

Modelo mecánico de trayectorias polares
Consideremos una varilla que puede girar en el plano horizontal con velocidad angular Ω constante alrededor de un eje perpendicular a la varilla. El anillo de masa m, que puede desplazarse a lo largo de la varilla sin rozamiento, se sujeta al eje mediante un muelle de constante k.
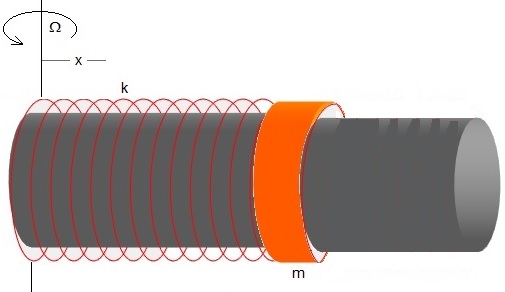
Representamos las fuerzas sobre el anillo de masa m en el instante t, cuando se ha desplazado x del eje de rotación y lleva una velocidad dx/dt
La fuerza que ejerce el muelle elásticos, k(r-l0). Siendo l0 la longitud del muelle sin deformar
La fuerza centrífuga, , de módulo mΩ2r, ambas en la dirección radial
La fuerza de Coriolis, es perpendicular a la varilla y su sentido se indica en la figura. La reacción N' o fuerza que ejerce la varilla sobre el anillo es de sentido contrario.
- El peso mg del anillo y la reacción N de la varilla, no se han representado por que no influyen en el movimiento del anillo
La ecuación del movimiento en el Sistema de Referencia No Inercial (en rotación) de la varilla es
La solución particular es una constante C, introduciendo en la ecuación diferencial
La solución completa (homogénea+particular) de la ecuación diferencial es
Si Ω<ω0
Si Ω=ω0
Si Ω>ω0
donde los coeficientes A y B se determinan a partir de las condiciones iniciales. Si el anillo parte del reposo dr/dt=0 en el instante t=0, entonces B=0
La aceleración es constante, tenemos un movimiento uniformemente acelerado
La ecuación diferencial es
La solución particular es una constante C, introduciendo en la ecuación diferencial
La solución completa de la ecuación diferencial es
donde los coeficientes A y B se determinan a partir de las condiciones iniciales. Si el anillo parte del reposo dr/dt=0 en el instante t=0, entonces A=B
La distancia radial se incrementa exponencialmente con el tiempo
La trayectoria en el Sistema de Referencia No Inercial es rectilínea a lo largo del eje X'. Hemos calculado la distancia r al origen en el instante t
Trayectoria en el Sistema de Referencia Inercial
Conocida la posición (x', y') de la partícula en el Sistema de Referencia No Inercial, la posición (x, y) de la partícula en el Sistema de Referencia Inercial es
En este caso, x'=r e y'=0
Cuando Ω<ω0
La partícula oscila en el eje X'. Las órbitas que describe en el plano XY serán cerradas si Ω/ω es un número racional α=p/q.
LLamamos θ=Ωt, La trayectoria x, y del anillo es
Velocidad radial
La velocidad en la dirección radial es
La velocidad radial se hace nula en las posiciones de retorno, θ=Ωt=nπα
Cuando n es par el coseno es positivo, la máxima distancia al origen es
-
Cuando n es impar el coseno es negativo, la mínima distancia al origen es
Periodo
El anillo parte de la posición θ=0, r=A+(1+α2)l0 y regresará a dicha posición despues de n vueltas θ=2nπ
Donde q, p, n y m son enteros. Cuando m=q, entonces n=p
La trayectoria se repite cuando el ángulo θ=2pπ, como podemos comprobar en los ejemplos
Cuando Ω>ω0
La partícula describe una espiral logarítmica
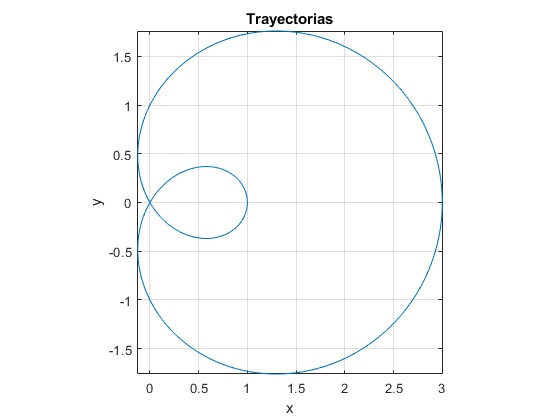
Ejemplos, Ω<ω0
Este es el código del program del script que dibuja las trayectorias en el Sistema Inercial de Referencia para Ω<ω0
p=1; %número entero
q=3; %número entero
alfa=p/q; %número racional
l0=0.5; %longitud del muelle sin deformar
A=1; %amplitud
r=@(t) A*cos(t/alfa)+(1+alfa^2)*l0;
x=@(t) r(t).*cos(t);
y=@(t) r(t).*sin(t);
fplot(x,y,[0,2*pi*p])
grid on
axis equal
xlabel('x')
ylabel('y')
title('Trayectorias')
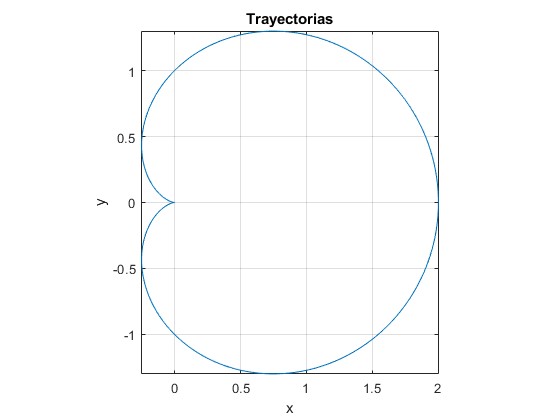
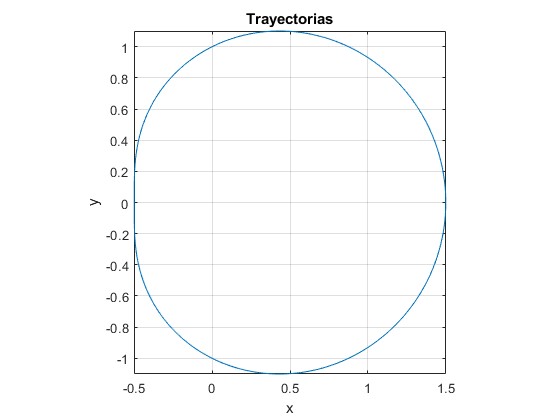
p=1, q=1, l0=0.5
A=2
A=1
A=0.5
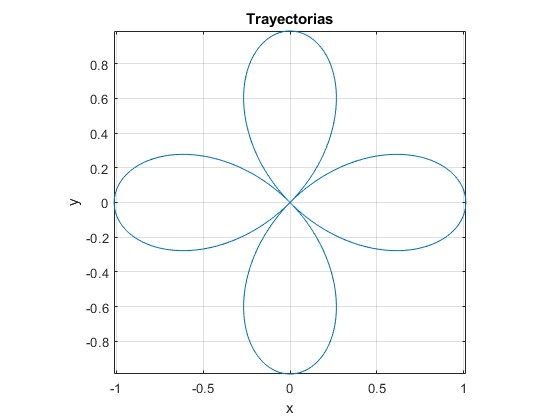
l0=0.01, A=1, p=1
q=2.
q=3
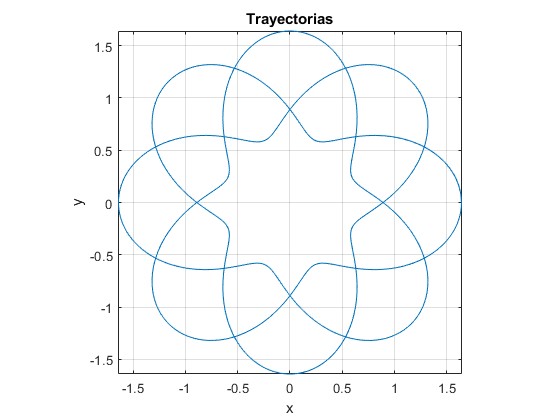
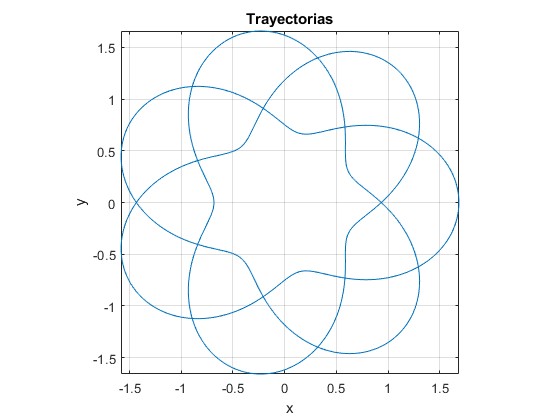
l0=1, A=0.5, p=3
q=8
q=7
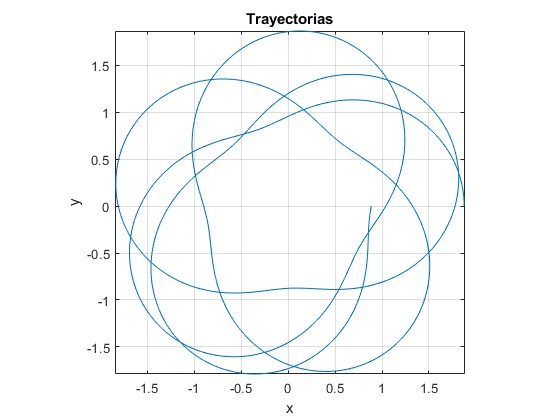
Trayectorias abiertas. l0=1, A=0.5
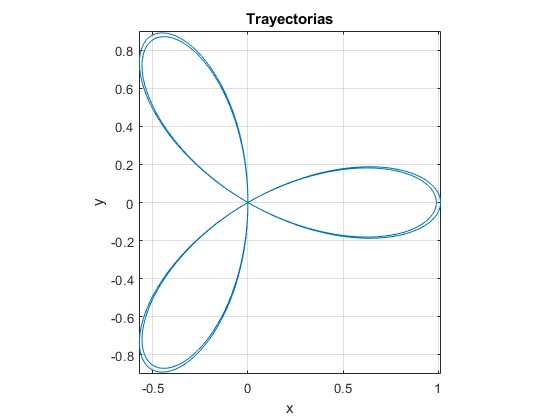
alfa=sqrt(3/7);
l0=1;
A=0.5;
r=@(t) A*cos(t/alfa)+(1+alfa^2)*l0;
x=@(t) r(t).*cos(t);
y=@(t) r(t).*sin(t);
fplot(x,y,[0,8*pi])
grid on
axis equal
xlabel('x')
ylabel('y')
title('Trayectorias')
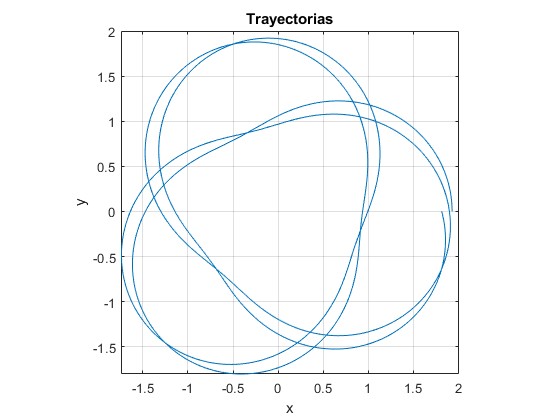
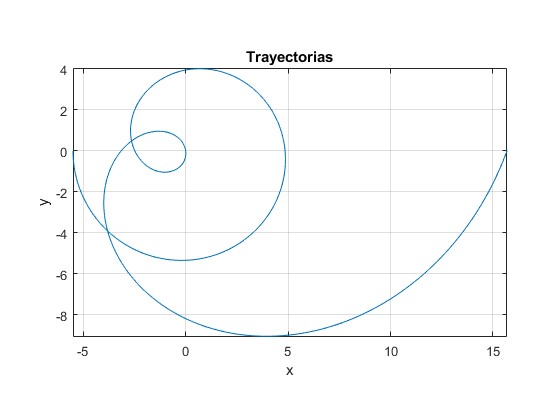
Ejemplos, Ω>ω0
Este es el código del program del script que dibuja las trayectorias en el Sistema Inercial de Referencia para Ω>ω0
alfa=4;
l0=0.5;
A=1;
r=@(t) 2*A*cosh(t/alfa)-(alfa^2-1)*l0;
x=@(t) r(t).*cos(t);
y=@(t) r(t).*sin(t);
fplot(x,y,[0,4*pi])
grid on
axis equal
xlabel('x')
ylabel('y')
title('Trayectorias')
Actividades
Para el caso Ω<ω0. Se introduce
- La amplitud, A en el control titulado Amplitud
- La longitud del muelle sin deformar, l0 en el control titulado Longitud
- El numerador p del número racional, en el control titulado numerador
- El ndenominador q del número racional, en el control titulado denominador
Se pulsa el botón titulado Nuevo
Probar con los siguientes valores
| A | l0 | p | q |
|---|---|---|---|
| 2 | 0.5 | 1 | 1 |
| 1 | 0.5 | 1 | 1 |
| 0.5 | 0.5 | 1 | 1 |
| 1 | 0.01 | 1 | 2 |
| 1 | 0.01 | 1 | 3 |
| 0.5 | 1 | 3 | 8 |
| 0.5 | 1 | 3 | 7 |
Referencias
L Motta, R Dutra, L Pereira, A Faria, M V Silveira, A C F Santos. A mechanical model for polar curves. Eur. J. Phys. 45 (2024) 045002