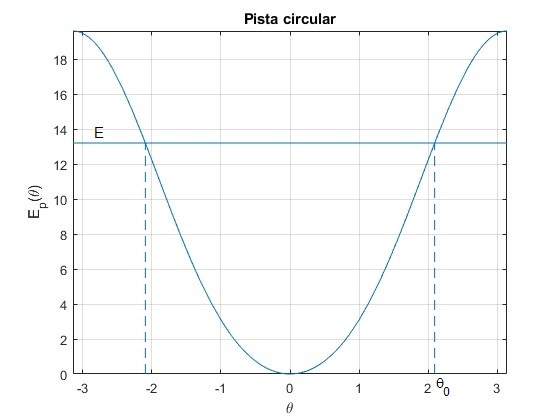
Cuando la la energía de la partícula E>0
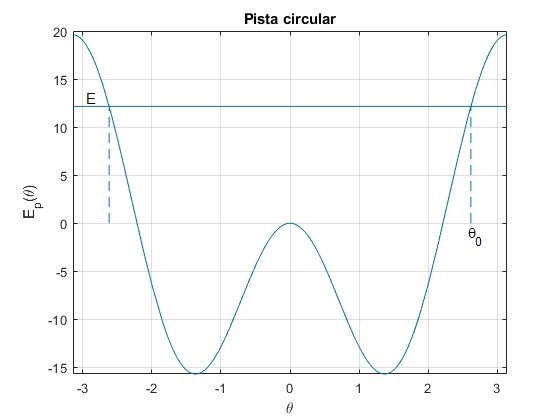
Cuando la la energía de la partícula Em<E<0
Supongamos que la partícula de masa m parte de la posición θ0 en reposo. Su energía es E=Ep(θ0). Como la energía potencial es una función simétrica, la partícula se mueve entre las posiciones angulares (-θ0, θ0)
posición de equilibrio estable θe y un máximo local para θm=0, posición de equilibrio inestable. La energía potencial mínima para θe vale
Hay dos posibles casos
Supongamos que la partícula de masa m parte de la posición θ0 en reposo. Su energía es E=Ep(θ0). Como la energía potencial es una función simétrica, la partícula se mueve entre las posiciones angulares (-θ0, θ0)
Si la energía de la partícula es negativa E<0, y mayor que la mínima Em, la partícula se moverá entre θ0 y θ1 (figura más abajo)
Una de las raíces de la ecuación de segundo grado es cosθ0 y la otra cosθ1
w=7; %velocidad angular de rotación
R=1; %radio de la pista circular
Ep=@(x) 9.8*R*(1-cos(x))-w^2*R^2*sin(x).^2/2;
fplot(Ep,[-pi,pi])
th_0=2*pi/3; %ángulo inicial, 120º, parte del reposo
E=Ep(th_0); %energía constante
line([-pi,pi],[E,E])
C=2*(E-9.8*R)/(R*w)^2+1; %constantes
lambda=9.8/(R*w^2);
if (lambda<1 && E<0)
th_1=acos(lambda+sqrt(lambda^2+C));
th_2=acos(lambda-sqrt(lambda^2+C));
else
th_1=th_0;
th_2=-th_0;
end
line([th_1,th_1],[0, E], 'lineStyle', '--')
line([th_2,th_2],[0, E], 'lineStyle', '--')
Emin=9.8*R-9.8^2/(2*w^2)-w^2*R^2/2;
grid on
xlabel('\theta')
ylabel('E_p(\theta)')
title('Pista circular')
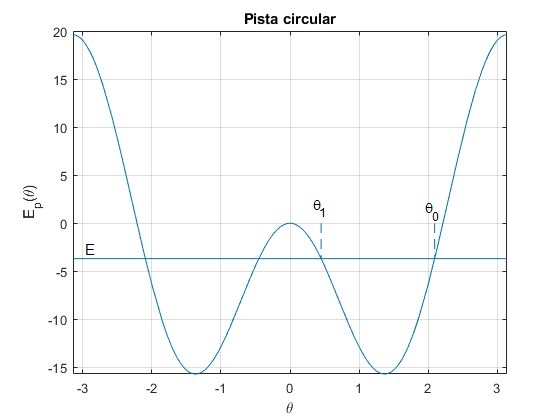
La partícula se puede mover en el intervalo angular (θ1, θ0) o bien, en el intervalo simétrico (-θ1, -θ0)
Ejemplo.
- Velocidad angular de rotación, ω=7.0 rad/s
- Radio de la pista circular, R=1.0 m
- Posición angular inicial, θ0=120º
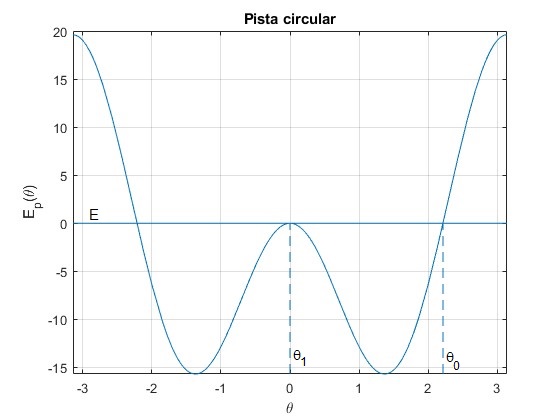
Calculamos la energía total E de la partícula y los ángulos θ1=25.8° y θ0=120° (posición de partida)
>> E E = -3.6750 >> [th_1,th_2]*180/p ans = 25.8419 120.0000
Descripción cualitativa del movimiento de la partícula
La partícula parte del reposo en la posición θ0. Su energía total E es
Cuando ω2<g/R
Cuando ω2>g/R, hay dos posiblidades
- cuando la energía E<0, a la izquierda en la figura
- cuando E>0, a la derecha
La curva de energía potencial Ep(θ) se muestra en la figura en color azul.
La partícula se desplaza desde la posición inicial θ0 hacia la posición de equilibrio θ=0. En dicha posición, la energía potencial es mínima Ep(0)=0 y la energía cinética de la partícula es máxima, a continuación, se desplaza hasta la posición simétrica θ=-θ0 donde su velocidad vuelve a ser cero, retornando posteriormente a la posición de equilibrio.
En la posición θ de la figura, el segmento de color azul mide la energía potencial y el segmento de color rojo, la energía cinética.
La partícula oscila alrededor de la posición de equilibrio estable θ=0 con un determinado periodo.
La curva de energía potencial Ep(θ) se muestra en las figuras en color azul.
La partícula se desplaza desde la posición inicial θ0 hacia la posición de equilibrio
En la figura de la izquierda, la energía total E<0 y la partícula oscila alrededor de la posición de equilibrio estable θe.
En la posición θ de la figura, el segmento de color azul mide la energía potencial y el segmento de color rojo, la energía cinética. La energía potencial es mínima en la posición de equilibrio y la energía cinética es máxima.
Los puntos de retorno, aquellos en los que la velocidad es nula y por tanto, la partícula inicia el movimiento en sentido contrario,.
Sin rozamiento
La ecuación del movimiento es, fuerza neta F igual a la masa por aceleración tangencial
Se resuelve esta ecuación diferencial por procedimientos numéricos, con las siguientes condiciones iniciales, en el instante t=0, θ=θ0, dθ/dt=0.
Solución analítica
La energía de la partícula es la suma de la energía cinética y potencial. La partícula se mueve con velocidad R·dθ/dt a lo largo de la pista circular
Despejamos la velocidad angular dθ/dt e integramos para obtener la posición angular θ en función del tiempo t
Teniendo en cuenta las relaciones trigonométricas
Hacemos el cambio de variable
La integral se expresa en términos de la variable x
Buscamos en una tabla de integrales (véase la referencias) la solución para cada uno de los dos posibles casos:
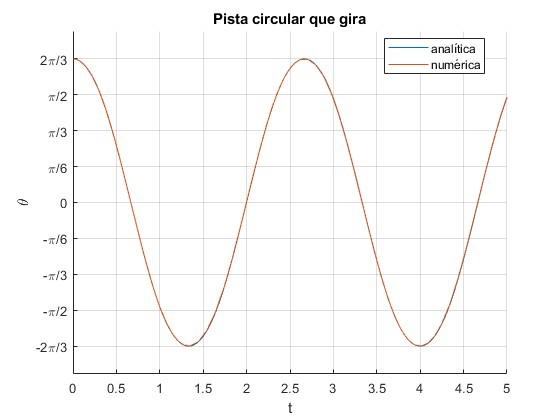
Cuando la energía total es negativa, Em<E<0 y mayor que la mínima, para ω2>g/R (λ<1). La partícula se mueve en el intervalo (θ1, θ0)
- Velocidad angular de rotación, ω=7.0 rad/s
- Radio de la pista circular, R=1.0 m
- Posición angular inicial, θ0=120º
Cuando la energía total es positiva, E>0, para ω2>g/R (λ<1) y para ω2<g/R (λ>1). La partícula se mueve en el intervalo (-θ0, θ0)
- Velocidad angular de rotación, ω=7.0 rad/s
- Radio de la pista circular, R=1.0 m
- Posición angular inicial, θ0=150º
- Velocidad angular de rotación, ω=2.0 rad/s
- Radio de la pista circular, R=1.0 m
- Posición angular inicial, θ0=120º
Comprobamos que el coeficiente a es negativo. Expresamos el polinomio como producto de factores
Comprobamos que x0,1 se corresponden con las posiciones de retorno θ0,1
Buscamos la integral en la Tabla, página 282, 3.152, n° 9
El resultado de la integral es
Despejamos la variable x, véase la página Integrales elípticas
Dehacemos el cambio de variable x=tan(θ/2)
Ejemplo.
La partícula se mueve entre las posciones angulares θ0=120° (de partida) y θ1=25.84°
w=7; %velocidad angular de rotación
R=1; %radio de la pista circular
th_0=2*pi/3; %ángulo inicial, 120º, parte del reposo
E=9.8*R*(1-cos(th_0))-w^2*R^2*sin(th_0).^2/2; %energía constante
C=2*(E-9.8*R)/(R*w)^2+1; %constantes
lambda=9.8/(R*w^2);
th_1=acos(lambda+sqrt(lambda^2+C)); %posiciones extremas
th_0=acos(lambda-sqrt(lambda^2+C));
x0=(1+C+2*sqrt(lambda^2+C))/(1+2*lambda-C); %cuadrado de x_0
x1=(1+C-2*sqrt(lambda^2+C))/(1+2*lambda-C); %cuadrado de x_1
a=C-1-2*lambda; %coeficiente
th=@(t) 2*atan(sqrt(x1)./sqrt(1-(1-x1/x0)*ellipj(sqrt(x0)
*sqrt(-a)*w*t/2,1-x1/x0).^2));
hold on
fplot(th,[0,5])
%solución numérica
f=@(t,x) [x(2); (w^2*cos(x(1))-9.8/R)*sin(x(1))];
[t,x]=ode45(f,[0,5],[th_1,0]);
plot(t,x(:,1))
hold off
grid on
xlabel('t')
ylabel('\theta')
set(gca,'YTick',0:pi/6:pi)
set(gca,'YTickLabel',{'0','\pi/6','\pi/3','\pi/2','2\pi/3', '5\pi/6', '\pi'})
legend('analítica','numérica','Location', 'best')
title('Pista circular que gira')
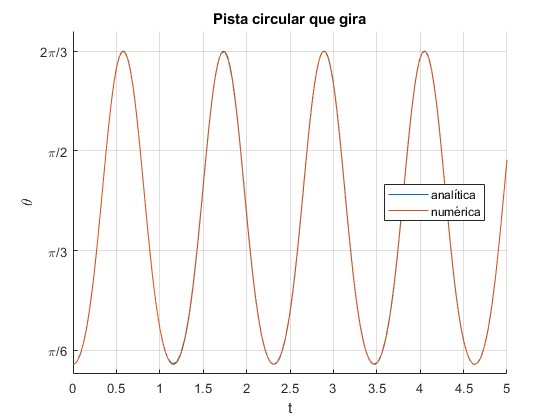
Vemos que la soluciones analítica y numérica, utilizando el procedimiento
Comprobamos que en el procedimiento numérico, la energía se mantiene aproximadamente constante
>> Energia=x(:,2).^2*R^2/2-w^2*R^2*sin(x(:,1)).^2/2+9.8*R*(1-cos(x(:,1))) Energia = -3.6750 -3.6750 .... -3.6414 -3.6403
El coeficiente a es negativo, el cuadrado de x1 es negativo
Buscamos la integral en la Tabla, página 282, 3.152, n° 4
El resultado de la integral es
Despejamos la variable x, véase la página Integrales elípticas
Hemos utilizado la propiedad, sn2(x|k)+cn2(x|k)=1. Dehacemos el cambio de variable x=tan(θ/2)
Ejemplo: λ<1, E>0
La partícula se mueve entre las posciones angulares θ0=150° (de partida) y θ1=-150°
w=7; %velocidad angular de rotación
R=1; %radio de la pista circular
th_0=5*pi/6; %ángulo inicial, 150º, parte del reposo
E=9.8*R*(1-cos(th_0))-w^2*R^2*sin(th_0).^2/2; %energía constante
C=2*(E-9.8*R)/(R*w)^2+1; %constantes
lambda=9.8/(R*w^2);
a=C-1-2*lambda;
%th_1=acos(lambda+sqrt(lambda^2+C));
%th_0=acos(lambda-sqrt(lambda^2+C));
x0=(1+C+2*sqrt(lambda^2+C))/(1+2*lambda-C); %cuadrado de x_0
x1=(1+C-2*sqrt(lambda^2+C))/(1+2*lambda-C); %cuadrado de x_1
x1=abs(x1);
hold on
t=linspace(0,5,200);
[~,cn,~]=ellipj(sqrt(x0+x1)*sqrt(-a)*w*t/2,x0/(x0+x1));
th=2*atan(sqrt(x0)*cn);
plot(t,th)
%solución numérica
f=@(t,x) [x(2); (w^2*cos(x(1))-9.8/R)*sin(x(1))];
[t,x]=ode45(f,[0,5],[th_0,0]);
plot(t,x(:,1))
hold off
grid on
xlabel('t')
ylabel('\theta')
legend('analítica','numérica','Location', 'best')
set(gca,'YTick',-pi:pi/6:pi)
set(gca,'YTickLabel',{'-\pi', '-5\pi/6', '-2\pi/3', '-\pi/2', '-\pi/3',
'-\pi/6', '0','\pi/6','\pi/3','\pi/2','2\pi/3', '5\pi/6', '\pi'})
title('Pista circular que gira')
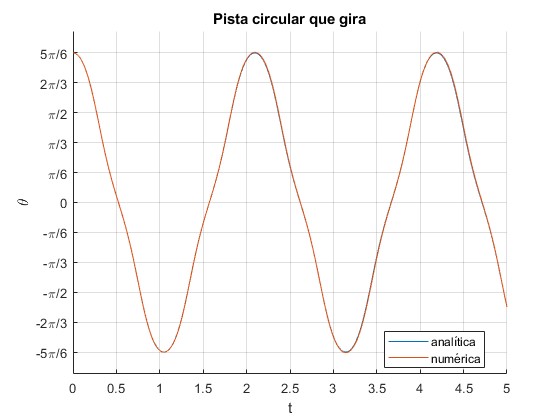
Vemos que la soluciones analítica y numérica, utilizando el procedimiento
Comprobamos que en el procedimiento numérico, la energía se mantiene aproximadamente constante
>> Energia=x(:,2).^2*R^2/2-w^2*R^2*sin(x(:,1)).^2/2+9.8*R*(1-cos(x(:,1))) Energia = 12.1620 12.1620 .... 12.5429 12.5406
Ejemplo: λ>1
La partícula se mueve entre las posciones angulares θ0=120° (de partida) y θ1=-120°
Vemos que la soluciones analítica y numérica, utilizando el procedimiento
Caso particular, E=0, ω2>g/R (λ<1)
Un caso particular importante se produce cuando la energía E de la partícula es nula, en el caso ω2>g/R (λ<1)
w=7; %velocidad angular de rotación
R=1; %radio de la pista circular
Ep=@(x) 9.8*R*(1-cos(x))-w^2*R^2*sin(x).^2/2;
fplot(Ep,[-pi,pi])
E=0; %energía constante
line([-pi,pi],[E,E])
lambda=9.8/(R*w^2);
th_0=acos(2*lambda-1);
Emin=9.8*R-9.8^2/(2*w^2)-w^2*R^2/2;
line([0,0],[Emin, E], 'lineStyle', '--')
line([th_0,th_0],[Emin, E], 'lineStyle', '--')
grid on
xlabel('\theta')
ylabel('E_p(\theta)')
title('Pista circular')
Para la energía E=0, el ángulo inicial θ0=127°
>> th_0*180/pi ans = 126.8699
Resolvemos la integral, haciendo el cambio devariable x=tan(θ/2)
Buscamos la integral en la Tabla, página 97, 2.266, caso (a>0, Δ<0)
Desahaciendo el cambio de variable
Ejemplo.
- Velocidad angular de rotación, ω=7.0 rad/s
- Radio de la pista circular, R=1.0 m
- Energía E=0. Posición angular inicial, θ0=127º
w=7; %velocidad angular de rotación
R=1; %radio de la pista circular
E=0; %energía constante
%solución numérica
f=@(t,x) [x(2); (w^2*cos(x(1))-9.8/R)*sin(x(1))];
[t,x]=ode45(f,[0,5],[th_0,0]);
hold on
plot(t,x(:,1))
%solución analítica
C=2*(E-9.8*R)/(R*w)^2+1; %constantes
lambda=9.8/(R*w^2);
th_0=acos(lambda-sqrt(lambda^2+C));
x0=(1+C+2*sqrt(lambda^2+C))/(1+2*lambda-C); %cuadrado de x_0
th=@(t) 2*atan(sqrt((1-lambda)/lambda)./cosh(sqrt(1-lambda)*(w*t)));
fplot(th,[0,5])
hold off
grid on
xlabel('t')
ylabel('\theta')
legend('numérica', 'analítica','Location', 'best')
set(gca,'YTick',0:pi/6:pi)
set(gca,'YTickLabel',{'0','\pi/6','\pi/3','\pi/2','2\pi/3', '5\pi/6', '\pi'})
title('Pista circular que gira')
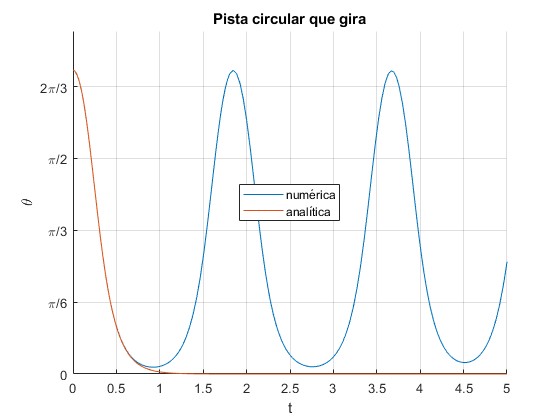
En la solución analítica, la partícula parte de la posición θ0=127° y tiende a la posición θ1=0, que alcanza después de un tiempo infinito. Esta posición es de equilibrio inestable, cualquier perturbación, por pequeña que sea, hace que la partícula regrese a la posición de partida.
Comprobamos que en el procedimiento numérico, la energía se mantiene aproximadamente constante
>> Energia=x(:,2).^2*R^2/2-w^2*R^2*sin(x(:,1)).^2/2+9.8*R*(1-cos(x(:,1)))
Energia =
0.0000
0.0000
....
-0.1305
-0.1304
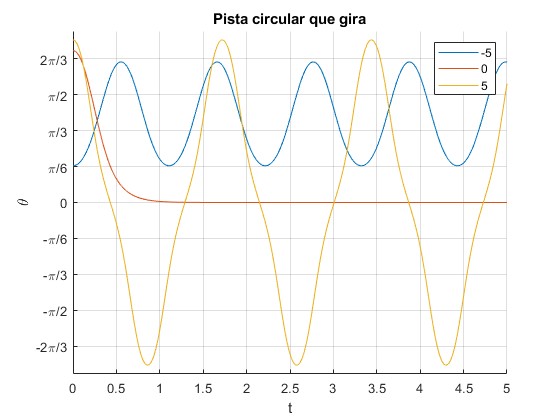
Resumen: ω2>g/R (λ<1)
La situación más importante se produce para ω2>g/R (λ<1). Por ejemplo: la velocidad angular de rotación, ω=7.0 rad/s, radio de la pista circular, R=1.0 m
Representamos en el mismo script, la posición angular θ(t) de la partícula para tres valores de la energía
- E<0
- E=0
- E>0
w=7; %velocidad angular de rotación
R=1; %radio de la pista circular
hold on
for E=[-5,0,5]
C=2*(E-9.8*R)/(R*w)^2+1; %constantes
lambda=9.8/(R*w^2);
% th_1=acos(lambda+sqrt(lambda^2+C)); %ángulos extremos
% th_0=acos(lambda-sqrt(lambda^2+C));
x0=(1+C+2*sqrt(lambda^2+C))/(1+2*lambda-C); %cuadrado de x_0
x1=(1+C-2*sqrt(lambda^2+C))/(1+2*lambda-C); %cuadrado de x_1
if E<0
a=C-1-2*lambda; %coeficiente
th=@(t) 2*atan(sqrt(x1)./sqrt(1-(1-x1/x0)*ellipj(sqrt(x0)*
sqrt(-a)*w*t/2,1-x1/x0).^2));
fplot(th,[0,5],'displayName',num2str(E))
elseif E>0
x1=abs(x1);
t=linspace(0,5,200);
[~,cn,~]=ellipj(sqrt(x0+x1)*sqrt(-a)*w*t/2,x0/(x0+x1));
th=2*atan(sqrt(x0)*cn);
plot(t, th, 'displayName',num2str(E))
else
th=@(t) 2*atan(sqrt((1-lambda)/lambda)./cosh(sqrt(1-lambda)*(w*t)));
fplot(th,[0,5],'displayName',num2str(E))
end
end
hold off
grid on
xlabel('t')
legend('-DynamicLegend','location','northeast')
ylabel('\theta')
set(gca,'YTick',-pi:pi/6:pi)
set(gca,'YTickLabel',{'-\pi', '-5\pi/6', '-2\pi/3', '-\pi/2', '-\pi/3',
'-\pi/6', '0','\pi/6','\pi/3','\pi/2','2\pi/3', '5\pi/6', '\pi'})
title('Pista circular que gira')
Con rozamiento
Supongamos que el coeficiente de rozamiento entre la partícula y la superficie circular sobre la que desliza es μs. La partícula permanecerá en reposo si Fr/N<μs
La reacción N de la superficie circular es
N=mgcosθ+Fcsinθ=mgcosθ+mω2R·sin2θ
La reacción N se anula para el ángulo
Representamos N/mg en función de θ para dos velocidades angulares de rotación ω=2, 7 rad/s
R=1; %radio
hold on
for w=[2,7] %velocidad angular de rotación
f=@(x) cos(x)+w^2*R*sin(x).^2/9.8;
th=acos((9.8/(w^2*R)-sqrt((9.8/(w^2*R))^2+4))/2);
fplot(f,[0,th],'displayName',num2str(w))
disp(th*180/pi)
end
hold off
grid on
set(gca,'XTick',0:pi/6:pi)
set(gca,'XTickLabel',{'0','\pi/6','\pi/3','\pi/2','\pi/3',
'2\pi/3','5\pi/6','\pi'})
legend('-DynamicLegend','location','best')
xlabel('\theta')
ylabel('N/mg')
title('Pista con rozamiento'
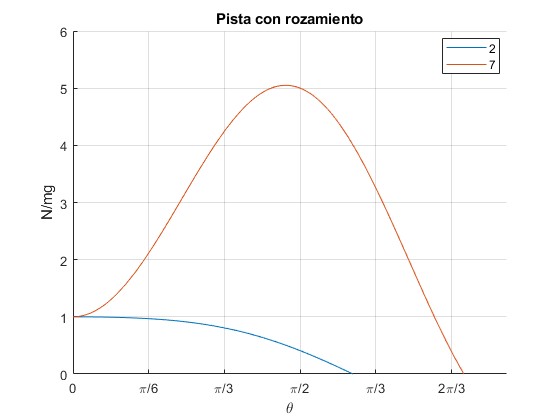
Los posiciones angulares para las cuales la reacción N de la pista se anula son, 110.9° y 154.8°, respectivamente
110.8754 154.8216
ω2<g/R
La posición de equilibrio estable es θe=0
Para θ>0, la componente tangencial del peso mgsinθ es mayor que la componente tangencial de la fuerza centrífuga, Fccosθ=mω2Rsinθ·cosθ. La fuerza de rozamiento es la diferencia Fr= mgsinθ-Fccosθ
Representamos Fr/N en función de θ para ω=2 rad/s, con R=1.0 m.
R=1; %radio
w=2; %velocidad angular de rotación
f=@(x) (9.8*sin(x)-w^2*R*sin(x).*cos(x))./(9.8*cos(x)+w^2*R*sin(x).^2);
fplot(f,[0,pi/3])
mu=0.4; %coeficiente estático
g=@(x) 9.8*sin(x)-w^2*R*sin(x)*cos(x)-mu*(9.8*cos(x)+w^2*R*sin(x)^2);
th_1=fzero(g,[0,pi/3]);
line([th_1,th_1],[0,mu],'lineStyle','--')
line([0,th_1],[mu,mu],'lineStyle','--')
grid on
set(gca,'XTick',0:pi/12:pi/3)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3'})
xlabel('\theta')
ylabel('F_r/N')
title('Pista con rozamiento')
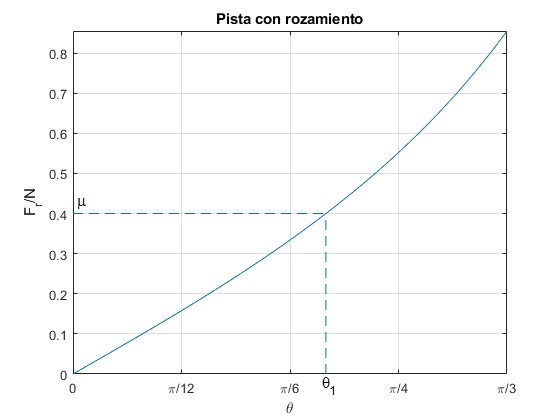
Dado el coeficiente de rozamiento μs, las posiciones θ en las que la partícula está en equilibrio serán aquellas para las que Fr/N<μs, es decir θ<θ1
El ángulo θ1 se calcula resolviendo la ecuación trascendente, Fr=μsN, utilizando la función
El ángulo θ1 en grados es
>> th_1*180/pi ans = 34.9675
Si la posición inicial de la partícula θ0>θ1 la partícula desliza hacia abajo, la velocidad angular es negativa dθ/dt<0. Las fuerzas sobre la partícula se han mostrado en la figura más arriba. La ecuación del movimiento es
Se resuelve esta ecuación diferencial por procedimientos numéricos, con las siguientes condiciones iniciales, en el instante t=0, θ=θ0, dθ/dt=0.
Supongamos que el coeficiente cinético de la pista es μs=μk=0.4 y la partícula parte en reposo desde la posición θ0=π/3 (60°) que es mayor que θ1
function pista_1
R=1; %radio
w=2; %velocidad angular de rotación
mu=0.4; %coeficiente estático y cinético
f=@(t,x) [x(2); (w^2*cos(x(1))-9.8/R)*sin(x(1))+mu*(w^2*sin(x(1))^2
+9.8*cos(x(1))/R)];
opts=odeset('events',@stop_pista);
[t,x]=ode45(f,[0,10],[pi/3,0], opts);
plot(t,x(:,1)) %tiempo, posición
grid on
set(gca,'YTick',0:pi/12:pi/2)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3', '5\pi/12',
'\pi/2'})
xlabel('t')
ylabel('\theta');
title('Pista con rozamiento')
th=x(end,1);
disp([t(end), th*180/pi])
N=w^2*R*sin(th)^2+9.8*cos(th);
Fr=9.8*sin(th)-w^2*R*sin(th)*cos(th);
disp([Fr, mu*N])
function [value,isterminal,direction]=stop_pista(~,x)
value=x(2);
isterminal=1; %1 detiene cuando la velocidad se hace cero
direction=1;
end
end
Cuando la partícula se detiene, se verifica si |Fr/N|<μs en cuyo caso la partícula permanece en reposo, en caso contrario, continua su movimiento hasta la próxima posición de parada.
1.1585 7.9277
0.8052 3.9130
La partícula se detiene en la posición θ=7.93° empleando un tiempo de t=1.16 s.
En la posición en la que se detiene, la fuerza de rozamiento vale Fr=0.8052 que es menor que la máxima μsN=3.9130 N
ω2>g/R
Representamos Fr/N en función de θ para ω=7 rad/s, con R=1.0 m.
R=1; %radio
w=7; %velocidad angular de rotación
f=@(x) (9.8*sin(x)-w^2*R*sin(x).*cos(x))./(9.8*cos(x)+w^2*R*sin(x).^2);
hold on
fplot(f,[0,2*pi/3])
mu=0.4; %coeficiente estático
g=@(x) 9.8*sin(x)-w^2*R*sin(x)*cos(x)-mu*(9.8*cos(x)+w^2*R*sin(x)^2);
th_3=fzero(g,[0,2*pi/3]);
line([th_3,th_3],[0,mu],'lineStyle','--')
line([0,th_3],[mu,mu],'lineStyle','--')
%equilibrio
th_e=acos(9.8/(w^2*R));
plot(th_e,0,'ro','markersize',4,'markerfacecolor','r')
%mínimo
th_m=acos((-9.8+sqrt(9.8^2+4*(9.8^2+w^4*R^2)))/(2*w^2*R));
mu=-0.4; %coeficiente estático
g=@(x) 9.8*sin(x)-w^2*R*sin(x)*cos(x)-mu*(9.8*cos(x)+w^2*R*sin(x)^2);
th_1=fzero(g,[0,th_m]);
line([th_1,th_1],[0,mu],'lineStyle','--')
line([0,th_1],[mu,mu],'lineStyle','--')
th_2=fzero(g,[th_m, th_e]);
line([th_2,th_2],[0,mu],'lineStyle','--')
line([0,th_2],[mu,mu],'lineStyle','--')
hold off
disp([th_1, th_2, th_e, th_3]*180/pi)
grid on
xlim([0,2*pi/3])
set(gca,'XTick',0:pi/12:2*pi/3)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3', '5\pi/12',
'\pi/2', '7\pi/12','2\pi/3'})
xlabel('\theta')
ylabel('F_r/N')
title('Pista con rozamiento')
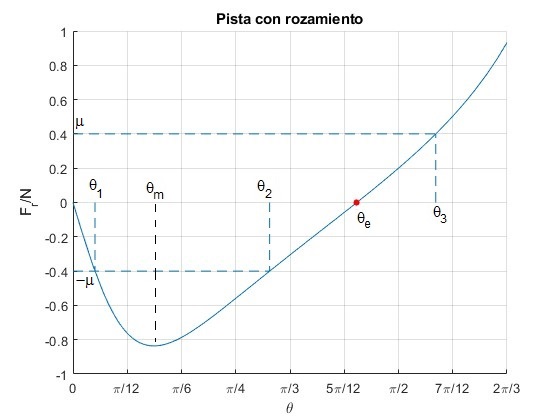
La fuerza de rozamiento es nula en la posición de equilibrio estable , se señala mediante un punto de color rojo en la figura, θe=78.46°
Observamos en la representación gráfica un mínimo en la posición θm, que se calcula derivando Fr/N respecto de θ e igualando a cero
Los ángulos límites θ1 y θ2 o θ3 para un valor dado del coeficiente de rozamiento μs y una determinada velocidad angular ω se calculan utilizando la función
|gsinθ-ω2Rsinθcosθ|=μ(gcosθ+ω2Rsin2θ)
6.0718 54.3757 78.4630 100.3107
Para θ>θe
La componente tangencial del peso mgsinθ es mayor que la componente tangencial de la fuerza centrífuga, Fccosθ. La fuerza de rozamiento es la diferencia Fr= mgsinθ-Fccosθ
Dado el coeficiente de rozamiento μs=0.4, las posiciones θ para las cuales la partícula está en equilibrio serán aquellas para las que Fr/N<μ, es decir θe≤θ<θ3.
Si la posición inicial de la partícula θ0>θ3, (θ3=100.31°), la partícula desliza hacia abajo, la velocidad angular es negativa dθ/dt<0. Las fuerzas sobre la partícula se muestran en la figura más arriba en el caso anterior. La ecuación del movimiento es la misma
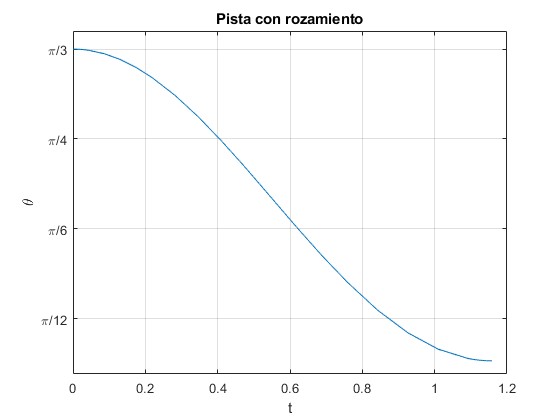
Supongamos que el coeficiente cinético de la pista es μs=μk=0.4 y la partícula parte en reposo desde la posición θ0=2π/3 (120°) que es mayor que θ3
function pista_2
R=1; %radio
w=7; %velocidad angular de rotación
mu=0.4; %coeficiente estático y cinético
f=@(t,x) [x(2); (w^2*cos(x(1))-9.8/R)*sin(x(1))+
mu*(w^2*sin(x(1))^2+9.8*cos(x(1))/R)];
opts=odeset('events',@stop_pista);
[t,x]=ode45(f,[0,10],[2*pi/3,0], opts);
plot(t,x(:,1)) %tiempo, posición
set(gca,'YTick',0:pi/12:2*pi/3)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3',
'5\pi/12','\pi/2', '7\pi/12','2\pi/3'})
xlabel('t')
ylabel('\theta');
title('Pista con rozamiento')
grid on
th=x(end,1);
disp([t(end), th*180/pi])
N=w^2*R*sin(th)^2+9.8*cos(th);
Fr=9.8*sin(th)-w^2*R*sin(th)*cos(th);
disp([Fr, mu*N])
function [value,isterminal,direction]=stop_pista(~,x)
%x(1) es x, x(3) es y
value=x(2);
isterminal=1; %1 detiene cuando la velocidad se hace cero
direction=1;
end
end
0.4364 80.9782
2.0901 19.7327
La partícula se detiene en la posición θ=81.0° empleando un tiempo de t=0.44 s.
En la posición en la que se detiene, la fuerza de rozamiento vale Fr=2.0901 que es menor que la máxima μsN=19.7327 N
Para θ<θe
La componente tangencial del peso mgsinθ es menor que la componente tangencial de la fuerza centrífuga, Fccosθ. La fuerza de rozamiento es la diferencia
Fr= Fccosθ- mgsinθ
En la figura anterior Fr/N en función de θ para θ<θe aparece cambiada de signo.
Dado el coeficiente de rozamiento μs=0.4, las posiciones θ para las cuales la partícula está en equilibrio serán aquellas para las que |Fr/N|<μs, es decir 0≤θ<θ1 (θ1=6.07°) y θ2<θ≤θe (θ2=54.38° y θe=78.46°)
Si la posición inicial de la partícula está en el intervalo θ1≤θ0≤ θ2 la partícula desliza hacia arriba, la velocidad angular es positiva dθ/dt>0. Las fuerzas sobre la partícula se muestran en la figura.
La ecuación del movimiento es
Supongamos que el coeficiente cinético de la pista es μs=μk=0.4 y la partícula parte en reposo desde la posición θ0=π/6 (30°) que es mayor que θ1 y menor que θ2
function pista_4
R=1; %radio
w=7; %velocidad angular de rotación
mu=0.4; %coeficiente estático y cinético
f=@(t,x) [x(2); (w^2*cos(x(1))-9.8/R)*sin(x(1))-mu*(w^2*sin(x(1))^2+
9.8*cos(x(1))/R)];
opts=odeset('events',@stop_pista);
[t,x]=ode45(f,[0,10],[pi/6,0], opts);
plot(t,x(:,1)) %tiempo, posición
set(gca,'YTick',0:pi/12:pi/2)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3',
'5\pi/12','\pi/2'})
xlabel('t')
ylabel('\theta');
title('Pista con rozamiento')
grid on
th=x(end,1);
disp([t(end), th*180/pi])
N=w^2*R*sin(th)^2+9.8*cos(th);
Fr=9.8*sin(th)-w^2*R*sin(th)*cos(th);
disp([Fr, mu*N])
function [value,isterminal,direction]=stop_pista(~,x)
%x(1) es x, x(3) es y
value=x(2);
isterminal=1; %1 detiene cuando la velocidad se hace cero
direction=-1;
end
end
0.5736 73.0992 -4.2531 19.0831
La partícula se detiene en la posición θ=73.1° empleando un tiempo de t=0.57 s.
En la posición en la que se detiene, la fuerza de rozamiento vale Fr=4.25 que es menor que la máxima μsN=19.08 N
Actividades
Se introduce
- La posición angular inicial θ0, en el control titulado Posición angular inicial.
- La velocidad angular de rotación ω, en el control titulado Velocidad angular.
- El coeficiente de rozamiento μ, en el control titulado Coeficiente rozamiento.
- El radio de la pista circular se ha fijado en R=1.0 m
Se pulsa el botón titulado Nuevo
Observamos el movimiento de la partícula en equlibrio o deslizando a lo largo de la pista circular, tal como lo vería un observador no inercial que girase con la pista circular. Se marca la posición angular de equilibrio estable θe.
En la parte derecha, se representa la curva de energía potencial Ep(θ) en color azul, la energía total E (un segmento de color negro). La partícula oscila alrededor de las posiciones de equilibrio θe entre las posiciones de retorno, una es la posición inicial θ0 y la otra la raíz de la ecuación Ep(θ)=Ep(θ0).
Referencias
Thomas E. Baker, Andreas Bill. Jacobi elliptic functions and the complete solution to the bead on the hoop problem. Am. J. Phys. 80 (6), June 2012. pp. 506-514
I. S. Gradshteyn, I. M. Ryzhik. Table of Integrals, Series, and Products. Seventh Edition. Elsevier (2007). Integrales: (primera solución) pág. 282, 3.152, n° 9, (segunda solución) pág. 282, 3.152, n° 4, (tercera solución) pág. 97, 2.266, caso (a>0, Δ<0)